基于混合交通的转弯交通流模型
2021-06-22谷晓磊周伊佳
谷晓磊,周伊佳
(大连东软信息学院 计算机与软件学院,辽宁 大连 116023)
0 引言
在道路行驶过程中,自动驾驶汽车的转弯行为是必不可少的。研究自动驾驶汽车在转弯时的车辆跟驰决策和分析路口几何特征,可提高自动驾驶汽车转弯行驶的通过效率,对车辆跟驰效果的影响显得尤为重要。M. BANDO等人于1995年通过车辆间距优化速度函数来表示车辆跟驰特性,并建立了最优速度模型(optimal velocity model,OV);D. HELBING等人运用道路测量数据进行了OV模型辨识,得出了该模型在变速过程中不合实际的结论,所以改进提出了广义力模型(generalized force model,CFM)。
在前人研究的基础上,本文基于混合交通流的弯道跟驰模型,对自动驾驶汽车和手动驾驶汽车的混合交通流进行分析,建立了转弯换道规则和相应的三车道转弯交通流模型,并通过仿真实验,研究了自动驾驶汽车在不同比例下对道路通行效率的影响。在转弯过程中,自动驾驶汽车运用转弯交通流模型,对行程路线进行预判,驶入下一个路口转弯时可行的对应车道。在自动驾驶车辆比例少于一半时,通行时间远小于自动驾驶车辆运用弯道跟驰模型及自动驾驶车辆换道决策模型的通行总时间,可以大大减少在直行道路中变道所花费的时间,提高交通效率,并使用Python编程语言中的MATLAB函数绘制图像。
1 弯道跟驰模型
1.1 模型假设
假设1:所采集的数据真实可靠
假设2:道路车辆只有机动车辆
假设3:无其他不可抗力因素
假设4:自动驾驶汽车的数量符合道路车辆密度分布情况
假设5:自动驾驶车辆不在道路中停下离开车
假设6:道路中不存在堵车现象
1.2 模型建立
1995年,M.BANDO等人[1-5]建立了车辆跟驰过程中的优化速度函数,认为后车以趋向前车速度来执行变速行为,建立了弯道跟驰模型。
动力学方程如下:



其中vm为最大行驶速度,h0为安全车距。
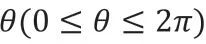

图1 弯道结构示意




其中R×θ0为安全车距。
2 转弯交通流模型
本文所提出的转弯交通流模型,在转弯时自动驾驶汽车根据设定好的行驶路线,提前进入相应的车道,减少了自动驾驶汽车在直行交通流中的变道行为,如图2所示。模型的假设条件包含假设1-6,且假设正前方道路中向左转弯的车辆全部进入最右侧车道。
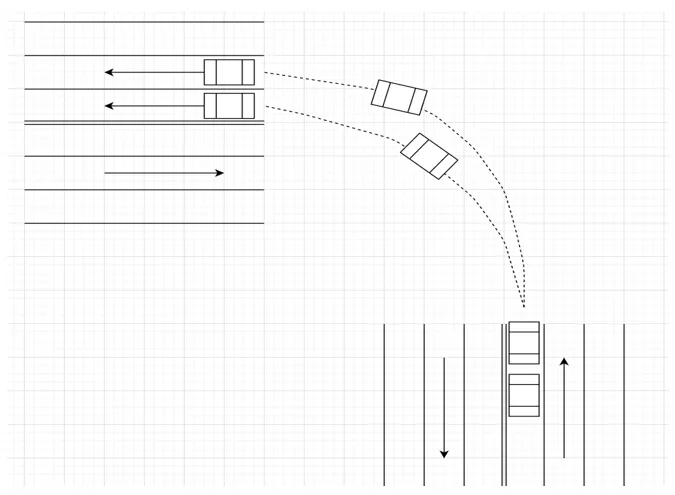
图2 弯道转弯模拟
基于混合交通流的转弯变道模型,当自动驾驶汽车在面临路口要进行左转弯时,提前进入相应的车道。对应规则为:假如该车辆在下一个路口需要左转弯就行驶入最左侧车道,假如该车辆在下一个路口需要直行、右转,则行驶入中间车道。自动驾驶汽车提前行驶入相应的车道后,在直行车道中会减少自动驾驶汽车的变道行为,以此提高混合交通流的通行效率。
结合上文弯道跟驰模型中的动力学条件,改变动力学公式中弯道半径R的取值,由原来的11.5m改为14m,可得到车辆驶入中间车道时的最大线速度和最优角速度以及最优速度函数中的最终结果。
3 数值实验
基于三车道转弯交通流模型,选取车流密度为10%,进行仿真实验。仿真结果如下:
3.1 平均速度
通过改变道路上自动驾驶汽车的比例,研究对道路车辆平均速度所产生的影响,如图3所示。随着自动驾驶汽车的比例增加,三车道的转弯交通流中车辆的平均速度逐渐提高。这是因为自动驾驶车辆间只需要极短的安全距离,几乎不需要反应时间,更重要的是自动驾驶车只要满足换道条件就会换道行驶,从而提高了车辆在路口转弯行为过程中的平均速度。
3.2 交通流量
通过改变道路上自动驾驶汽车的比例,研究对路口的交通流量的影响,如图4所示。随着自动驾驶汽车的比例增加,三车道的转弯交通流中车辆的交通流量逐渐提高。此结论与图3中平均速度的研究结果相吻合,车辆随平均速度提高而交通流量随之上升。
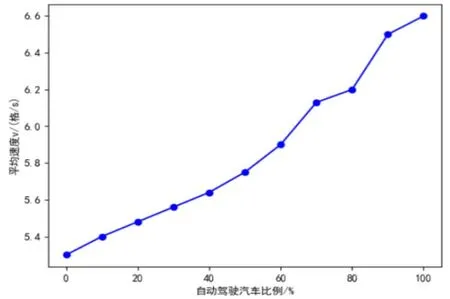
图3 道路车辆的平均速度的变化
图4 交通流量的变化
3.3 时间速度方差
通过改变道路上自动驾驶汽车的比例,研究对时间速度方差的影响,如图5所示。随着自动驾驶汽车的比例增加,三车道的转弯交通流中车辆的时间速度方差逐渐下降。当加入的自动驾驶汽车较少时,会打乱道路上手动驾驶汽车的速度节奏,所需时间会一开始增大;当道路上自动驾驶汽车比较多时,自动驾驶汽车所需安全距离小,时间速度方差开始下降,自动驾驶汽车会很好地遵守变道规则,只要满足条件就会变速及变道,因此道路交通流会变得稳定。

