基于Geomagic Wrap的安全锤逆向设计
2021-06-18孟伟娜孙祖东牛振华
孟伟娜 , 孙祖东 , 牛振华
(安阳职业技术学院,河南 安阳 455002)
逆向工程(Reverse Engineering),也称为反求工程、反向工程,它是相对于传统正向设计而言的,将已经存在的零件(或原型)通过扫描,采集数据,生成图样,再制造出产品,广泛应用于航天航空、医学、模具制造、产品设计、文物修复等领域[1]。Geomagic Wrap是3D SYSTEMS公司发行的一款功能强大的3D建模数据处理软件,它可以将三维扫描数据和导入的文件直接转换为3D模型。
安全锤的逆向设计流程包括使用三坐标测量设备、三维扫描仪测得样品安全锤的点云数据;使用Geomagic Wrap逆向设计软件对安全锤的点云数据进行点云处理、面片编辑、曲面建模等,使用3D打印机对处理过的安全锤面片进行快速成型,或者使用CNC机床对重建安全锤模型进行加工,与样品安全锤进行对比分析。安全锤的逆向设计过程可以总结为两大步骤:数据采集和CAD模型重建[2]。逆向工程具体工艺流程如图1所示。

图1 逆向设计工艺流程
1 数据采集
数据采集是利用三坐标测量仪或者非接触式的拍照式三维扫描仪、非接触式的激光三维扫描仪来测量被测物品特征点的空间坐标值,是逆向工程中重要的环节。本文采用了北京三维天下的Win3DD-M单目拍照式三维扫描系统对安全锤进行点云数据采集。该系统拥有130万像素的相机,采用非接触式拍照扫描,单幅扫描范围300 mm×210 mm×200 mm,该扫描系统如图2所示。

图2 Win3DD-M单目拍照式三维扫描系统
本文中的安全锤为金属材质,光滑处可能会反射光线,影响正常的扫描效果。扫描前,对安全锤表面喷涂薄层均匀的显像剂,从而获得更加理想的点云数据。因为要求扫描零件的整体点云,还要在安全锤曲率较小的曲面上粘贴5~7个标志点[3],使相机在尽可能多的角度可以同时看到,以方便拼接扫描,如图3所示。

图3 喷显像剂和贴标志点后的安全锤
将安全锤用黑色工业油泥固定在转盘上,确定转盘和安全锤在扫描仪投射的十字中间,尝试旋转转盘一周,保证安全锤在扫描过程中不移动。在扫描仪软件最右侧实时显示区域检查,以保证能够扫描到整体;在软件右侧的实时显示区域观察安全锤的亮度,并通过在软件中设置相机曝光值来调节亮度;检查扫描仪到被扫描物体的距离,在软件右侧实时显示区域内观察到的白色十字与黑色十字重合,当重合时的扫描仪镜头与安全锤的距离约为600 mm,Win3DD-M三维扫描系统在600 mm的距离进行扫描,点云数据质量最好,将所有参数调整好即可点击“扫描操作”,如图4所示。将转盘旋转一周,翻转或调整安全锤和转台的角度,以保证安全锤的所有特征都能被扫描出来。扫描结束后,点云数据如图5所示,将安全锤的点云数据保存为.asc文件。

图4 扫描仪软件

图5 安全锤点云数据
2 基于Geomagic Wrap的逆向建模
2.1 点云数据处理
扫描得到的安全锤点云数据包含杂点、噪音、孤点等多余数据,使用Geomagic Wrap的点编辑功能对点云数据进行处理。点云数据处理主要包括以下几个步骤:
2.1.1 手动去除多余点云
从图5中可以看出,在安全锤点云附近存在着大量无用的点云数据,这些数据可以通过选择、删除工具进行删除。
2.1.2 去除体外孤点和删除非连接项
手动不能完全删除多余的无用数据,还存在一些与其它多数点保持一定距离的体外孤点以及与其它点组相距遥远的非连接项,需要选择并删除。
2.1.3 减少噪音
点云数据中的噪音是扫描仪的误差,将点移动至软件统计的正确位置上来减少这个噪音,可以使点的排列更加平缓。
2.1.4 统一点云
点云数据太大,会减慢电脑的运行速度。使用统一点云功能,使平坦曲面上的点云数目减少量一致,让点云以规定的密度减少安全锤点云数据上的点云数目。不仅可以提高电脑的运行速度,而且不改变模型的形状。
2.1.5 封装
点云数据处理完毕后,需要将点云封装为三角面网格,从而将处理点云对象改变为处理多边形对象,为安全锤的3D模型建模做好准备。点云处理结束后如图6所示。点云数据封装后的三角面网格,如图7所示。三角面网格保存为.stl文件,stl文件可以直接使用3D打印机进行快速成型。
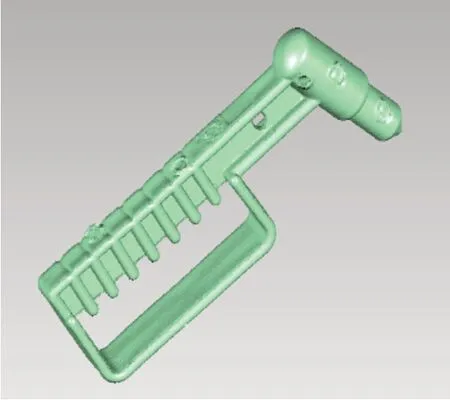
图6 处理结束后的点云

