国产化架控制动系统设计与产品介绍
2021-06-22张鹏飞李增辉
葛 永, 贺 成, 张鹏飞, 李增辉
(南京中车浦镇海泰制动设备有限公司, 江苏 南京 211800)
0 引言
徐州地铁1 号线列车制动系统采用南京海泰公司自主设计研发的EPBD-1 型架控制动系统,该制动系统具有常用制动、快速制动、紧急制动、停放制动、保持制动、电空混合制动、载荷补偿、防滑控制、空压机管理、轮径修正和踏面清扫等功能[2]。系统以故障导向安全为设计原则[3],具有制动管理灵活、制动响应快、产品集成化程度高、重量轻、安装便利等特点[4]。
1 制动系统产品
EPBD-1 型架控制动系统主要产品包括供风装置、制动控制单元、辅助控制装置和基础制动装置等。
1.1 供风装置
供风装置是一种为列车制动系统或其他用风产品提供洁净的压缩空气的产品,一般安装在拖车下。每列配置2 台供风装置,采用主辅工作方式,分正常、辅助、强泵风三种工作模式。
徐州地铁1 号线列车制动系统供风装置选用的是南京海泰公司的S03T-N0.9A 型螺杆式供风装置(见图1),该供风装置主要由空气压缩机、前置过滤系统、空气干燥系统、 压力开关箱等模块组成。
S03T-N0.9A 供风装置气路原理图如图2所示, 空气压缩机系统作用是将吸入的空气进行压缩, 前置过滤系统作用是将压缩空气中的饱和水蒸气、油雾及固体杂质滤除,空气干燥系统作用是再次过滤压缩空气中的水分, 压力开关箱内部件可进行压力值监测, 发送压力信号至MVB 列车网络,MVB 列车网络根据接收到的压力值判定空压机是否需要启动。
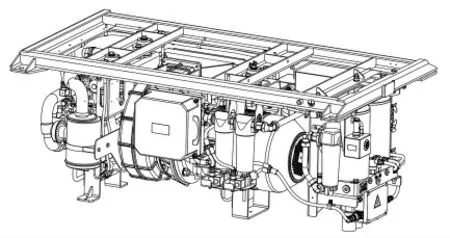
图1 S03T-N0.9A 供风装置

图2 S03T-N0.9A 供风装置气路原理图
1.2 制动控制单元
制动控制单元作为制动系统的关键产品, 主要由气动制动控制模块和电子制动控制模块组成。 电子制动控制模块作为制动系统的“大脑”,具有制动力运算、控制及管理等功能。 气动制动控制模块负责将接收到的电子制动控制模块电气制动指令转换成空气制动指令, 经过空气制动指令调控后的压缩空气作为基础制动装置执行制动的动力源。 制动系统通过制动控制单元实现其功能。
徐州地铁1 号线列车制动系统制动控制单元选用的是南京海泰公司的EPBD-1 型制动控制单元(见图3)。
EPBD-1 型制动控制单元主要由电子制动控制单元(EBCU)、气动制动控制单元(PBCU)和护箱等组成。 EPBD-1 型制动控制单元的气路原理 (见图4)。EBCU 通 过 列 车MVB 网络、CAN 制动内网和维护以太网进行信息交互,可以根据接收到车辆指令,控制PBCU动作。PBCU 主要由电子称重阀、EP 气动阀、缓限气动阀、连接气动阀、过滤器、压力采集模块和集成气路板组成。

图3 EPBD-1 型制动控制单元

图4 EPBD-1 型制动控制单元气路原理图
1.3 辅助控制装置
在架控制动控制系统中, 辅助控制装置主要用于进行停放制动控制、 空簧供风控制、 制动供风控制和压力测试。
徐州地铁1 号线列车制动控制系统辅助控制装置采用的是南京海泰公司的ACU-20 辅助控制装置(见图5)。 ACU-20辅助控制装置气路原理如图6 所示。
