一种基于SVM的倾斜摄影测量点云植被检测方法
2021-06-23王刚
王 刚
(广东省国土资源测绘院,广州510500)
1 引言
随着遥感和摄影测量技术的发展,地表植被覆盖数据的获取方式逐渐由传统的地面测绘,发展为基于多光谱遥感影像和激光雷达的植被特征检测。其中多光谱影像能够通过植被的光谱特征有效识别植被分布;而激光点云由于其独特的多次回波特性,能够准确提取地表植被点云。然而多光谱遥感和激光点云设备较为昂贵,且体积和重量较大,难以挂载到小型无人机上,限制了其在小范围、低成本项目中的应用。
相比之下,无人机挂载普通可见光镜头进行倾斜摄影测量,能够低成本、高效率的获取地表三维点云。因此越来越多的学者开始研究可见光点云中的植被检测方法。Natrajan 等[1]提出了使用卷积神经网络(Convolutional Neural Network,CNN)和迁移学习方法对植被三维点云进行分类。这种方法能够有效识别葡萄等农作物,但是容易将苔藓识别为植被,影响了分类精度。Zhao 等[2]提出了一种基于参考光谱背景去除(Reference Spectral Background Removal,RSBR)的新算法,可以通过去除图像背景来提取高密度植物区域,然而在植被密度较低的环境里精度不够理想。Brodu 和Lague[3]设计了针对复杂自然环境的三维点云分类方法,获得了较高的植被识别精度,但是这种方法需要相当程度的人工干预才能获取理想的精度。因此,本文以可见光点云的植被特征提取为切入点,提出了一种能够从倾斜摄影测量点云中有效检测出植被特征的方法,并通过实验对本方法的可行性进行了验证。
2 理论方法
2.1 点云预处理
2.1.1 点云平滑 倾斜摄影测量三维重建过程中,通常会在重叠度较高或具有明显特征的区域生成大量数据,而在边缘等重叠度较低或特征不明显的区域生成较少点云。虽然密集点云包含更多信息,但是大量的点在训练阶段需要更高的处理能力,同时也引入了三维重建过程中的误差。因此,为了减少分类时的计算量和分类时的误差,需要对点云进行平滑处理。首先采用基于密度的聚类(DBSCAN)算法对点云进行初步的聚类[4],然后对每个聚类构造超平面,将与此超平面距离超过阈值的点剔除,从而生成更加平滑和均匀的点云。
2.1.2 数据压缩 为了减少了机器学习必须处理的信息量,提升处理性能,需要对点云进行压缩。本文选择CIR 1991 模型[5],如式(1)所示对点云的灰度信息进行压缩。该式根据植被中的颜色分布频率为每个通道设定了权重,并将其转换为单一的灰度信息。由于绿色是植被中最常见的颜色,因此绿色通道比红色通道和蓝色通道的权重更大。

随后,该灰度通道被压缩成直方图,用作分类过程中的参数。由于灰度值介于0—255 之间,因此可以通过将灰度值的直方图估计为八类,每类代表32个灰度值的频率来实现压缩。
2.2 植被特征提取
本文采用PFH (Point Feature Histogram,点特征直方图)描述子进行特征提取,该几何特征通过使用多维直方图对点周边邻域的平均曲率进行编码,从而实现中心点邻域范围内空间差异的量化[6]。这种高维度特征表达方式不仅具有信息密度高的特点,同时具有平移和缩放不变性,能够较好的适应不同采样密度和噪声的影响。其主要流程如下图所示:首先对点云进行计算,生成特征向量。然后根据特征向量生成直方图,最后根据直方图的匹配情况进行分类。
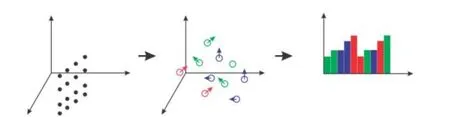
图1 PFH特征提取流程图

图2 不同地物点直方图示意
具体计算步骤如下:
(1)对于给定点P,其邻域空间内有N个相邻点;
(2)令P1、P2为领域中的任意两点,其法线向量分别为n1、n2;
(3)在点P1上建立局部坐标系,坐标系的三个单位向量u、v、w依次为