图7 封装后的安全锤三角网格
2.2 安全锤3D模型重建
安全锤点云数据处理完毕并封装后使用Geomagic Wrap的“精确曲面”功能进行安全锤的3D模型重建,包含多边形处理、删除钉状物、去除特征、砂纸、曲面重建等步骤。
2.2.1 多边形网格处理
封装后的安全锤三角面网格如图7所示,包含很多数据缺失的地方,使用填充孔功能,选择合理的填充方案,将缺失的数据补齐。孔填充后的多边形网格如图8所示。
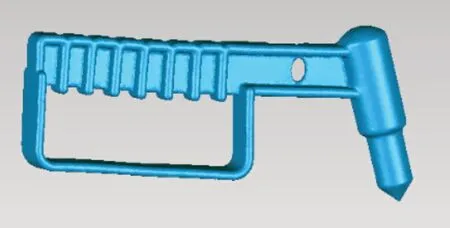
图8 填充后多边形网格
2.2.2 删除钉状物
删除钉状物功能可以自动检测并展平多边形网格上的单点尖峰,提高多边形网格的光滑程度。
2.2.3 去除特征
进行模型三维扫描的时候,因为标志点、用于固定模型的工业油泥会在点云数据上留有凹凸不平的痕迹,使用去除特征功能可以删除这些痕迹并根据多边形网格的曲率自动填平,提高多边形网格的表面质量。
2.2.4 砂纸
可以手动清除局部较小的不光滑网格,提高光顺度。
2.3 安全锤曲面重建
点击精确曲面图标,进入曲面重建阶段。可以使用自动曲面或者按探测轮廓线、构造曲面片、构造栅格、去面片编辑、曲面拟合这些步骤进行曲面重建。对于曲面较为复杂的模型,建议使用分步骤进行拟合曲面,可以根据实际需要进行曲面曲率的编辑,获得更好的曲面质量。本文使用自动曲面功能来拟合曲面。
打开自动曲面化对话框,选择几何图形类型为机械、指定曲面片计数为1500、调节曲面细节值为中值、曲面拟合适应性公差设置为0.05,单击应用后开始自动拟合曲面。拟合后的安全锤曲面如图9所示。
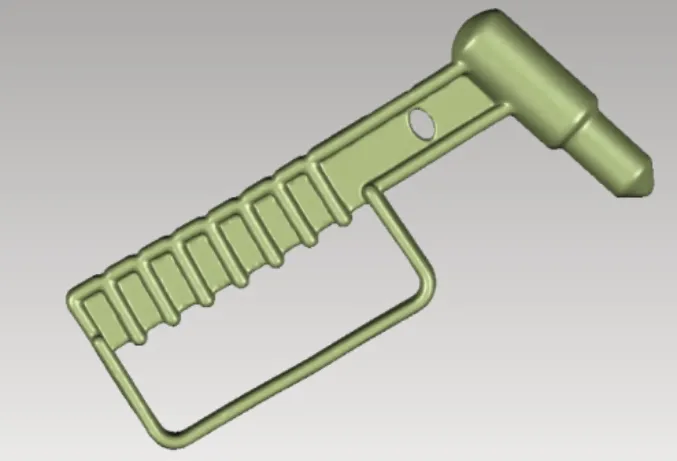
图9 拟合后的安全锤曲面
2.4 曲面偏差分析
曲面拟合结束后,使用Geomagic Wrap的偏差功能,可以生成一个以不同颜色区分拟合后的曲面和点云数据间的3D偏差图,如图10所示。

图10 安全锤偏差分析图
从图10中可以看出拟合后的安全锤曲面标准偏差为0.0151 mm,最大距离偏差为+0.2245 mm及-0.1148 mm,平均距离偏差为0.0027 mm[4]。拟合后的曲面模型基本上都在绿色偏差范围内,表明拟合后的曲面与点云数据的偏差很小。最后,将重建的安全锤曲面另存为.igs或.stp等格式文件,可以使用CREO、UG、SolidWorks等CAD设计软件进行进一步修改,也可以使用PowerMill、MasterCam等CAM软件进行数控编程,再用CNC机床加工。
3 结语
逆向工程技术可以有效地缩短产品生产周期,降低产品的研发成本,现已经广泛应用于很多行业。本文利用Win3DD-M三维扫描系统和Geomagic Wrap 软件,快速有效地实现了安全锤的重新建模,并进行了偏差分析,分析结果表明偏差在合理范围之内。