无人机探地雷达国内外应用探析
2021-06-23孙东风
孙东风
(北京欧华联科技有限责任公司,北京102200)
由于传统的地面探地雷达天线大多采用采用地面耦合天线,这在地形条件不好(如植被比较茂密、水面测量)或测量人员无法到达条件下实施困难。近年来瑞典Radarteam 地质雷达公司成功研制出COBRA 无人机探地雷达天线。该天线采用空气耦合技术,具有体积小、重量轻等显著特点,为无人机探地雷达应用提供了必要的使用条件。基于COBRA无人机探地雷达以上优点探讨未来无人机探地雷达的应用前景及展望。
1 方法原理及应用
地质雷达:利用超高频(106-109Hz)脉冲电磁波的反射来探测地下介质分布的一种地球物理探测方法[1,2]。地质雷达探测是一种先进的测试技术, 是近十余年发展起来的地球物理高新技术方法,以其分辨率高、轻便、定位准确、快速经济、灵活方便、剖面直观、实时图像显示等优点, 备受广大工程地球物理技术人员的青睐[3]。现已在高铁、高速路工程、地基探测、城市地铁路基探测、城市地铁路基探测、溶洞探测、湖水水深测量等众多领域得到广泛应用并取得了显著的探测效果。
2 Cobra 探地雷达搭载无人机的可行性研究
瑞典Cobra 无人机探地雷达系统由无人机、控制单元、数据记录器及探地雷达天线组成。基于以下几个方面对COBRA 探地雷达搭载到无人机可行性研究:
(1)由于Cobra 采用组合式天线,具有体积小、重量轻的特点,仅需要搭载重量>6Kg 的无人机即可,目前的国内外大多无人机(多旋翼无人机、固定翼无人机)都能满足这个搭载要求。
(2)采用空气耦合,无空气震荡效应。可以离地面一定距离进行测量,传统的地面耦合只能在地面拖动测量,该技术的实现为探地雷达搭载到无人机上提供了先决条件。
(3)采用实时采样技术,等效采样的探地雷达其极限探测深度为10 倍发射雷达子波波长。由于Cobra 采用实时采样技术提升了一倍以上探测深度,那么以常见的介电常数9 来计算的话理论上搭载SE-40 天线的探测深度应该在40m 以上。对地质雷达反射信号进行实时、逐点、顺序采样,即一个反射信号周期完成后,采样的同时完成储存,完全保证了地质雷达反射信号的真实性,高达每秒32000 叠加次数,大大的提高了分辨率及勘探深度。
综合以上技术特点该探地雷达系统具备搭载到无人机进行测量的技术要求。无人机地质雷达装置如图1 所示。

图1 COBRA 无人机地质雷达装置示意图
3 无人机地质雷达测量技术要求研究
传统的地面探地雷达测量时,需要考虑地雷达天线中心频率、测线布设、测线定位、测试速率、电磁波传播速度等几个技术要点。但无人机探地雷达对测量技术有更多的技术要求。无人机飞行的稳定性、飞行速度、飞行高度、风速都可能对测量结果好坏有一定影响。就上述几个方面对无人机探地雷达技术的要求进行探讨:
(1)飞行高度要求:一般要求无人机是尽可能低飞。当飞行高度小于与探地雷达中心频率相对应的电磁波长时,将获得较好的测量结果。
