基于无人机热红外遥感的新疆宝安煤矿火区探测
2021-06-21张雷昕汪云甲党立波
张雷昕,汪云甲,赵 峰,原 刚,彭 斌,党立波
(1.中国矿业大学 自然资源部国土环境与灾害监测重点实验室,江苏 徐州 221116;2.中国矿业大学 环境与测绘学院,江苏 徐州 221116;3.新疆维吾尔自治区煤田灭火工程局,新疆 乌鲁木齐 830000)
地下煤火是矿井火和煤田火的总称[1]。煤的外表面和内表面吸附着氧气,产生大量的热,导致煤内温度升高并且不断累积。煤炭的温度上升到临界温度以上(通常为80~120℃)时,则会出现热失控现象,并开始逐渐自燃。煤火不但会造成煤炭资源损失,还会严重破坏生态环境。地下煤火燃烧会放出大量的热,影响地表土壤湿度,导致植被凋亡;煤火燃烧排放出大量的温室气体(如二氧化碳和甲烷),和对人类身体健康有害的有毒气体(如一氧化碳、二氧化硫、氮氧化物等)以及化学元素(砷、氟、铯、汞等),这些都对人类健康、大气环境、地表土壤、水体产生巨大的危害[2]。新疆具有十分丰富的煤炭资源,然而新疆煤炭十分容易发生自燃,致使多地发生地下煤火。每年因煤火燃烧而损失的煤炭资源达到440多万吨,且会排放1300多万吨二氧化碳,煤火威胁着约477亿t的煤炭储备资源。因此,对于煤火的及时探测及预警十分重要。
煤火燃烧时,会在磁场、热场、电场以及光场等方面[3,4]产生异常,针对这些异常,研究者们提出了不同的煤火探测方法,包括:磁探测法[5]、遥感监测法[6]、温度探测法[7]、测氡法[8]、气体探测法[9]等。这几种方法中,遥感监测法具有宏观性强,覆盖范围广,数据采集灵活等特点,具有很大的应用价值。
人类历史上首次利用热红外遥感技术对煤火进行探测是在1963年5月,美国HRB-Singer公司采用机载热感相机RECONOFAX 红外侦查系统对煤矸石煤火进行研究,经过实验分析对比证明了该技术的可行性[10];随着无人机的广泛应用,无人机遥感也逐渐显示出采集数据速度快、成本低,测量温度精度高,空间分辨率好等特点。无人机热红外遥感技术对于地表温度的获取精度更高,高分辨率也更适用于火区的圈定,这些都为煤火监测提供了新的手段和思路[11]。Wang等[12]利用无人机技术,获得具有较高分辨率(厘米级)大同煤田的图像,通过无人机携带光学相机获得图像,针对地下煤火引起的地表裂缝特点,提取煤火区地裂缝的分布信息,方便地下煤火的评估与治理,对填充裂缝和控制地下煤火有较高的参考价值;李峰等[13]在大同煤田马家梁矿区利用无人机热红外和彩色图像采集,利用夜间热图像识别煤火区的准确率达到92.78%;贾勇骁等[14]利用多架无人机集群飞行监测煤火区域,讨论了无人机续航时间短、单次监测煤火区域面积小、采集数据周期较长的问题,并且基于4G网络,提高数据传输的速度,以实现对煤火区域的高效监测;John Malos等[15]结合无人机所拍摄的热红外和可见光影像,快速检测和准确定位露天矿区的热异常水平,进行露天煤矿管理;Anna Abramowicz等[16]采用无人机热红外遥感对上西里西亚煤盆地选定的煤矸石场进行了野外调查,通过对一系列照片和测量方法在时间和空间上的比较,捕捉了煤矸石燃烧的变化趋势。