图5 时间速度方差的变化
3.4 变道次数
通过改变道路上自动驾驶汽车的比例,研究车辆变道次数的影响,如图6所示。随着自动驾驶汽车的比例增加,三车道的转弯交通流中汽车的变道次数逐渐下降。主要原因是自动驾驶汽车一开始不多时,与不太规范的手动驾驶汽车的驾驶行为相冲突,并没有明显的减缓效果,等自动驾驶汽车超过80%以上,此时道路上几乎全部为自动驾驶汽车,车辆严格按照规则进行行驶变速及变道,因此变道次数急剧下降,道路交通流变得稳定。

图6 变道次数的变化
3.5 总时间比较
利用转弯交通流模型与弯道跟驰模型和自动驾驶车辆换道决策模型[8]比较。利用三车道转弯交通流模型中的自动驾驶汽车所花费的时间,与运用弯道跟驰模型和自动驾驶车辆换道决策模型的自动驾驶车辆在转弯和直行换道过程中花费的总时间,两个时间长度进行比较,如图7所示。
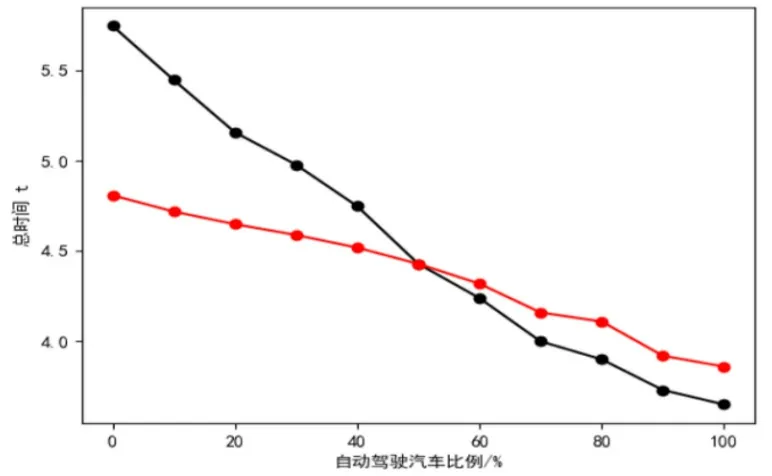
图7 总时间的变化
图中说明:黑线代表弯道跟驰模型和自动驾驶车辆换道决策模型的自动驾驶车辆在转弯和直行换道过程中花费的总时间;红线代表转弯交通流模型中的自动驾驶汽车所花费的时间。
利用Python编程语言中的MATLAB函数进行数据比较的可视化,根据折线图可以看出自动驾驶汽车在道路中的比例小于一半时,运用转弯交通流模型可以大大节约通行时间,从而提高混合交通流的交通效率。
4 结语
在如今人工智能的发展仍然处于萌芽状态的时代下,自动驾驶汽车刚刚兴起,道路中的自动驾驶汽车占比较低。本文主要考虑了城市道路中的三车道混合交通流,在弯道跟驰模型的基础上,改进了混合交通流中自动驾驶汽车的转弯变道规则,得到了转弯交通流模型。通过改变弯道跟驰模型动力学条件中的弯道半径R的取值,得到新的最大线速度、最优角速度和最优速度数值。虽然在转弯过程中,改进后要比改进前需要多花费较多时间,但是运用改进后的模型,可提前进入相应车道,减少了直行道路中的变道行为,减少了变道时间。综合比较来看,整个通行时间明显减少,不仅提高了混合交通流的通行效率,另一方面还可以降低直行道路中因变道而产生的安全隐患。
