无地面控制点无人机影像空三定位精度分析
2021-06-21肖苏勇
肖 苏 勇
(中铁第四勘察设计院集团有限公司,湖北 武汉 430063)
0 引 言
无人机低空遥感技术作为卫星遥感和航空遥感的补充,成为全球遥感对地观测系统的数据获取重要手段之一。近年来,随着消费级无人机的普及和影像匹配技术的进步,无人机低空遥感技术发展火热,广泛应用于测绘4D产品生产、智慧城市、林业调查、农业植保、灾害监测等方面[1-3]。空三加密作为无人机影像后处理的关键步骤之一,为后续生产提供高精度的外方位元素,直接决定了测绘数字成果生成的质量。在传统的航测外业作业中,需要根据成图比例尺、地面分辨率、测区地形特点、摄区的实际划分等情况布设大量的野外像控点,费时费力[3]。得益于网络RTK技术(如CORS系统、千寻位置服务)和PPK技术在无人机外业数据获取上的应用,能够获取优于10 cm的影像曝光点位置信息。尤其是随着带RTK的消费级无人机产品的推出,使得高精度位置信息的无人机影像数据获取成本越来越低,为无地面控制点(简称无地控)的影像空三研究提供了可能[5-10]。
传统的影像空三主要是在大量特征匹配点的情况下,利用控制点作为约束条件,解决影像定向和地面加密点计算的问题。通常情况下,当区域网平差过程中没有控制点时,平差解算是秩亏的。因此,若想进行无地面控制点影像空三,需要添加其他附加约束条件(通过将外方位元素当作带权观测值进行约束)来解决影像外方位元素和地面连接点三维坐标解算的问题。与传统的影像空三相比,无地面控制点影像空三在数学模型上基本一致,其主要不同点在于控制点不作为带权观测值参与平差,而采用带附加参数的自检校区域网平差,将自检校参数、外方位元素视为带权观测值。平差的基本误差方程为:
(1)
式中:X1为外方位元素和加密点坐标的改正数向量;P1为像点观测值的权;X2为外方位元素的改正数向量;P2为外方位元素观测值的权;X3为相机自检校参数的改正数向量;P3为相机自检校参数观测值的权;A1、A2、A3为对应误差方程式的系数矩阵;E1、E2为单位阵;L1、L2、L3为对应误差方程式观测值向量。式(1)可简化为:
V=AX-L,P
(2)
法方程为:
(ATPA)X=ATPL
(3)
无地控影像空三技术是目前国内外学者和行业相关人员研究和关注的热点之一,其能够有效减少外业像控点的数量,提高外业作业效率。笔者对影响无地控影像空三定位精度的主要影响因素进行了列举,并利用无人机实测数据进行了详细分析,给出了无地控影像空三实现的工程实践建议。
1 无地控影像空三试验与分析
1.1 试验数据集
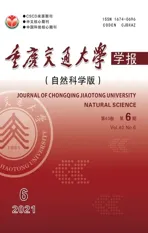
选用大疆精灵4 RTK无人机丹江口1∶500测图影像数据进行无地面控制点影像空三试验。数据集相关描述信息如下:航线为9条,影像数目为889张,地面分辨率为4 cm,航向重叠度为90%,旁向重叠度为75%,布设并测量了104个检查点(15个平高点,89个高程点),测区概况如图1。采用千寻位置服务,因其能够提供优于10 cm的外方位线元素定位精度。
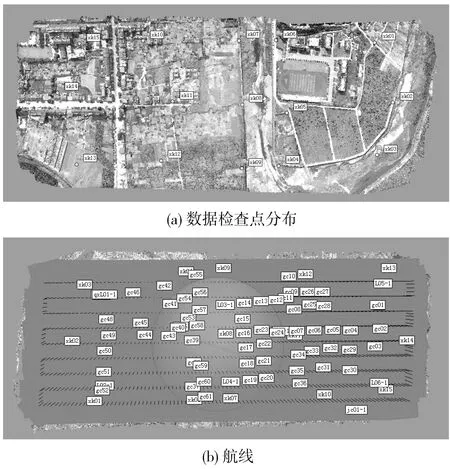
图1 丹江口1∶500地形图数据检查点分布和航线情况Fig.1 Distribution of data checkpoints and routes in 1∶500 scale topographic map of Danjiangkou
1.2 无地控影像空三影响因素分析