无人机热红外遥感探测技术,在煤火探测领域具有很大的发展潜力。但目前利用无人机热红外技术进行煤田火区精细化监测的研究相对较少。本研究拟采用无人机热红外遥感数据,对新疆典型煤火区昌吉市宝安矿区地下煤火进行温度探测与信息提取。对无人机热红外遥感在煤火监测方面的应用进行分析,实现小尺度煤火探测,可为煤火的预警、发现、治理、持续性监测提供新的思路与方法。
1 研究区与数据源
1.1 研究区
研究区位于昌吉市西南80km处,距宝安镇约15km,隶属昌吉市管辖。中心地理坐标:东经86°55′40.92″,北纬43°30′39.89″。该火区最早发现于1976年,起初为小煤窑井下着火,之后随着煤火的不断蔓延,持续燃烧至今。在20世纪70年代,由于小煤窑开采的不规范性,未及时处理井下煤火问题,导致煤火燃烧至地表,虽然已在2008年采取了封堵措施,但仍未能控制火势的发展。火区位于半山腰处,当地对此火区进行黄土覆盖治理,东部进行水泥边坡处理。火区西部地表存在明显的高温,地表最高温度492℃,地表温度异常区集中在西部区域,且地表伴有刺鼻的煤烟味。
1.2 数据源
选用2019年11月5日对宝安进行两次连续无人机飞行所采集的数据,采用的ZENMUSE XT 2云台相机具有热红外和可见光两个光学镜头,采用热红外相机来获取整个研究区域的热红外影像数据,采用可见光镜头来获取研究区的RGB可见光影像,辅助判断煤火区。首先将ZENMUSE XT 2云台相机安装至经纬 Matrice 210 V2 无人机,之后对无人机的组装进行检查,确保安全飞行。在无人机准备起飞之前,需要对航线进行规划,无人机飞行高度设置为80m,航向重叠与旁向重叠率均设置为90%。随后可对热红外相机进行参数设定,可以通过DJI Pilot App进行相机参数的设置,拍照设置选择为温度线性TIFF,选择高增益模式,这样可以使获得的图像在拼接融合之后仍然可以利用公式换算成温度,实验所用无人机及热红相机相关参数见表1。
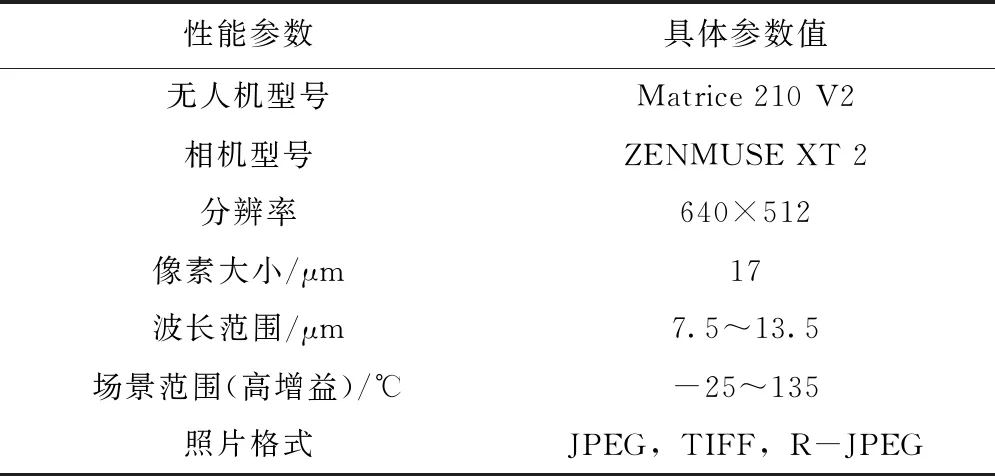
表1 无人机和热红相机参数
2 研究方法
2.1 数据处理
本次实验利用Pix4Dmapper软件对航拍影像进行拼接,首先需导入研究区的高分辨率可见光影像和无人机热红外影像;接下来将航拍中图像的同名像点进行影像匹配;同时需要标定照相机的内部和外部参数;之后进行点加密,这一过程是基于生成加密点云的自动连接点创建的;根据密集点云生成纹理网格;最终生成地表温度影像(分辨率为0.2m)和可见光数字正射影像(分辨率为0.04m),可见光影像用于判断地表类型。
由于在获取数据时,拍摄照片格式设置为TIFF,并且已经将地表比辐射率输入,同时完成了大气校正,因此无人机热红外相机获取的影像数据可通式(1)计算得到无人机影像中地表的温度值:
T=0.04×DN-273
(1)
