基于现场可编程门阵列的电机控制器硬件在环测试
2021-06-24李忠虎王潇霈化玉伟
张 璐,李忠虎*,王潇霈,化玉伟
(1. 内蒙古科技大学信息工程学院,包头 014010; 2. 内蒙古自治区光热与风能发电重点实验室,包头 014010; 3. 清华大学汽车安全与节能国家重点实验室,北京 100084)
随着汽车研发行业的发展,传统的手工编写算法代码的开发模式已经不能满足需求,电机控制器测试涉及提前设计相应的硬件接口电路,在这个测试过程中开发的算法和编写的程序必须要在所有硬件电路完成后才能测试算法的正确性,为此一旦测试过程中硬件电路出现问题,需要从硬件设计环节开始修改[1-2],势必会导致开发周期延长和开发效率降低等问题。利用HIL和快速控制原型(rapid control prototype,RCP)可以节约成本和缩短时间,同时可以方便实现故障模式注入和故障诊断测试,对电机控制器故障安全测试有一定的意义[3-5]。文献[3]设计了一种基于DSP(TMS320F2812)为主控芯片的电动汽车用无刷直流电机控制器。对电机控制器硬件系统功能进行实车实验。文献[4]利用Infineon Tricore 1782芯片开发电机控制单元(motor control unit,MCU)并基于ETAS公司的HIL系统搭建测试平台,完成电机控制器与硬件在环系统的闭环调试与测试,文献[5]采用基于V流程的模式,利用DSP开发了电机控制器并利用Typhoon HIL电力电子半实物仿真平台上对其进行测试。然而这些研究虽然开发了电机控制器,还有利用HIL对所开发的电机控制器进行控制功能测试,但测试平台缺乏故障模式的注入对电机控制器进行控制功能和故障诊断测试。
其中故障安全包括故障检测、诊断而管理也被应用到各个方面车辆控制系统。在复杂的电力系统中驱动系统有电动或混合电动两种车辆,对于异常状态,很难预测[6]。因此,故障安全测试是非常值得优先考虑的。在许多情况下,MCU的失效模式试验在实验室里是不容易操作的环境。一般来说,单片机中的故障模式测试,如电线短路或开路,是特别困难的,因为它们很耗时、昂贵且测试样本数量有限。选择HIL的方法测试可以在优化成本和缩短时间前提下进行故障模式测试。
