基于智能RMC70 运动控制器的双缸液压同步控制试验系统技术研究
2021-06-22闫洪霞
闫洪霞
(北京电子科技职业学院 机电工程学院, 北京 100176)
0 引言
随着我国工业生产自动化发展水平的不断进行提高,液压同步驱动控制信息技术在航空航天、 金属材料的加工、工程施工机械、机械军工等领域的应用也越来越多,同时,这些不同行业对同步控制精度的要求我们也是企业越来越高。因此,为满足各行业各个领域的需求,双缸同步运动控制技术的研究具有更重要的理论意义和工程实践价值[1-2]。双缸的同步控制系统研究是此领域发展研究的基础,油缸之间如何实现同步运动是保证机器设备安全运行的关键,然而,在实际工业系统中,影响液压伺服系统性能的因素很多,如负载、油液压力和模型参数等,这些非线性扰动将会通过降低系统的定位精度, 因此会引起油缸的同步误差很大,液压同步控制技术得以发展[3-5]。
本文根据智能运动控制器的工作原理开发基于DELTA 公司RMC70 系列液压控制系统的同步控制,并对同步控制的方法进行论述。
1 智能RMC70 运动控制系统
智能RMC70 系列进行运动作为控制器是一款高性能又兼顾客户容易方便使用的高性价比单轴或双轴系统。
智能RMC70 控制性能非常好,它主要由双向回路的位置-压力控制算法与多种实际值反馈组成,现在已经变为液压及电气传动的定位和位置压力双向回路控制的最优解决方案。
2 双缸同步控制液压系统的建模及分析
2.1 双缸液压运动控制系统原理图
双缸液压运动控制系统以比例伺服阀、 油缸等液压元件,通过管道连接形成通路,利用位移传感器实时采集系统的位移信号信息,利用控制器可以进行管理决策,输出控制信号,经比例放大器放大,驱动比例伺服阀滑阀阀芯运动, 从而改变流入和流出液压回路中油缸的两个腔室的流量。 左右两腔压差的存在, 驱动活塞杆伸出和缩回,使活塞杆运动到期望位置。
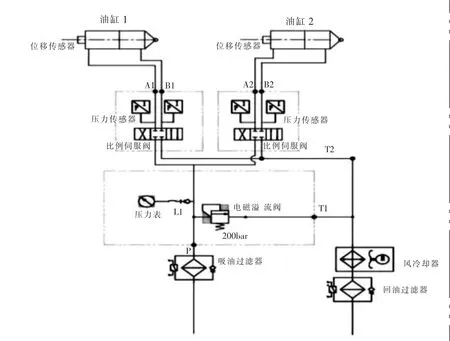
图1 双缸液压运动控制系统原理图Fig.1 Two-cylinder hydraulic system principle
2.2 双缸电液比例同步系统建模
本文通过研究的双缸同步控制系统的简图, 双缸同步控制系统包括两个通道的电液比例系统。 对于同步控制系统的两个油缸之间存在力的耦合作用, 加上安装精度等一些因素的影响,造成双油缸位置的不同步。为消除上述的位置同步偏差,本文研究增加了同步控制器,设计发展同步控制系统算法。根据双缸同步控制系统的特点,建立以下数学模型。
双缸同步控制系统的组成框图如图2 所示。
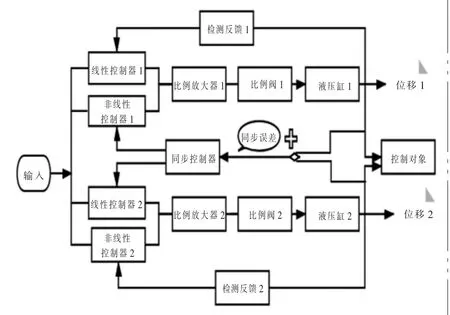