如果测量区域有树木或其它高大的植被,是否可以利用无人机地质雷达进行测量做了如图2 测量试验。
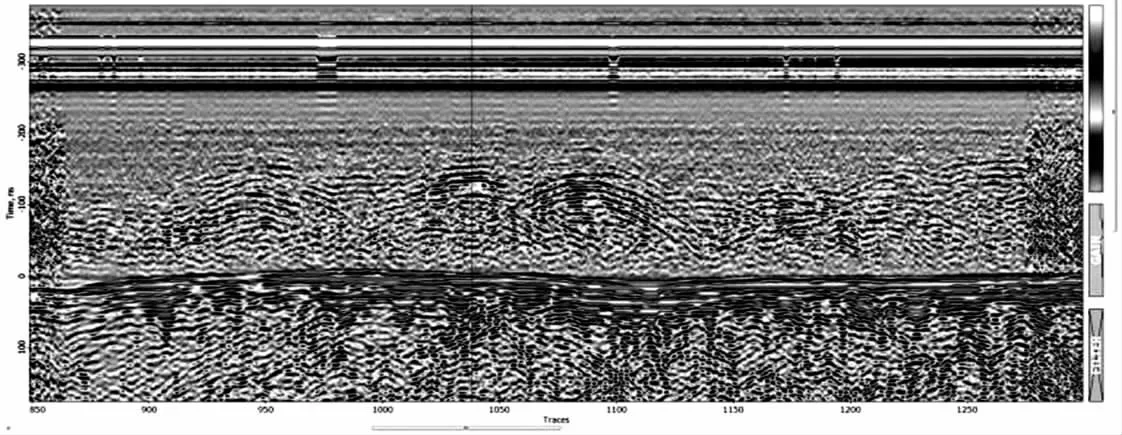
图2 45-50 米飞行高度采集的探地雷达结果
图2 可以清晰的看到树木和地表的反射,尽管测量区域有已知的洞穴存在但测量结果看不到任何有用的反射界面存在。
简单的公式可以用来计算建议的高度(或空气中的波长)以米为单位:
高度=300/[GPR 中心频率为兆赫]
(2)飞行速度要求:主要原因是无人机高速转动。GPR 的天线体积较大,在高速飞行过程中由于受到空气的阻力,导致无人机飞行的不稳定或者振荡。如果使用DJI M600 Pro 无人机和Radarteam 的Cobra 插入式GPR 天线,最高速度为3m/s。为了保证获得更好的数据质量,建议飞行速度更慢,2m/s 甚至1m/s。
(3)风速要求:无人机的振荡往往会产生噪音甚至获得无用的数据。风速和阵风是无人机探地雷达飞行的限制因素,5 米/s以上的风速会使无人机的飞行稳定性大大降低。建议在无风或者风速很小的条件下进行测量。
(4)飞行测线设置要求:无人机雷达测量过程中在每条测线的起点和终点,无人机都会加速和减速。在这时间段内,无人机会稍微向前摆动(在U 型转弯后,会稍微向一个垂直方向摆动)都将带来一定的噪声。要想获得较好的数据需要把测量线延伸到指定的测量区域以外。使测量的超过测线长度可以用一个简单的公式来估算:5mx[飞行速度]。例如,2m/s 的飞行速度的人使用10 m 以上的超测线长度。这个距离将足以加速和稳定无人机的飞行姿态。
4 无人机雷达探测湖床实例
该测量实例利用DJI M600 Pro无人机搭载Radarteam SE-150 天线无人机地质雷达系通进行测量,在水面飞行高度3m, 飞行速度为2 m/s,使用带有Mesa 记录器并配置GNSS 接收机进行野外实时数据采集,定位精度小于30cm。野外测量飞行线路如图3 所示。

图3 野外测量飞行线路图
图4 为无人机探地雷达在某地区的试验结果。通过测量结果可以清晰湖水水底界面的强反射层,通过已知点的湖水深度校正设置介电常数,可以准确确定整个探测区域的水深。通过此次试验可以证明无人机探地雷达应用在水深测量中具有很好的效果。
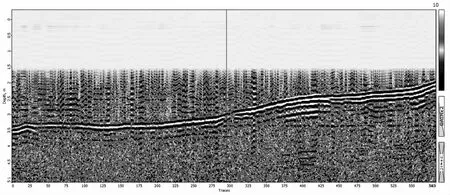
图4 2 号测线野外测量成果图
5 结论
实际应用证明无人机探地雷达可以解决很多地面探地雷达难以解决的工程地质问题,无人机雷达探测速度更快,测量效率高,可以在任何地形条件下测量。如何解决无人机飞行的稳定性、避免无人机飞行带来的干扰、无人机探地雷达实现实时传输数据,如何建立地面与无人机探地雷达实时传输并成像等工作。还需要做进一步的试验和大量的研究工作,无人机探地雷达未来具有很好的应用前景。