在硬件在环仿真平台上搭建逆变器及PMSM的实时仿真系统模型,利用RCP将电机控制Simulink模型代码下载到DSP形成电机控制板,通过设计合适的线束使得电机控制板和硬件在环仿真平台接口信号匹配,进而实现永磁同步电机控制器功能测试。并在HIL仿真平台上测试控制器基本功能及逆变器开路和短路等故障模式,验证控制器控制功能以及故障检测算法的可行性。
1 电机控制器HIL测试平台总体结构
搭建的电机控制器硬件在环测试平台总体结构如图 1所示。它由电机控制器和HIL测试平台两部分组成。选取TI公司的TMS320F28335芯片作为电机控制器,该DSP芯片具有较强的浮点运算能力,能够实时采集HIL系统发出的电流和位置信号[7]。在完成电机控制策略和故障诊断算法Simulink建模后,通过自动代码生成技术下载运行在电机控制DSP中,控制板将6路脉冲宽度调制(pulse width modulation,PWM)门极驱动信号输出到逆变器模型,对电机驱动系统进行控制。

图 1 电机控制器硬件在环测试平台总体结构Fig.1 Overall architecture of the motor controller hardware-in-the-loop test platform

图 2 永磁同步电机的有限元分析模型Fig.2 Finite element analysis model of permanent magnet synchronous motor
在LabVIEW上建立了永磁同步电机和三相逆变器的数学模型,将模型在FPGA里运行编译,FPGA是一种现场可编程门阵列技术,因其是用硬件描述语言建立模型,为此大大提高了实时性。
2 HIL系统模型搭建
2.1 永磁同步电机线性模型
为满足测试的需求,考虑仿真平台的实时性,根据d-q轴坐标系建立PMSM仿真模型并运行在 FPGA里。电压方程为
(1)
磁链方程为
(2)
将式(1)和式(2)进行合并,整理微分项移至左侧得
(3)
将式(3)进行离散化处理,得到电机模型中的d-q轴电流迭代表达式为
(4)
电磁转矩方程式为
(5)
电机模型的运动方程式为
(6)
将式(6)进行离散化处理,得到电机模型中的转速迭代表达式为
(7)
