EEMD降噪的行人活动识别方法
2021-06-19吴家骥
孙 伟 ,姜 伟 ,黄 恒 ,吴家骥
(1.辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000;2.武汉大学卫星导航定位技术研究中心,武汉 430079)
0 引言
随着微机电系统(micro-electro-mechanical system,MEMS)技术的不断发展,小体积,易携带,低成本的MEMS惯性传感器的性能越来越高,已广泛地应用到了各类可穿戴电子设备中[1-4]。基于可穿戴传感器(如MEMS惯性器件)的行人活动识别,不需要事先固定仪器设备,且实时测量人体3维(3D)加速度信息和角速度信息,通过特征提取和分类算法,实现人体行为模式的判别,具有良好的便捷性和实时性[5-8]。然而受制造工艺、安装精度和外部条件等因素的影响,使得加速度传感器的观测值中存在多种误差,影响数据质量。因此,在基于加速度信息的活动识别中,对数据进行降噪显得十分重要。
文献[9]采用巴特沃斯低通滤波器,来消除原始加速度、角速度信号中的高频噪声信号。但由于该低通滤波器有较长的过渡带,导致原始信号在过渡带上极易造成失真,使降噪效果下降。文献[10]利用中值滤波器,除去加速度信号中的噪声信号,中值滤波器具有较好的弱化噪声的能力,尤其适用于消除非平稳信号中的峰值噪声,但由于中值滤波器的降噪效果与噪声的密度分布有关,致使原始数据噪声密度较大时,降噪效果不理想。文献[11]利用梯度下降算法,对加速度数据进行优化,提高数据可用性,但该方法需要事先定义误差函数,因此不具有自适应能力。文献[12]采用小波阈值降噪方法,对数据进行预处理,通过对原始信号中不同频率的成分进行分解,有效去除了加速度计中的随机误差,但在处理过程中,需事先确定小波系数和分解层数,且降噪结果过度依赖小波基函数,因此同样不具有自适应能力。文献[13]利用滑动均值滤波器,来消除加速度数据和陀螺仪数据中的高频噪声,滑动均值滤波是信号处理中的一种实用并易于实现的滤波方法,其基本思想为一个数的取值由该数所在窗口内的滑动平均值来代替,从而形成一个新的平均值序列,滑动均值滤波具有实时性好、平滑程度高的优点,但对数据中偶然波动较严重的噪声,抑制能力较差。
针对以上问题,本文提出了一种集合经验模态分解(ensemble empirical mode decomposition,EEMD)算法的数据降噪行人活动识别方法。EEMD是一种时频分析方法,其分解基于信号本身极值点的分布,无需指定基函数与分解层数;利用高斯白噪声频谱分布均匀和均值为零的特性,经过多次分解抵消白噪声对原始信号的影响,抑制了模态混叠现象。在原始信号中加入高斯白噪声后,进行经验模态分解(empirical mode decomposition, EMD),对多次EMD分解的结果进行均值化处理;得到降噪加速度数据后,提取三种时域和三种频域特征,对分类器进行训练,实现对日常行人活动的自动识别。
1 EEMD算法
EMD算法是一种针对非平稳、非线性信号提出的自适应时频分析方法[14-15]。该算法基于原始数据本身进行分解,不需要指定基函数和分解层数,具有良好的时频分析能力。EMD算法将原始信号分解成多个具有不同特征尺度的本征模态函数(intrinsic mode function,IMF)分量和一个残余分量,IMF分量既可以是线性的也可以是非线性的,其极值点个数与过零点个数最多不相差一个,且由 IMF分量局部极大值确定的上包络线和局部极小值确定的下包络线均值为零[16-18]。
然而当信号的极值点分布不均匀时,EMD算法会产生模态混叠现象。当模态混叠现象发生时,IMF分量失去原本单一特征尺度的特征,使同一IMF分量中存在特征尺度分布不均匀的信号,或在不同 IMF分量中,存在特征尺度相近的信号,导致相邻两个IMF分量难以区分。EEMD算法是在EMD基础上提出的一种噪声辅助的信号分解方法,该方法运用了高斯白噪声频谱分布均匀的特性,通过将高斯白噪声加入到待分解信号中补充缺失的尺度;从而抑制或消除了模态混叠现象[19-21]。其算法具体步骤为
1)在原始信号x(t)中加入随机高斯白噪声nm(t)为