结合航空影像成像原理和飞行控制参数设置情况,确定了无地面控制点航空影像空三的精度影响因素:重叠度与倾斜角、相机模型、外方位线元素精度与权值、外方位角元素精度与权值。利用模拟数据和无人机实测数据,通过PhotoScan软件对上述影响因素进行了试验分析。由于影像空三的定位精度与影像的地面分辨率(GSD)直接相关,因此笔者在同等地面分辨率情况下对上述影响因素进行讨论。
1.2.1 重叠度与倾斜角
选择市场上常见的3款小像幅、中等像幅和大像幅相机参数,相机配置采用Maltese-Cross方式,通过模拟飞行参数并将物方点反投影至每张影像生成像点观测值,通过求解区域网平差中的协方差矩阵来估计物方点多片前方交会的先验精度。物方点坐标由测区范围随机生成(视为真值)。依据共线条件方程,设置重叠度、倾斜角模拟曝光点的像片位置和姿态(加入随机扰动,外方位线元素的精度设为0.1 m,外方位角元素的精度设为0.001°),并计算物方点在各影像上的像点坐标(加入随机扰动,像点观测值的精度设为1个像素)。将物方点坐标、影像外方位元素作为未知参数,构建区域网平差的误差方程。模拟实验选用的3款相机参数如表1,地面分辨率为12 cm,不同相机根据地面分辨率调整对应的飞行高度。
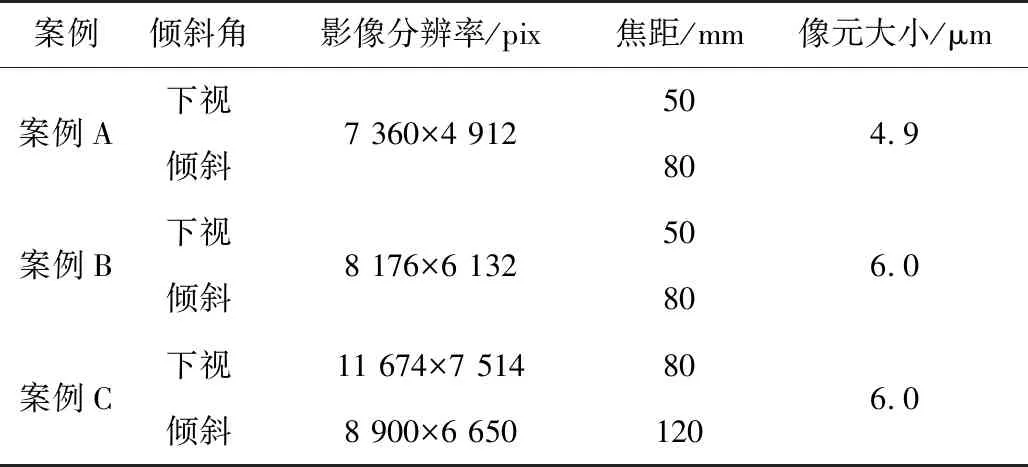
表1 倾斜摄影测量定位精度分析模拟试验相机参数Table 1 Positioning accuracy analysis of oblique photogrammetry simulation test camera parameters
分别对3种相机配置方案,根据区域网平差法方程的逆模拟航向、旁向重叠度分别为60/40、80/60、80/80、90/90和倾斜角分别为下视(Nadir)、30°、45°情况下物方点的先验定位精度。为了比较倾斜摄影测量与传统垂直摄影的区别,同时给出了垂直摄影模式下的定位精度,结果如图2。

图2 倾斜摄影测量重叠度、倾斜角对定位精度的影响Fig.2 The influence of overlap ratio and oblique angle of oblique photogrammetry on positioning accuracy
由图2可以看出,随着航向重叠度或旁向重叠度的增加,不同倾斜角的情况下定位精度均得到了有效提升。当倾斜角为30°时,物方点水平方向的定位精度约为高程方向的2倍;当倾斜角为45°时,物方点的整体定位精度均得到提高,且高程方向提升更显著,高程方向与水平方向的精度接近一致。相比传统的垂直摄影,倾斜摄影测量带来了两个方向的提升:①由于冗余观测值的加入,物方点的定位精度约为传统垂直摄影的2倍;②由于大交会角立体像对的引入,高程方向精度得到了显著提升,且精度与水平方向趋于一致。
1.2.2 相机模型
利用实测丹江口数据集进行试验,通过对自检校区域网平差模型的不同参数标定配置,分析相机模型对无地面控制点影像空三定位精度的影响,如图3。按照自检校参数的不同,按照以下5种方案进行试验:①f,cx,cy,k1,k2;②f,cx,cy,k1,k2,k3,k4;③f,cx,cy,k1,k2,k3,k4,p1,p2;④f,cx,cy,k1,k2,k3,k4,p1,p2,b1,b2;⑤f,cx,cy,k1,k2,k3,k4,p1,p2,p3,p4,b1,b2。
由图3可以看出:
图3 相机自检校模型对定位精度影响Fig.3 Influence of camera self-calibration model on positioning accuracy
1)当自检校相机模型仅考虑径向模型(k1,k2,k3,k4)时,无地面控制点平差结果收敛较差,检查点误差大于1 m。这是由于相机的畸变模型欠拟合,无法拟合真实的畸变情况。