式中:ud、uq分别为d、q轴定子电压;id、iq分别为d、q轴定子电流;ψd、ψq分别为d、q轴磁链分量;ωr为电机转子角速度;R为定子每项电阻;Ld、Lq分别为d、q轴电感;ψf为永磁体磁链;Te、TL分别为电机转矩和负载转矩;B为旋转阻尼系数;J为转动惯量;np为转子极对数。
在LabVIEW中,根据电机的运行公式建立对应的仿真模型。真实的永磁同步电机其电感不是常量而是非线性变化的,模型的准确度影响半实物仿真平台的精度,因此,必须考虑电感的非线性变化。在该系统中,永磁电机电感参数和磁通参数由JMAG软件创建的有限元模型生成,能够很好地反映电感的非线性变化,使HIL仿真更接近实际情况,从而大大提高了电机的仿真精度[8]。
2.2 永磁同步电机有限元模型
按照JMAG构建永磁同步电机的几何模型的一般流程,首先设定材料属性和边界条件。如图 2所示,由有限元模型生成永磁电机电感参数和磁通参数,根据永磁同步电动机的结构建立永磁同步电机模型[9]。其极数4极,定子槽数24个,转子内径60mm,气隙长度0.2mm,额定功率1.5kW。
建立的有限元模型电感Ld和Lq分别与电流id和iq关系的仿真曲线如图 3、图 4所示,验证了所建立的有限元模型的正确性。
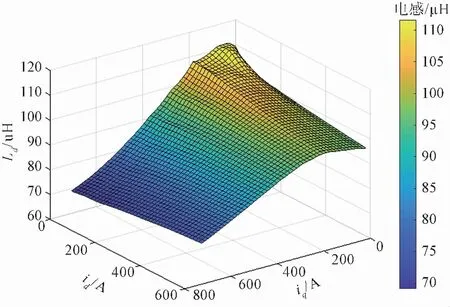
图 3 d轴电感与电流的对应关系Fig.3 The correspondence between inductance and current on axis d

图 4 q轴电感与电流的对应关系Fig.4 The correspondence between inductance and current on axis q
基于有限元的永磁同步电机模型,同样也在FPGA中进行计算,在LabVIEW中,通过调用读取的永磁同步电机RTT文件sub-vi,实时获取JMAG生成的RTT文件中的电感和磁通参数,并将其输入电机模型进行高精度实时仿真。
2.3 逆变器模型
实际的电机控制器输出的开关频率较高,可以达到100kHz,在LabVIEW软件中建立逆变器的数学模型在FPGA里编译运行从而达到微秒级步长。
以三相桥式逆变器为例,对其一个支路分析IGBT开关状态和电流方向。三相桥式逆变器如图 5所示。单桥臂具有以下3种状态:①V1开关打开,V4开关关闭; ②V4开关打开,V1开关关闭; ③V1和V4开关关闭。