式中:xm(t)为加入高斯白噪声后的待分解信号;h为高斯白噪声标准差与信号标准差的比例系数。当h取值太大时,会掩盖原始信号本质特征;当h取值太小时,不足以引起低频部分极值点间隔的改变,h取值一般在0.01至0.5之间。
2)对待分解信号进行EMD分解,得到c个IMF分量Cl,m(t)(l= ( 1,2,…,c))和一个残余分量rc,m(t)为

3)重复步骤1)、步骤2),进行N次EMD分解。为消除加入的高斯白噪声对原始信号分解得到的IMF分量的影响,计算全部IMF分量与残余分量的均值,则信号经EEMD最终分解为
将惯性测量系统(inertial measurement unit,IMU)固定到实验人员的鞋面上,采集行人直线行走的步态数据,数据采集地点位于辽宁工程技术大学学生宿舍楼3楼。图1为MEMS加速度计x轴数据EEMD分解图。设置h为0.2,N为25,采用EEMD分解得到10层不同的IMF分量,依次按高频到低频特征排列。由图1可知,IMF 1 至IMF 2分量周期短,波动较大,将其划分为高频分量,IMF 3 至 IMF 10波动较平缓,将其划分为低频分量,且IMF 1至IMF 10未出现模态混叠现象。
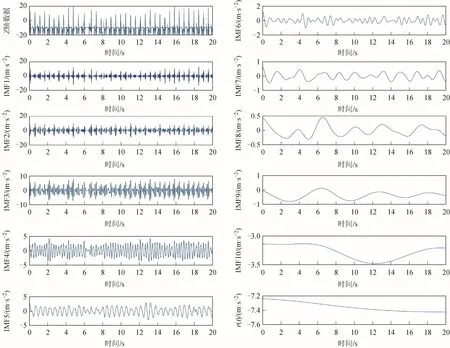
图1 EEMD分解结果
2 时频域运动特征提取
特征提取是实现活动识别的重要环节,特征提取主要从时域和频域两个角度进行。频域特征提取是指将原始信号从时域转换到频域,从频域中提取信号特征[21-22];常见的频域特征有快速傅里叶变换系数、能谱密度、频域熵等。时域特征提取是从时间域中对原始信号提取特征[23-24],相对于频域特征提取,时域提取具有提取方法简单、计算量小等优点;传统的加速度时域特征有滑动均值、方差、峰值强度、四分位距等。
2.1 时域特征
1)加速度滑动均值为

式中:L为数据长度;V为窗口长度;i=v,…,v+L-1;fv为第v个窗口内加速度模值滑动均值。
2)加速度模值小于Q3的平方和。四分位数是指将数列分成四部分即一个数列有三个四分位数,分别为上四分位数Q3,中四分位数Q2和下四分位数Q1。将窗口内加速度模值按递增顺序排列后四等分,则加速度模值小于Q3的平方和为
2)PLC控制层,其中的PLC芯片是整个系统的核心,一方面负责监测和控制来自现场传感器的开采或模拟信号;另一方面,负责将处理后的数据发送至上机位和执行器,保证上机位对现场数据的掌控,以及执行器按预设命令准确动作;