(4)基于已建立的坐标系,可以通过三个角度(α,φ,θ)来计算两个法线之间的差异,具体如下:
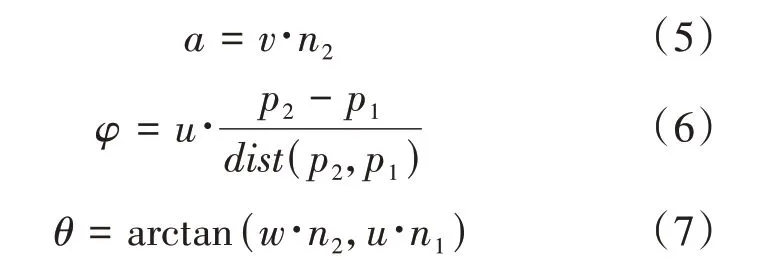
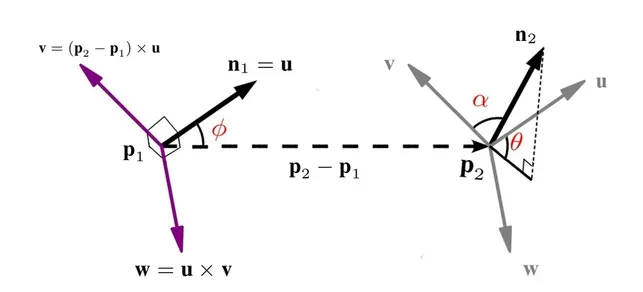
图3 局部坐标系示意图
(5)遍历邻域中的全部n个点,计算出每两个点之间的(α,φ,θ)三元角度组,总计得到个三元角度组。三元组中的每个特征值根据经验拆分为5等分,将其转换成一个125维的直方图,其中每一个维度代表了一个角度的取值范围。则P点的特征即表现为全部三元组分布在每个取值范围内的频率统计结果。
(6)不同类型的地物点的PFH 特征之间会有很大的差别,而相似的地物直接则会有接近的直方图分布。因此我们可以利用这个特征,根据直方图的相似程度,对点云进行分类。
2.3 分类后处理
完成分类后,根据地面点的颜色和与相邻植被点之间的距离综合考虑,找出其中未正确识别出的地面点加以剔除,进一步优化植被点云。具体思路为:当某个植被点与相邻地面点之间的距离小于地面点之间的平均距离,且该点颜色与最近的植被点聚类的平均颜色差距较大时,则认为该点为地面点,从植被点云中剔除。
3 实验分析
确定特征描述子后,采用基于支持向量机(SVM)的监督分类方法进行训练。本文采用大疆精灵4RTK 无人机,在梅州市蕉岭县龙潭林场进行了倾斜摄影测量。飞行高度120 m,航向重叠度为80%,旁向重叠度为70%,有效航测面积3.2 km2,采用Mirauge3D 三维建模软件进行三维重建,生成的点云按照4∶1 的比例拆分为训练集和测试集[7]。
首先采用商用点云处理软件LiDAR360 对训练集进行初步分类,并对自动分类结果进行人工检查和修改,将点云标识为植被点和地面点两类作为训练样本。然后根据训练样本学习后的结果对测试集进行监督分类,得到结果如图4所示,其中灰色为正确分类的地面点,绿色为正确分类的植被点,红色为被错误分类的植被点,黄色为被错误分类的地面点。
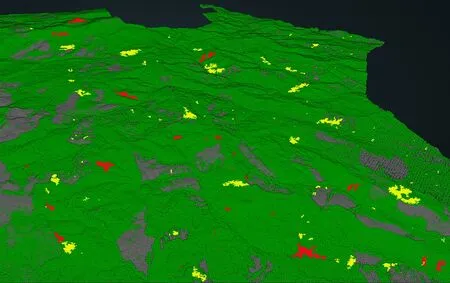
图4 植被检测结果
分类结果统计如下:
从实验结果分析来看,本方法具有较高的准确率和召回率,这说明植被检测的精度是比较高的,能够将绝大多数植被点提取出来。然而精确率相对不高,说明本方法虽然基本将植被都检测出来了,但是检测到的结果中存在一定比例的错误结果,将部分非植被点如建筑物、车辆误认为是植被了。从较高的F1 值来看,总体的植被检测结果具有较强的健壮性,能够稳定可靠的检测出植被点。
相比其他植被检测方法,高光谱遥感多采用NDVI(归一化差值植被指数)、RVI(比值植被指数)及SAV(土壤调节植被指数)[8]等植被指数结合支持向量机、决策树等方法进行植被提取,一般能够达到77.25%—91.87%的提取精度[8-9],与本方法对比没有明显的精度提升,但是对数据源的要求则高出很多。基于Lidar 的植被提取精度虽然精度比较高,可达98.3%[10]甚至更高,但是激光设备昂贵,难以满足低成本、小型化的项目需求。

表1 分类结果统计表
4 结论
倾斜摄影测量获取的三维点云由于可见光无法穿透植被的原因,无法利用多次回波的方式来检测植被;同时由于缺乏近红外光谱数据,难以通过NDVI 等方法进行植被检测。因此本文工作旨在通过倾斜三维点云中包含的几何特征和可见光信息来提取植被特征。首先对数据进行预处理,通过聚类至超平面的距离阈值对点云进行平滑,然后对点云光谱信息进行压缩,减少数据处理量;接着通过PFH 特征描述子进行特征提取,将植被典型特征描述为直方图;然后根据直方图匹配对植被点进行分类,分类后根据色彩和距离进一步对分类结果进一步过滤;最后采用基于SVM 的监督分类方法进行训练和分类。
总的来说,本方法只需要通过无人机挂载光学相机进行倾斜摄影测量,即可从三维重建获取的点云中提取出植被特征,在人工构筑物较少的区域具有比较高的精度,具有一定实际应用价值。