2)当自检校相机模型同时考虑径向畸变参数(k1,k2,k3,k4)和切向畸变参数前两项(p1,p2)时,无地面控制点平差收敛结果得到显著提升。
3)当自检校相机模型同时考虑径向畸变参数(k1,k2,k3,k4)、切向畸变参数前两项(p1,p2)和正交畸变参数(b1,b2)时,无地面控制点平差获得最优的收敛结果。
4)当继续增加切向畸变参数(p3,p4)时,无地面控制点平差精度反而出现细微降低,笔者推测此为相机模型过拟合造成。
因此,针对DJI 4RTK无人机的相机进行无地面控制点空三时,建议自检校相机模型选择方案④。
1.2.3 外方位线元素的精度
利用实测丹江口数据集进行试验,将最佳配置参数的平差结果作为外方位元素真值,不采用外方位角元素(初值为0),并通过对外方位线元素真值添加指定标准差的随机扰动分析外方位线元素精度对定位精度的影响,如图4。外方位线元素的权值(设置标准差)取实际精度。

图4 外方位线元素实际精度对定位精度影响Fig.4 Influence of actual accuracy of exterior line elements on positioning accuracy
由图4可以得出:
1)当外方位线元素实际精度(标准差)小于等于1.0 m时,无地面控制点空三均能收敛至较好的结果(13 cm左右)。这是由于区域网平差在一定程度上将偶然误差消除掉。
2)当外方位元素实际精度(标准差)大于等于1.0 m时,随着实际标准差的增大,即外方位线元素定位精度越来越差,无地面控制点空三的定位精度也越来越差。
因此,当外方位线元素能够获取优于1 m精度的初值时,无地面控制点空三的精度均可收敛至较好的结果。需要注意的是,上述模拟数据是在不存在系统误差的情况下对真值添加1 m的随机误差。实际情况中,如果外方位元素中存在系统误差,则需要先消除系统误差后再进行无地面控制点空三处理。现有的RTK技术、PPK后处理技术均可以获取优于10 cm的定位结果,这为无地面控制点空三提供了可能。
1.2.4 外方位角元素的精度
利用实测丹江口数据集进行试验,将最佳配置参数的平差结果作为外方位元素真值,对外方位线元素添加10 m的随机误差,并通过对外方位角元素真值添加指定标准差的随机扰动分析外方位角元素精度对定位精度影响,如图5。

图5 外方位角元素实际精度对定位精度影响Fig.5 Influence of actual accuracy of exterior azimuth elements on positioning accuracy
由图5可以得出:
1)当外方位角元素精度优于0.1°时,其对无地面控制点空三的结果有一定的改善作用(定位精度约为0.3 m,而无高精度角元素初值时定位精度约为0.8 m)。
2)当外方位角元素精度大于0.1°时,其对无地面控制点空三的结果不仅没有贡献,还会降低空三的定位精度(约为4~5 m)。这是因为当外方位线元素含有误差时,很小的角误差就会引起较大的定位误差,即误差会放大。
因此,当外方位角元素初值精度不高时,在无地面控制点空三时可以无需对角元素进行加权。现实应用中,高精度的IMU设备往往非常昂贵,仅在机载LiDAR等项目应用上才会使用。无人机上的IMU往往比较廉价,因此外方位角元素精度一般较低。
1.2.5 外方位线元素的权值
利用实测丹江口数据集进行试验,采用方案④自检校相机模型(f,cx,cy,k1,k2,k3,k4,b1,b2,p1,p2)进行试验,在PhotoScan软件中通过改变外方位线元素的标准差来验证其对定位精度的影响,如图6。