V1、V2、V3、V4、V5、V6为6个开关; Sa、Sb、Sc为桥臂; Udc为逆变器的直流供电压; Ua、Ub、Uc为a、b、c三相电压图 5 两电平三相电压型逆变器示意图Fig.5 Schematic diagram of two level three phase voltage source inverter
通过ia的方向和PWM驱动信号可以得到桥臂的输出电压[10]。
负电流时输出电压为
Va=DH(VD+Vdiode)+DZ(VD+Vdiode)-iaDHROR
(8)
式(8)中:DH为高压侧占空比;DL为低压侧占空比;DZ=(1-DH-DL);VD为电池电压;Vdiode为二极管压降;ROR为开关电阻状态;ia为输入相电流;Va为相输出电压。
零电流时,输出电压可用式(9)表示。在这个方程中,如果Va>VD+Vdiode,那么Va=VD+Vdiode。如果Va<-Vdiode,那么Va=-Vdiode。若Va介于VD+Vdiode~-Vdiode,则Va保持其值。即
VD+Vdiode≤Va≤-Vdiode
(9)
正电流时输出电压:
Va=DHVD-DLVdiode-DZVdiode-iaDHROR
(10)
2.4 永磁同步电机控制模型
永磁同步电机的矢量控制的核心思想是利用d-q坐标系将其数学模型简单化,采取经典的PI控制分别对id、iq电流进行控制[11],N为实际转速,N*为设置参考转速,θ为设置偏移角度。转速外环提供电流的参考值,其控制原理图如图 6所示。

图 6 永磁同步电机矢量控制原理图Fig.6 Schematic diagram of vector control for permanent magnet synchronous motor
2.5 基于模型的FOC自动生成代码
利用Embedded coder实现Simulink模型到CCS工程的自动代码生成。模型中包含电机矢量控制部分、传感器部分及CAN输入输出部分等,所搭建的自动生成代码控制器模型部分如图 7所示。
3 硬件在环仿真平台