ACU-20 辅助控制装置主要由辅助控制单元、 护箱、吊架和风缸模块等组成。 吊架用于辅助控制装置内各模块的整体集成与车辆吊装。护箱用于对辅助控制单元进行防护。 风缸模块由总风缸、制动风缸和空簧风缸组成, 用于在供风装置停机时进行压缩空气储存。辅助控制单元主要有减压阀、塞门、溢流阀、过滤器、双向阀、制动电磁阀、压力开关、止回阀、测试插座和集成气路版组成。
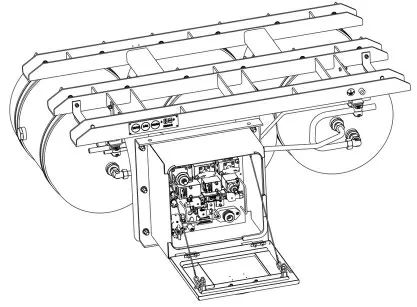
图5 ACU-20 辅助控制装置

图6 ACU-20 辅助控制装置气路原理图
1.4 基础制动装置
基础制动装置作为制动系统的制动执行部件, 是一种能将空气压力转换成摩擦制动力的产品。
徐州地铁1 号线列车制动控制系统基础制动装置采用的是南京海泰公司的TW-PLE-10D 型踏面制动单元(见图7)和TW-XLE-10X 型踏面制动单元(见图8),其中TW-PLE-10D 型踏面制动单元为带停放功能踏面制动单元, 可以实现满员状态下最大坡度40‰的列车停放。
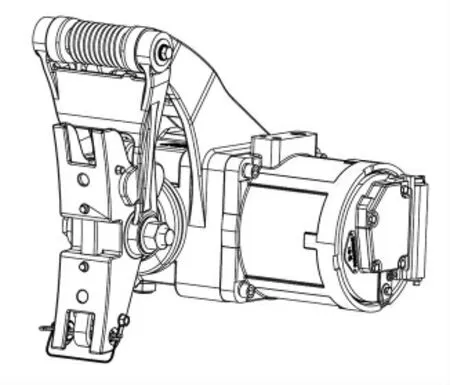
图7 TW-PLE-10D 型踏面制动单元
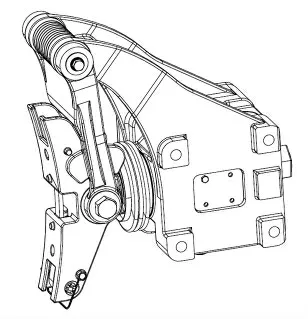
图8 TW-XLE-10X 型踏面制动单元
列车每根轴配置1 台TWPLE-10D 型踏面制动单元和1 台TW-XLE-10X 型踏面制动单元, 安装时以转向架为单位进行对角分布(见图9)。 TW-PLE-10D 型踏面制动单元配置的两根手动缓解拉绳安装于车辆两侧, 司勤人员在列车任意侧均可进行手动停放制动缓解操作。

图9 踏面制动单元分布示意图
2 制动系统功能
徐州地铁1 号线列车制动控制系统采用的网络结构为高实用性网络结构(如图10 所示),该网络结构由MVB 列车网络、CAN 制动内网和维护以太网组成。 制动系统通过MVB 列车网络进行信息采集、 指令接收和故障上传等。 每三辆车的制动控制单元组成一组CAN 制动内网,每组内网中包括2 套EPBD-10A 制动控制单元和4套EPBD-11A 制动控制单元。 制动控制单元可通过CAN 制动内网实现制动信息传输、制动力管理、故障诊断等功能。整列车的制动控制单元通过以太网交换机组成维护以太网,可通过以太网交换机实现制动状态传输、故障诊断与存储、程序下载与烧录等功能。
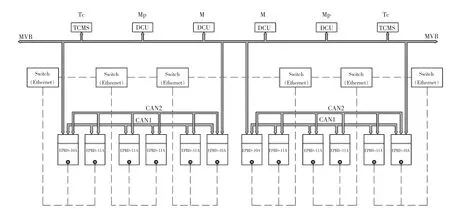
图10 高实用性网络结构示意图
2.1 常用制动
ATO 自动驾驶模式中,列车在ATC 系统的控制监护下进行自动驾驶。当需要进行列车制动时,ATC 将制动力需求数据上传网络,经过解析后通过MVB 列车网络发送给EPBD-10A 制动控制单元,EPBD-10A 制动控制单元根据制动力需求进行整车制动力计算和分配。
人工驾驶模式中, 司机操作主司控器手柄进行常用制动级位控制,司控器将制动级位上传网络,经过解析后通过MVB 列车网络发送给EPBD-10A 制动控制单元,EPBD-10A 制动控制单元根据制动力需求进行整车制动力计算和分配。
EPBD-10A 制动控制单元将计算出的整车制动力值与从DCU 接收到的每车电制动状态信息和电制动力进行核算,将核算后的制动力值平均分配到每个动车。待动车转向架达到粘着极限后, 把剩余空气制动力平均分配到每个拖车转向架。