式中,DN为测量的区域对应的灰度值;T为测量区域的温度,℃。
2.2 煤田火区的分布提取
煤炭在地下燃烧时,产生的热量会以热辐射的方式,通过煤火上覆岩层的热传导和岩层裂缝中的空气热对流传导至地表,在地表和空气中形成高温环境,被称为温度异常区。因此,圈定煤火燃烧区的首要步骤就是提取温度异常区信息。本次使用自适应梯度阈值法和人工阈值法两种方法进行温度阈值分割与煤火信息提取。
2.2.1 自适应梯度阈值法
在实际煤火现场,温度异常区与背景区边界存在着温度急剧上升的现象,因此可以通过温度梯度来对温度异常区边界进行提取。自适应梯度阈值法[17]综合了热空间分布和像素上下文,且对测温精度的依赖性较弱。自适应梯度阈值法在使用时基于两个假设:燃烧煤层及周围覆岩具有相似的热传导能力和能量从煤火燃烧中心至煤火边界骤减。该方法首先获取影像温度值,进行温度梯度计算,获得温度梯度影像,进一步提取梯度极值点,将极值点所对应的平均温度作为阈值来分割影像。将温度影像分割为“温度异常区”与“背景区”。同时,为了确定较为合适的温度阈值,并对自适应梯度阈值法稳定性进行分析,分别利用σ、2σ、3σ获取不同的梯度阈值,见表2。
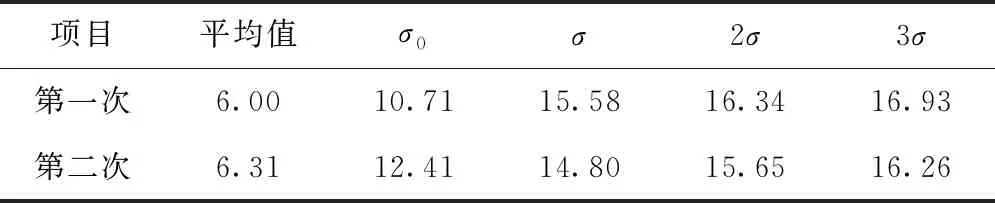
表2 无人机影像自适应梯度阈值设置 ℃
2.2.2 人工阈值法

表3 无人机影像人工阈值法阈值设置 ℃
3 结果分析与讨论
3.1 无人机热红外温度测量精度
对两次无人机热红外影像配准,之后对两幅影像进行精度分析,计算得到中误差为1.44℃。根据正态分布表查得,偶然误差绝对值小于三倍中误差的概率为99.7%。由此可知,将三倍中误差作为极限误差,将极限误差剔除后,得到中误差为0.97℃,小于1℃,证明无人机在煤火地区实际测温精度较可靠。并且从侧面印证无人机在时间维度上对于煤火信息的提取更加准确。由于无人机在飞行测温当天,煤火区气温较低且有大风,这些外部因素也会对无人机测温产生影响。
3.2 温度异常区人工阈值法圈定结果
利用人工阈值法对两幅无人机热红外影像进行煤火信息提取,在与煤火实地进行对比后发现煤火区圈定准确率较高,见表4。利用人工阈值法得到的温度阈值对地表温度影像进行温度异常区、疑似煤火区以及煤火燃烧区的圈定。

表4 无人机人工阈值法圈定面积结果
无人机热红外影像如图1所示,煤火燃烧区主要分布在影像的西南位置,煤火区域较为集中,影像中也存在部分细长形态的高温异常区,经过与可见光正射影像比较,发现该区域有明显的因煤火燃烧而产生的地裂缝并伴有大量烟雾,如图2所示,导致煤火燃烧的热量直接通过地裂缝中的空气传导到地面,产生高温异常区。

图1 无人机探测煤火人工阈值法圈定结果

图2 新疆宝安煤矿火区无人机正射影像
将无人机可见光与热红外影像对比分析,可有效判断地裂缝下是否存在正在燃烧的煤火,并可对此类裂缝进行地面灌浆。地面灌浆可充分利用火区附近的地表裂缝,将水引至灌浆裂缝带,并将黄土运到灌浆口附近,用高压水冲刷黄土形成泥浆,浆液经裂缝流入火区。火区附近的裂缝一般都与煤层直接连通,从这些地点灌浆一般都可以到达火区,充分降低高温、充填裂缝,最终使煤火熄灭。并且通过裂缝自地面灌浆的方法不用施工钻孔,可节省大量的费用[19,20]。