如图 8所示,该系统可以分为上位机、下位机、NI线缆等。上位机采用NI公司LabVIEW软件建立仿真模型,并对仿真模型进行统一管理及修改参数;下位机采用NI的RT实时控制器及输入输出硬件板卡。其中的FPGA板卡信号接口速度快,处理器运行速度更快。

图 7 永磁同步电机矢量控制器模型Fig.7 Vector controller model of permanent magnet synchronous motor
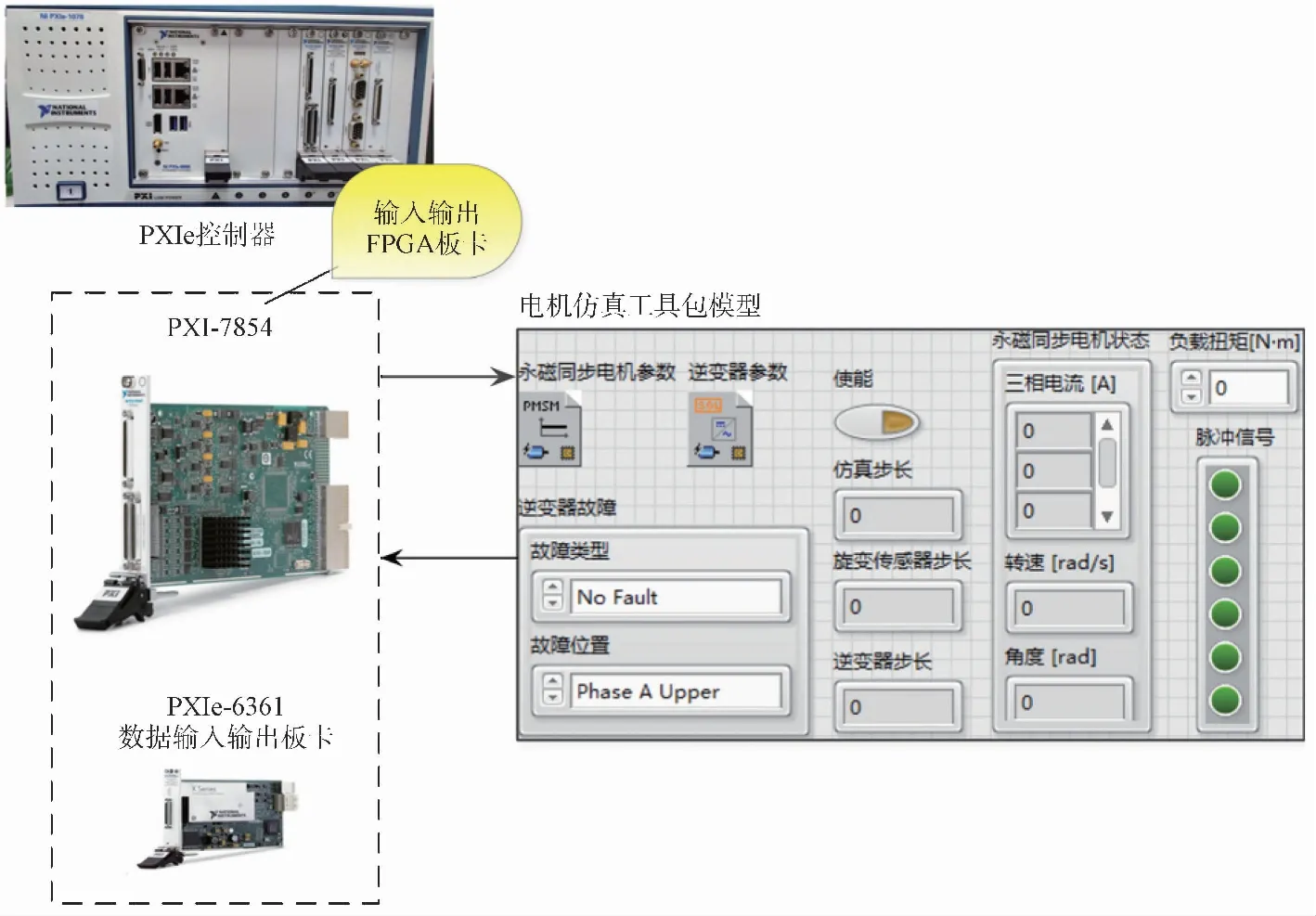
图 8 硬件在环仿真平台结构图Fig.8 Structure diagram of hardware-in-the-loop simulation platform
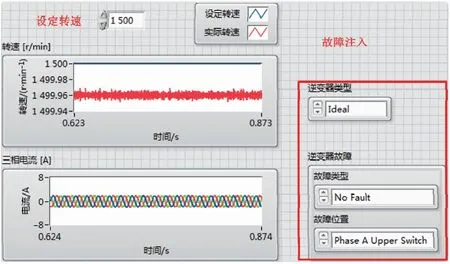
图 9 逆变器故障注入模型Fig.9 Inverter fault injection model
在FPGA运行逆变器、电机等模型,模型中的PWM驱动信号、电流信号、电压信号及位置等输入输出信息通过配置FPGA的I/O与MCU相连接。其余温度信号的模拟可以由输入输出采集板卡模拟并通过I/O将信号传递给MCU[12]。采用的NI实时控制器配置及板卡的简单功能描述如表 1所示。
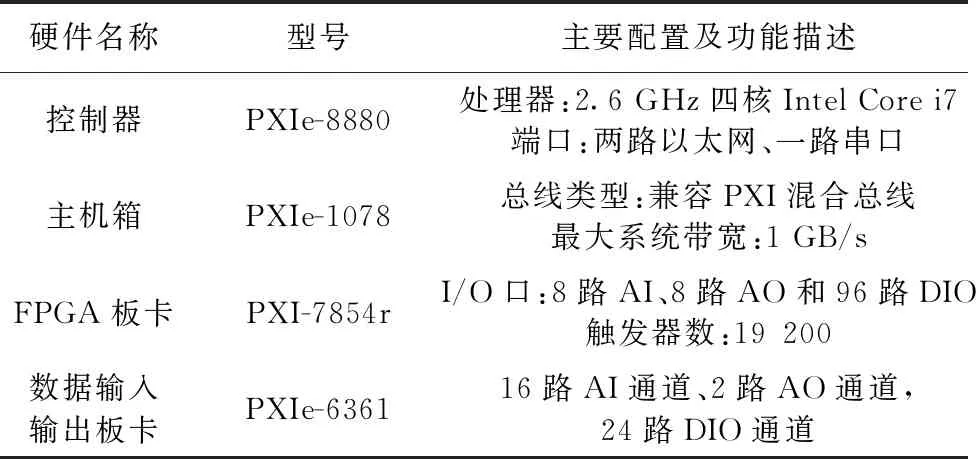
表 1 PXI实时控制器配置及板卡Table1 PXI real-time controller configuration and board card
HIL仿真平台可以实现故障模式注入,实现方式可以分为两种,方式一为配置故障注入板卡,而且一旦配置完成,可在各轮测试中反复使用,大幅提高了测试效率;方式二为通过上位机进行故障类型的选择及故障注入操作[13],即在逆变器模型中加入故障注入程序,例如逆变器短路、开路等LabVIEW中添加逆变器故障模型,可以模拟逆变器开路和短路等故障。
采用方式二的故障注入方法,如图 9所示红色框为IGBT故障注入模型。
4 仿真结果