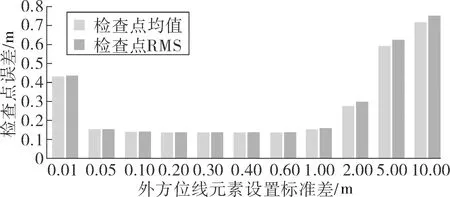
图6 外方位线元素权值对定位精度影响分析Fig.6 The influence of exterior line elements weight on positioning accuracy
由图6可以得出:
1)当外方位线元素标准差与实际精度相符时(约 0.1 m),检查点含有最高的定位精度。该标准差允许在一定的设置范围(0.05~1.0 m)内均可以获取较好的定位精度。
2)当外方位线元素标准差值偏离实际精度越来越大时,外方位线元素的权值越来越小(约束减弱),检查点的定位精度越来越差。
3)当外方位线元素标准差偏离实际精度越来越小时,外方位线元素的权值越来越大,平差过程中初值权值过大导致无法收敛到正确结果,检查点的定位精度也越来越差。
1.2.6 外方位角元素的权值
一方面,当外方位线元素精度较差时,高精度的外方位角元素亦无意义,无法获得高精度的无地面控制点定位精度。另一方面,当外方位线元素精度较高时,低精度外方位角元素对空三结果已无贡献,可忽略。因此,需在高精度外方位线元素(0.1 m)和高精度外方位角元素(0.01°)情况下(通常的大型机载设备GPS/IMU能达到的精度),讨论外方位角元素的权值对定位精度是否有影响,如图7。

图7 外范围角元素权值对定位精度影响Fig.7 The influence of exterior azimuth element weight on positioning accuracy
由图7可以得出:当外方位角元素的权值过大时,无地面控制点的空三结果反而会下降;当外方位角元素的权值大于实际精度时,外方位角元素的权值对无地面控制点的空三定位精度已无贡献。因此,在实际的无地面控制点空三过程中,仅需赋予外方位角元素的权值一个较大值即可,其不影响无地面控制点的空三结果。
1.3 精度评定
DJI 4RTK无人机丹江口数据集的空三检查点统计结果如表2。表2中:15个检查点的空三定位误差为0.138 m,78个高程点中误差为0.07 m,满足航测内业规范要求。无地控无人机影像空三的定位误差约为GSD的3倍左右,符合1.2.1节所给出的结论。结果表明,无地控影像空三具有可行性。

表2 DJI4 RTK无人机垂直下视丹江口数据集平差结果(平高点)Table 2 DJI4 RTK UAV vertical downward looking Danjiangkou data set adjustment results (flat high point)
利用无地面控制点影像空三结果进行正射影像生成,与内业立体测图成果叠加显示如图8。

图8 无地面控制点影像空三生成的DOM与立体测图DLG叠加显示Fig.8 Overlay display of DOM and DLG in aerial triangulation without ground control point image
从图8可以看出,无地面控制点空三的DOM成果与传统立体测图成果套合很准确,进一步验证了无地面控制点影像空三的有效性。
2 无地控无人机影像空三工程建议
无地控无人机影像空三的实现取决于合适的飞行参数设置、高精度的外方位元素获取、最优的空三后处理解算和顾及高程异常改正。
2.1 合适的飞行参数设置
无地控无人机影像空三要想达到最高的精度,需要根据实际航飞要求进行飞行参数设置。不考虑其他因素影响,空三定位的精度与影像地面分辨率(GSD)成正相关,即:地面分辨率越高,空三定位精度越高。要想获取更高的地面分辨率有如下两种方法:①航高不变时,相机采用更长的焦距;②焦距不变时,通过降低飞行高度来提高分辨率。但是降低航高的同时飞行效率下降。因此,实际应用时,考虑相机的成本和性能,根据需求选用适当的焦距和飞行高度。