当列车速度较低时(≤5km/h),电制动作用将越来越小,MVB 列车网络会发送电制动淡出信号给EPBD-10A制动控制单元, 经过一定时间的延时处理后,EPBD-10A制动控制单元进行纯空气制动力计算和管理。
2.2 快速制动
当司机将主司控器手柄拉到“快速制动”级位时,列车将以与紧急制动相同的减速度实施电空制动。 但快速制动不同于紧急制动, 快速制动可通过恢复手柄位置至零位进行快速制动缓解, 并且快速制动要求冲击率≤0.75m/s3。
正常模式下,快速制动的制动模式为电空混合制动。快速制动时列车所需的总制动力由制动控制单元计算和管理,优先使用100%的电制动力,当电制动力不足时,进行空气制动力补偿。
紧急牵引模式下,快速制动为纯空气制动, 每组CAN 制动内网中,EPBD-10A 制动控制单元负责将计算后的制动力值平均分配到该单元所在的转向架上。此时的快速制动通过硬线进行控制。
在ATO 模式下触发快速制动,牵引控制单元(DCU)和制动控制单元将忽略来自ATO 的制动力需求,按快速制动率执行制动。
2.3 紧急制动
紧急制动由列车的紧急制动环路失电触发,属于纯空气制动。作为列车运行安全保证中最重要的功能,紧急制动设置于故障安全环路。紧急制动不受列车冲击极限限制。
紧急制动采用硬线控制, 在制动控制单元上配置了由列车安全环路硬线控制的紧急制动部分。 若列车安全环线断开,将立即触发紧急制动。
不同于快速制动,紧急制动的施加是不可逆的,仅当所有紧急制动触发条件都消失, 且列车零速时紧急制动才能被缓解。
2.4 停放制动
停放制动通过基础制动装置中的弹簧施加, 当停放回路空气压力小于弹簧力时, 基础制动装置通过弹簧力施加停放制动。当停放回路中空气压力大于弹簧力时,空气压力抵消施加的弹簧力,实现基停放制动缓解。
在列车零速状态下, 司机可以通过司机室的停放施加/缓解按钮进行停放制动控制。 停车状态下,也可以操作辅助控制单元内的停放隔塞门实现停放制动和施加。此外,当停放回路压力不足时,停放制动将通过弹簧自动施加。
2.5 保持制动
保持制动是常用制动的一部分, 主要用于防止车辆在坡道上启动时发生溜车。
在ATO 模式下, 保持制动施加指令由ATO 发送给MVB 列车网络, 保持制动缓解指令由VCU 发送给MVB列车网络。 EPBD-10A 制动控制单元接收到保持制动指令后,控制基础制动装置进行保持制动施加和缓解。
在紧急牵引模式下, 列车的保持制动施加与缓解由EPBD-10A 制动控制单元控制,将不再接收MVB 列车网络保持制动施加或缓解指令。
2.6 电空混合制动
列车的制动力分配是按 “列车级” 进行制动力分配的。电空混合制动模式为优先采用电制动、空气制动补偿的制动模式。
电空混合制动仅在网络正常情况下起效, 在发生网络故障后,列车进行紧急牵引时,采用纯空气制动进行列车制动。
2.7 载荷补偿
制动控制单元实时采集转向架上空气弹簧的压力信号。压力信号经制动控制单元转换计算后,将转换为此转向架的载荷信号,供载荷补偿时使用。
每辆车有4 个空气弹簧压力检测点, 当监测到某个空气弹簧故障(压力值超出正常范围)时,进行载荷补偿。具体由以下三种载荷补偿模式:
(1)当某转向架的单个空气弹簧压力点故障时,以同一转向架另一个空气弹簧压力作为载荷压力。