在使用HIL模拟器进行MCU测试时,需要在HIL模拟器与MCU(或RCP)之间进行接线。本次测试给定电机3种运行状态来测试电机控制器算法的有效性和性能,第一种运行状态:转速控制模式让电机载0.5 N·m,初始启动速度给定为正转100 r/min;第二种运行状态:电机由正转100 r/min继续加速到正转200 r/min;第三种状态:转矩控制模式在电机运行稳定时将带载由0.5 N·m突加到4 N·m。HIL测试实验平台如图 10所示。3种状态测得电机速度和三相电流分别如图 11~图 13所示。

图 10 HIL测试实验平台Fig.10 HIL test and experiment platform

图 11 运行状态1Fig.11 Running status 1
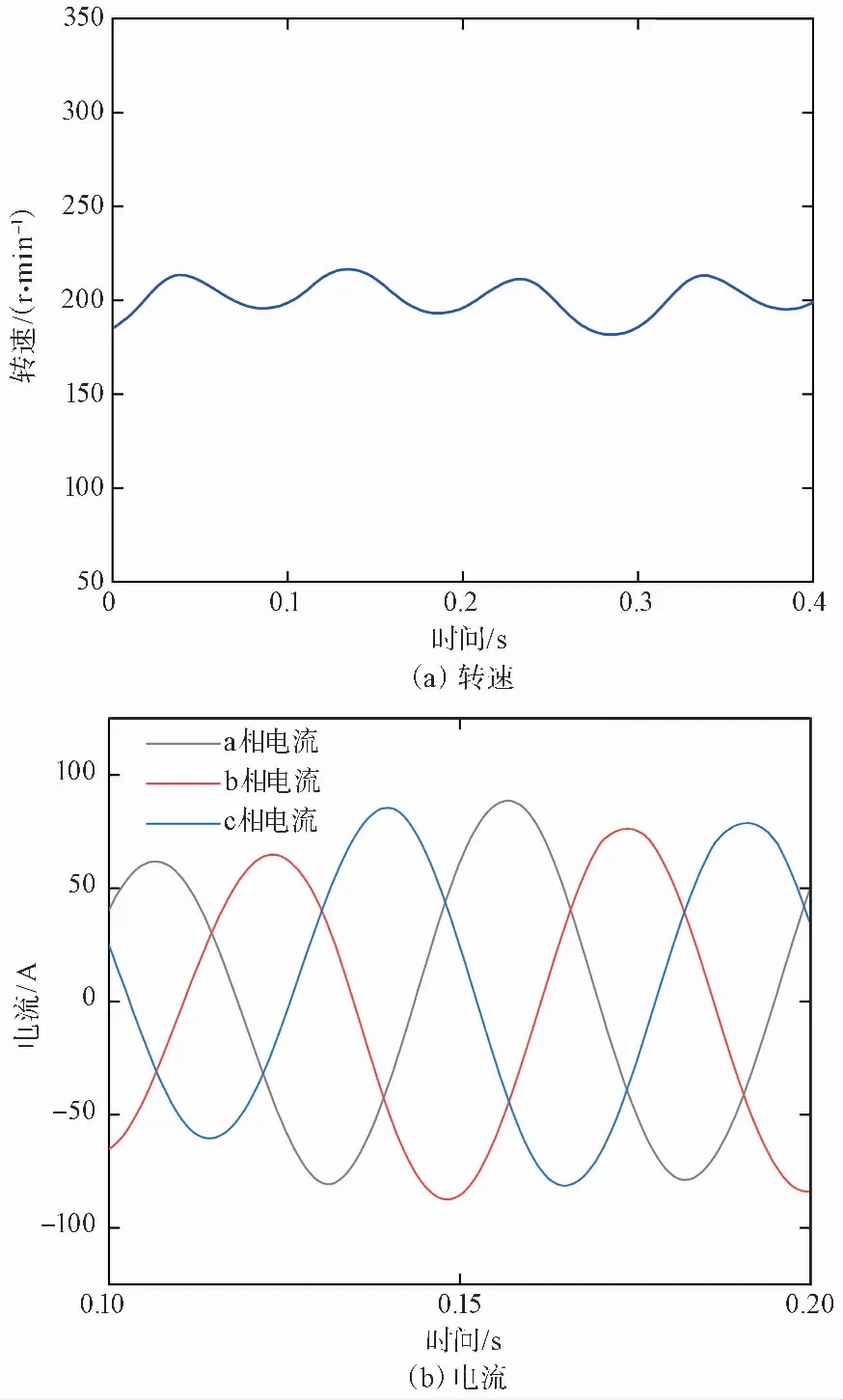
图 12 运行状态2Fig.12 Running status 2
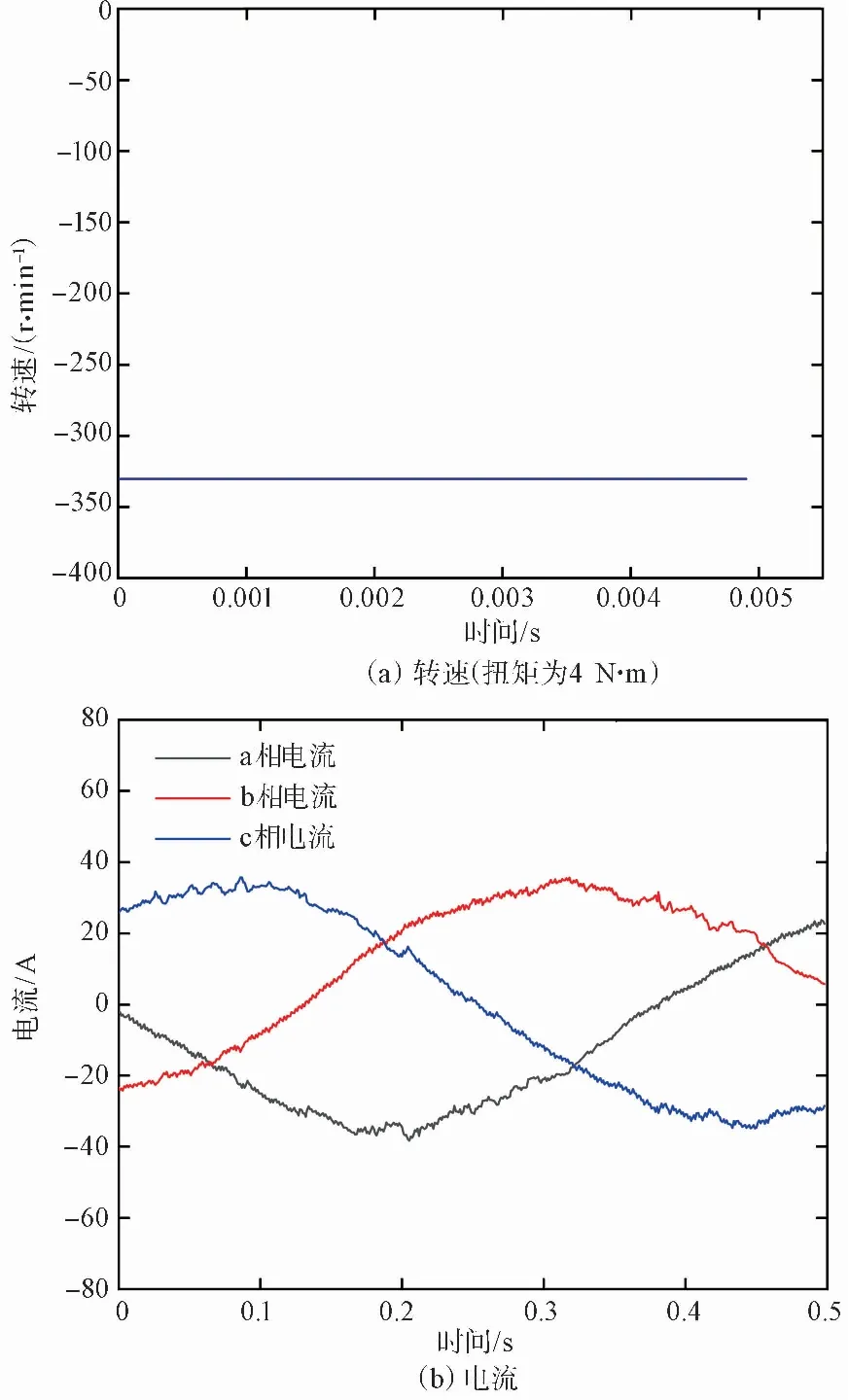
图 13 运行状态3Fig.13 Running status 3
图11 ~图 13显示了半实物仿真平台可以测试控制器基本性能,动态响应较快,转速平稳,启动瞬间三相定子电流存在较小的脉动;转速增加时三相电流幅值随之增加。
a相上桥臂开路故障,三相电流幅值发生变化,控制器能够通过调节保持在200r/min左右。a桥臂IGBT和二极管短路故障,IGBT最严重的故障是开关元件短路。它会使车辆失去动力,使驾驶员和乘客暴露在危险中,特别是在高速行驶的环境下,添加故障后,控制器检测到故障后速度经过调整立即降为0。结果如图 14~图 15所示。

图 14 逆变器上桥臂开路仿真图Fig.14 Simulation of open circuit of inverter upper bridge arm

图 15 逆变器上桥臂短路仿真图Fig.15 Simulation of short circuit of inverter upper bridge arm
5 结论
在FPGA平台上搭建了永磁同步电机实时仿真测试平台,在JMAG软件中建立了电机有限元模型,利用HIL测试平台和RCP形成完整的新能源电机控制器半实物仿真系统。仿真结果表明,所搭建的实时仿真测试平台能够与电机控制器协调工作,完成电机控制器动态控制性能的测试和逆变器开路和短路的故障检测,该系统不仅可以缩短开发周期,节约开发成本,对进一步研究复杂故障注入测试来验证电机控制器故障安全逻辑有一定价值。