3.3 温度异常区自适应梯度阈值法圈定结果
目前有多种图形处理算子,本文利用自适应梯度对无人机热红外影像进行阈值分割,所采用的算子为Sobel算子,该算子主要用作边缘检测。是一种离散性差分算子,常用来计算图像亮度函数的梯度近似值。对于温度异常区面积提取时,首先对温度影像梯度计算得到梯度影像,对梯度影像分割并保存相对较高的梯度值,分割后的极值像元为一系列环形分布,此时为潜在梯度极值区,之后利用数学形态法细化,得到该环形区域的一个像元宽度的梯度极值线;同时分别利用σ、2σ、3σ获取相对高温区;将相对高温区与梯度极值线叠加,得到潜在阈值;最后将潜在阈值的平均值作为最终温度阈值,将影响分割为温度异常区与背景区,并统计温度异常区面积,见表5。
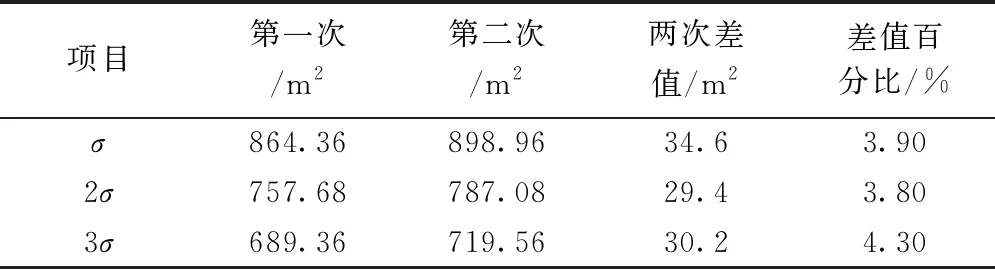
表5 无人机自适应梯度阈值法圈定面积结果
当利用自适应梯度阈值法以不同倍数的标准差对温度异常区进行圈定时,虽然不同倍的标准差圈定的煤火面积相差较大,但是温度阈值比较稳定,并没有太大变化,这也说明自适应阈值法稳定性更高,对于温度异常阈值的计算较稳健。由表5可知,温度异常区面积较小,这可能是由于Sobel算法的边缘检测效应,得出的结果一般是温度更高的区域,因此圈定的面积比较小,如图3所示。

图3 温度异常区自适应梯度阈值法圈定结果
3.4 分析与讨论
两种方法均可将热红外影像进行阈值分割和温度异常信息提取,且这两种方法计算结果相近。自适应梯度阈值法在不同倍标准差下,温度阈值变化较小,阈值结果稳定,可对不同影像自动确定温度异常边界;人工阈值法操作简便,可根据实际要求设定阈值,进一步提取煤火信息。因此,在利用无人机对煤火区域进行小范围温度探测和信息提取时,采用人工阈值法更加适用。由于无人机续航时间较短,大范围煤火探测的能力较弱,因此无人机更适合于煤火范围的精准圈定与煤火燃烧区的温度探测。在影像中存在部分零散的热异常区域,判断为地表正在燃烧的小火坑或矸石堆,其他部分地区可能是受到太阳照射而引起的地表温度升高,造成假煤火区。因此在有条件的情况下,也可以在夜间利用无人机对煤火区进行温度探测。无人机影像具有时空分辨率高,数据获取方便的特点。
4 结 语
本文采用无人机对新疆宝安煤矿火区进行了飞行测温实验,之后对无人机热红外影像进行精度评估,两次观测中误差为0.97℃。采用人工阈值法和自适应梯度阈值法对温度异常区进行圈定,最终获得煤火燃烧区面积,两次无人机影像圈定煤火燃烧区的结果基本一致,识别精度较高。通过对无人机地表温度影像的分析,作者发现无人机具有的高分辨率优势可以细致地探测到小范围煤火产生的温度异常区,说明无人机在小范围煤火区精准探测方面和实时动态监测方面都有较强的优势。无人机采集数据快,测温精度好,空间分辨率高且成本较低,在煤火探测领域将有很大的应用前景。