在确定采用的相机型号和飞行航高后,更大的航向和旁向重叠度会带来更高的定位精度,因此实际航飞时如果条件允许应当尽量增大重叠度。由于增大航向重叠度不会影响飞行效率,而旁向重叠度的增加会增加航线数目,因此实际航飞时,建议增大航向重叠度(如增大至90%);如条件允许时,建议也尽量增大旁向重叠度(如增大至大于60%)。
当进行倾斜摄影时,倾斜角设定为45°时精度最高,同时需要考虑到街道宽度、房屋高度等信息,以便获取最高分辨率的立面纹理。
2.2 高精度外方位元素获取
通过1.2节的试验表明,角元素对空三定位结果影响不大,因为无地面控制点空三仅需要高精度的外方位线元素信息。随着GPS定位技术的发展,高精度外方位线元素获取的成本越来越低,无地面控制点影像空三可依托于网络RTK技术和PPK技术。
2.3 最优的空三解算配置
无控制点航空影像空三最优解算涉及到相机模型的选取、连接点提取配置、平差解算过程中的权值设定。
相机模型的选取会直接影响影像的外方位元素的收敛情况及精度。由2.2节的试验结论可知,采用更严密的相机模型有利于无像控空三收敛到更高的精度。在实际生产中,推荐采用Australis相机模型(f,x0,y0,k1,k2,k3,k4,p1,p2,b1,b2)。
连接点提取时,空三软件一般采用金字塔层级匹配策略,特征点提取的目标层级l决定空三的精度。当l=0时,对应于原始分辨率的影像;当l=n时,指对原始影像进行2n倍降采样;当l=-1时,即对原始影像进行升采样一次。当l越小时,特征提取的精度越高,空三解算的定位精度也越高,同时特征提取的耗时和特征点数量也增多。因此,根据实际需要,当需要获取最高的精度时,一般取l=-1或l=0;当需要获取快速空三解算结果时,一般可以选取更大的l值。
根据1.2节的试验结论,采用PhotoScan软件进行无地控无人机影像空三处理时,外方位线元素的权值应与实际精度相符合;外方位角元素对无像控空三的平差结果影响不大,取一个较大标准差即可(如2°)。
2.4 顾及高程异常改正
由于光束法平差采用的是几何交会原理,因此在严格意义上平差解算时应使用大地高。因为大地高是采用椭球面作为基准面的,而正常高或水准高是以大地水准面为基准面的,大地水准面是重力等位面,与光线传播中的几何交会没有直接联系。在进行小范围常规比例尺测图时(如1∶2 000比例尺),该区域范围内的高程异常可认为是一个常数,因此可以用水准高来代替大地高进行空三处理。在进行大范围测图、山区测图或1∶500或1∶1 000大比例尺测图时,由于高程异常变化较大或者高程异常的影响已经不可忽略,此时用水准高来进行空三处理可能会导致模型不收敛的情况,无法满足最终成果的精度要求。
此时,无地面控制点的空三处理应当采用以下策略:①先直接采用大地高进行无地面控制点空三处理,此时重建的检查点或物方点均为大地高;②对整个测区构建高程异常模型,对所有检查点和物方点进行高程异常改正,恢复为水准高成果。
3 结 论
像控点外业布设和测量是传统航空影像测图的重要环节,外业工作任务重,人力和时间成本也较高。基于无地面控制点的无人机影像空三方法能够极大程度上减轻像控外业工作量,尤其是在高山地或人烟稀少地区,可减少大量的野外像控点测量工作,极大地提高效率、节约生产成本。笔者给出了影响无地控无人机影像空三定位精度的主要因素,并利用模拟和实测数据对进行了试验与分析,最后对无地控无人机影像空三技术的应用给出了工程实践建议。研究结果对无地控无人机测图技术的推广和生产实践具有指导意义。