(2)当某转向架的两个空气弹簧压力点全故障时,该转向架将以本辆车另一个转向架的空气弹簧压力作为载荷压力。
(3)当某辆车四个空气弹簧压力点都故障,载荷压力默认选取AW3 对应空气弹簧压力。
2.8 防滑控制
列车的电制动防滑控制和空气制动防滑控制是各自独立完成的,具体实现方式如下:
(1) 当电制动检测到滑行时发出电制动防滑信号给制动控制系统, 制动控制系统根据此信号固定当前实际电制动力值。
(2)当电制动防滑信号有效超过2s 时,制动控制系统将发送电制动切除信号给MVB 列车网络,网络转发此电制动切除信号给牵引系统。
(3)当制动控制系统检测到滑行,制动控制系统将在1s 内发送电制动切除信号给MVB 列车网络,网络转发电制动切除信号给牵引系统。
(4)当制动控制系统检测到严重滑行,制动控制系统将在0.5s 内发送电制动切除信号给列车网络, 网络转发电制动切除信号给牵引系统。
在电制动切除的过程中存在电空混合制动, 以确保车辆冲击率不大于0.75m/s3。
2.9 空压机控制
制动控制系统的两台供风装置分为主空压机和辅空压机, 其中主辅空压机由Tc 车的EPBD-10A 制动控制单元指定。 EPBD-10A 制动控制单元根据VCU 发送的时间信号指定此时的主辅空压机,并根据EPBD-11A 制动控制单元采集主风缸压力值判定是否进行空压机启动控制。
主辅空压机控制策略如下:
(1)列车网络正常模式下,当主风缸的压力值低于750 kPa 时控制主空压机启动; 当主风缸的压力值达到900 kPa 时,控制主空压机停止;
(2)列车网络正常模式下,当主风缸的压力值低于700 kPa 时,主、辅空压机同时启动,当主风缸的压力值达到900 kPa 时,两台空压机都停止。
(3)当列车网络故障或在紧急牵引模式下,制动系统默认使用Tc1 车的空压机为主空压机,Tc2 车的空压机为辅空压机,控制策略同网络正常模式。
(4)当Tc 车EPBD-10A 故障时,空压机可通过内置的总风压力开关通断来控制启停, 控制压力同网络正常模式。
(5)在司机台设置有强迫泵风按钮,任何时候操作此按钮,本车的空压机均会启动。
2.10 轮径修正
列车网络在DDU 中设置每车3 轴轮径为轮径参考值, 并通过VCU 发送给EPBD-10A 制动控制单元,EPBD-10A 制动控制单元根据此轮径参考值进行防滑控制等。
当列车处于惰行(至少持续5s,速度大于20km/h)且CAN 制动内网中的制动控制单元没有检测到列车滑行时,制动控制系统将进行轮径校正。
3 结束语
目前,设计的共计23 列的徐州地铁1 号线制动系统已完成所有试验并全部交付运营。 该制动系统已运营18月, 系统运行情况良好, 系统性能可以与进口系统相角逐。目前已相继获得合肥、常州、杭州、南京、南通、绍兴等城市订单, 对我国城市轨道交通制动产品的健康发展起到了重要的促进作用。
架控制动系统已经实现自主化, 但部分核心部件仍依赖进口,如高速开关电磁阀、传感器、电子芯片、高强度紧固件、压力开关等,导致国产化架控制动控制系统仍然会受到全球贸易环境及供应链安全的影响, 存在一定的隐患, 不利于国产化架控制动系统的长期健康发展。 因此, 攻关核心部件实现完全自主化是国产化架控制动系统发展的重要任务, 也是国内城市轨道交通产品的健康发展的必经之路。