图2 双缸同步控制系统组成Fig.2 Duplex synchronoussystem
本文离线状态下,建立液压系统数学建模∏n,

式中:[λ1i,λ2i,λ3i]T—反馈比例增益矩阵;ωc—反馈控制器的带宽增益。
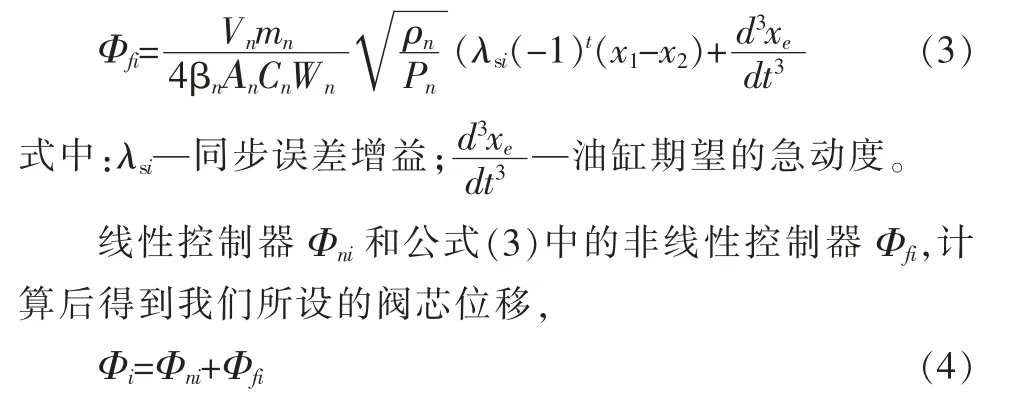
所设的阀芯位移最终是以模拟量电流信号输出。
3 实际系统测试
基于配有智能RMC70 运动控制器的双缸液压同步控制实验系统进行试验。 实验中使用了KH2000 稳压电源,RMC70 运动控制器,位移传感器、二阶微分器、双缸液压系统等。 实验装置见图3。
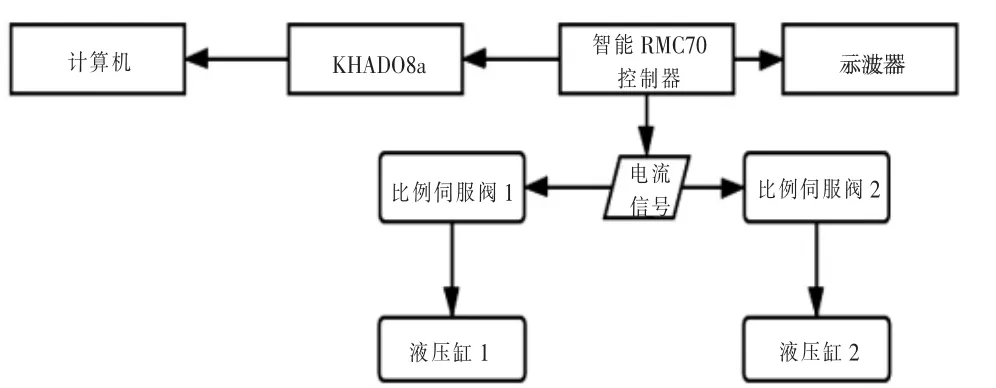
图3 实验装置示意图Fig.3 Experiment device schematic
工况如下:油缸期望的位置xe=0.05m。
油液压力可以预设成P=1.05Pn+0.05Pnsin(4πt),存在小幅正弦波动。
本文基于常用参数选取的一般原则和液压系统的模型的数据可知: 线性控制器Φni和非线性控制器Φfi相应参数:[λ1i,λ2i,λ3i]T=:[1,3,3]T,ωc=285,λsi=5。
用普通的PID 控制器来比较本文控制方案的合理性和有效性:
式中:Ts—控制周期,本文设0.001s。
4 计算结果分析对比
4.1 油缸的位置跟踪图结果分析
油缸的位置跟踪图结果分析,见图4。
图4 油缸位置跟踪图Fig.4 Cylinder position tracking
4.2 比例伺服阀的阀芯位移图结果分析
比例伺服阀的阀芯位移图结果分析,见图5。
图5 比例伺服阀的阀芯位移图Fig. 5 Proportional servo valve core displacement diagram
4.3 双缸同步跟踪误差图结果分析
双缸同步跟踪误差图结果分析,见图6。
图6 双缸同步跟踪误差图Fig.6 Dual cylinder synchronous tracking Error Diagram
通过测试及结果分析,ωc越大,单个油缸的位置跟踪误差收敛速度提高;λsi越大, 液压双缸的同步跟踪误差越小。
5 结论
本文利用位移传感器得到的期望位置与实际位置偏差的位置偏差信号,以及油缸的速度、加速度、急动度数据和比例伺服阀的阀芯位移信号构造同步控制器, 并且对油液压力和系统负载以及不确定的系统动力学等影响同步跟踪精度的参数进行预估和补偿; 在运动控制器中增加同步控制算法研究以及通过增加控制方程因子避免振动,在控制方程中添加二阶导数增益项来补偿系统的弹性,避免了振荡问题。 通过实际系统测试,证明了智能RMC70运动控制器在双缸液压实验系统优化中的有效性。