3)加速度模值小于Q1的平方和为

2.2 频域特征
将加速度数据经快速傅里叶变换至频域,频域特征参数包括:
1)最大幅值为

式中:Mf为频率f< 5 Hz 的幅值的集合;Fk为Mf中的最大幅值。
2)峰数值为

3)幅值之和为

式中:kσ为频率为0~5 Hz之间的幅值之和。
3 实验结果分析
实验采用 MTi-G-710传感器,包含三轴陀螺仪,三轴加速度计,三轴磁力计及气压计。实验部分只用到加速度数据,MTi-G-710加速度计满量程为±18g,g为重力加速度,g= 9.8 m/s-2,噪声为g×80×10-6Hz-0.5。图2为IMU坐标系示意图。
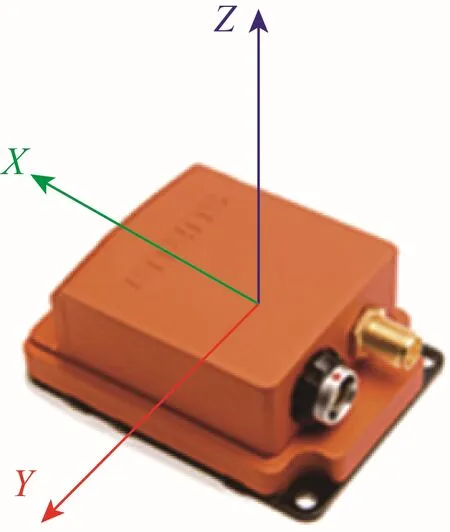
图2 IMU坐标系示意
x轴加速度与大腿方向一致,y轴加速度与行人前进方向一致,z轴测量人体横向运动。由于z轴在该文所要识别的活动模式中变化并不明显,因此,在进行特征提取时,只考虑x轴和y轴数据。将IMU置于大腿右侧进行数据采集,设置采样频率为50 Hz,采集5种日常生活中常见的活动数据,即慢跑、行走、上下楼梯和站立,数据采集地点为辽宁工程技术大学玉龙校区惠和楼。数据采集完成后,利用 EEMD算法对原始信号进行降噪,并对降噪后的信号,以20 Hz采样率进行重采样,设置的窗口长度为2 s,提取窗口内不同活动状态数据的特征,用于模型训练。
用于活动识别的实验数据采集方式与训练数据相同。实验地点位于测绘学院办公楼内,实验选取 3名测试人员进行数据采集工作,测试人员从办公楼4楼西侧站立5 s后,沿走廊自西向东行走至楼梯口,沿楼梯下至3楼,沿3楼走廊自东向西慢跑至楼梯口处,沿楼梯上至4楼,站立5 s后,数据采集结束。图3为 3名测试人员活动识别结果,表1至表3为对应的混淆矩阵。由混淆矩阵计算识别结果即查准率α和查全率β,其计算方法为
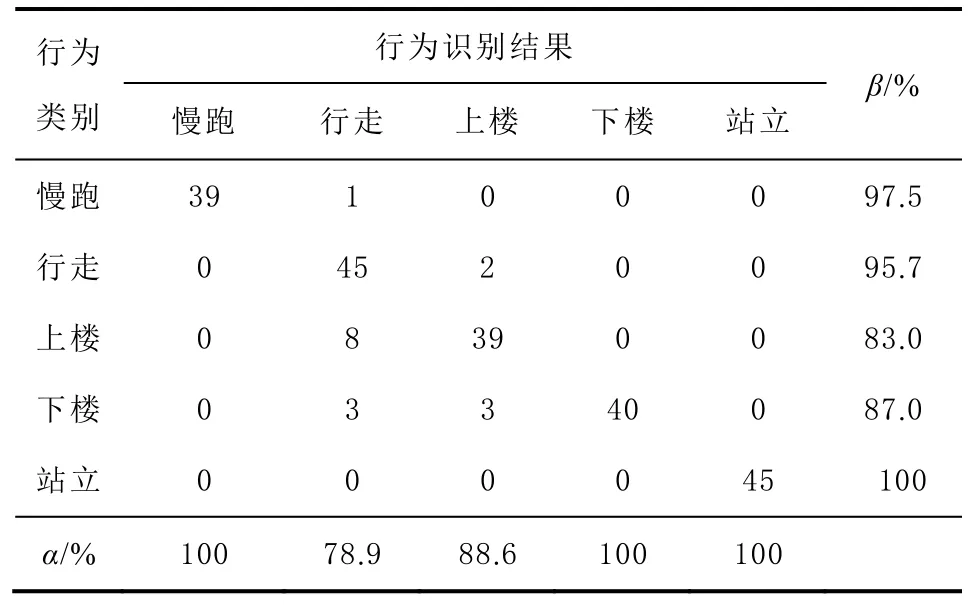
表1 样本1分类混淆矩阵

表3 样本3分类混淆矩阵

图3 行人活动识别结果
式中:TPi为被正确分类的第i类活动;FPi为其他类别活动被错误分类为i类;FNi为第i类活动被错误分类为其他类别。

表2 样本2分类混淆矩阵
表 4为三组测试人员的活动识别查全率和查准率,表5为各类活动模式平均识别精度。

表4 各测试人员活动识别率
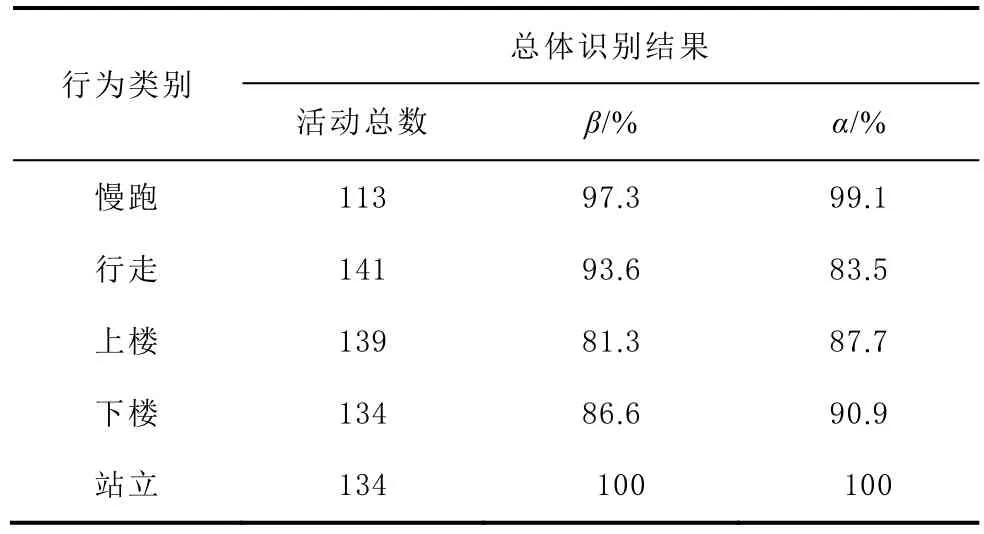
表5 活动模式识别精度
由表1至表3可知,降噪后的行人活动识别的查全率β和查准率α均在78%以上,其中站立的查全率β和查准率α均为 100%。对于慢跑这种行人活动,有一组慢跑被误识别为下楼,导致查全率β为 97.1%;一组站立被误识别为行走,查全率β为 97.5%。由表5可知,加速度数据经EEMD降噪后,对于行走,上楼,下楼这三种运动量较小的行人活动,会有少量的样本被误识别为其他活动模式,查准率α分别为83.5%,87.7%,90.9%;识别精度较高,满足日常生活中对这5种行人活动识别的精度要求。
表 6为样本 3利用原始数据进行活动识别对应的分类混淆矩阵。
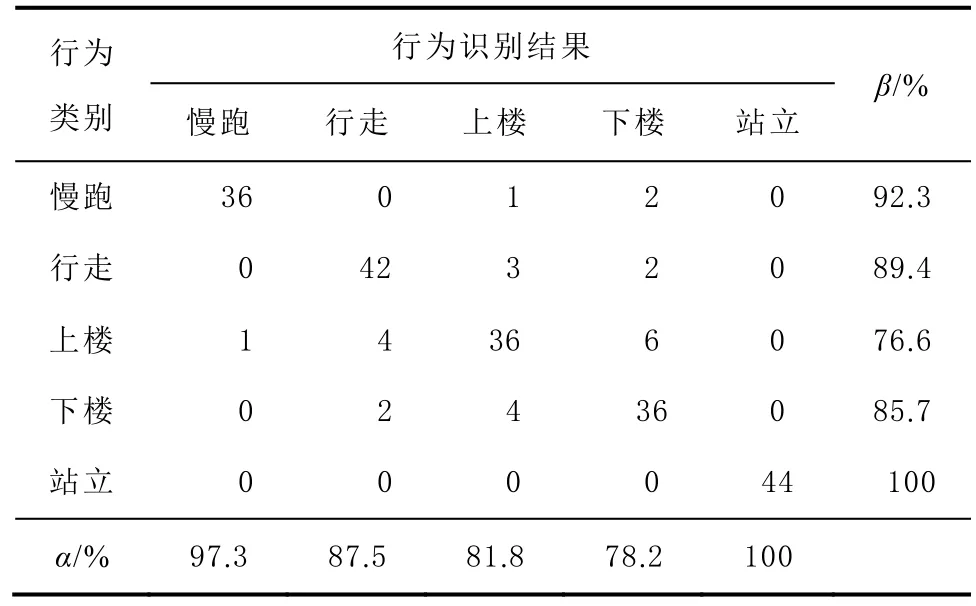
表6 原始数据分类混淆矩阵
对比表3可知,行走、上楼和下楼三种模式的混淆程度,相较于降噪后明显增大;除站立模式外,其他运动模式精度均有不同程度的下降,上楼模式查全率β下降4.3%,查准率α下降2.6%;行走模式查全率β下降2.1%,查准率α下降4%;下楼模式查全率β下降4.7%,查准率α下降6.2%。对比实验结果表明,该文提出的降噪算法能有效提高行人活动识别的精度。
4 结束语
数据质量的好坏直接影响行人活动识别的精度。本文采用 EEMD算法将原始数据分解为多个本征模态分量和一个残余分量,去除高频部分的模态分量,将剩余分量进行重构,得到降噪信号后,提取时域、频域特征,用于行人活动识别。三组测试人员的实验结果及对比实验表明,5种活动模式的查全率β为 81.3%~100%,查准率α为78.9%~100%,验证了降噪方法的有效性。但当信号被噪声污染较严重时,如何有效分离有用信号和噪声信号,将成为下一步研究的重点。
