有砟轨道线路精测网控制法误差研究
2021-06-18许玉德鲁思成赵梓含
许玉德,鲁思成,赵梓含
(同济大学1.道路与交通工程教育部重点实验室;2.上海市轨道交通结构耐久与系统安全重点实验室,上海201804)
线路维护过程中,会产生精测网控制误差和弦测误差。在弦测法的研究中,程樱[1],毛晓君[2]分别提出了三点弦测和四点弦测法。铁路精测网是保证铁路线路施工、轨道养护维修的重要基础,采用精测网进行线路线形控制,是以线路的平面坐标、高程为基准,使线路实际线形与设计线形之间的偏差值达到最小。精测网是线路施工的基础,也是线路养护维修的重要保障。我国铁路工程精密测量控制体系包括平面控制网和高程控制网,轨道控制网(CPⅢ)在轨道的养护维修中发挥重要作用,是轨道测量、养护维修的基础,根据轨道控制网确定自由设站点坐标,进而对线路进行观测得到不平顺值。在测站坐标计算时,通常采用三维测量方法,平差过程会产生一定的误差。另外,线路基础变化会导致CPⅢ点位发生偏移,进而导致线路测量结果发生变化,带来线形控制误差。
刘文锋[3]对高速铁路控制网测量进行了全面的介绍。宗林[4],樊政[5],肖伟伟[6]探讨了CPⅢ精测网及轨检小车在轨道精调和养护维修中的应用。郑磊[7]以汉宜铁路有砟轨道为例,介绍了精测网在养护维修中的应用。王长进[8]结合客运专线精测网的建设经验和应用效果,对于规范中尚不明确的问题,提出了具有针对性的看法。他指出了在特定条件下,建立GPS基站网、埋设深水准点、埋设基岩点的必要性。王智[9]结合高速铁路精测网评估验收的工作实践,介绍了精测网评估验收的方法和工作范围、具体内容,探讨了精测网评估验收的必要性。
赵景民[10]提出以三维精密观测网为基础,运用轨道检测小车,对轨道中线坐标及轨面高程等进行精确检测、数据处理,得出在三维精密观测网下,运用轨道检测技术进行轨道检测的可行性和实用性。周东卫[11]从精密工程测量的几个主要方面入手,提出精密工程测量管理的关键控制环节及对策,相关经验可对在建、待建铁路工程提供借鉴作用。郑智华[12]分析了长度变形误差对桥梁和隧道施工测量的影响,并分析了精密控制网络施工控制网络存在的问题,提出了改善建议。何波[13]通过对分析现有算法的分析,对CPⅢ平面网的技术问题进行探讨,对CPⅢ平面网平差算法进行了优化。耿中利[14]对轨道几何位置测量值,自由设站点位置以及轨道平顺性等3个方面进行分析,探讨了CPⅢ点位变化对于轨道线形测量值的影响。
目前针对有砟轨道的铁路精测网研究较少,与无砟轨道相比,有砟轨道的碎石道床更容易发生位移,这导致线路线形的变化更大。本文对有砟轨道精测网线形控制中存在的误差进行研究,分析精测网线形控制引起测站坐标、轨道不平顺指标的误差大小。
1 精测网误差产原因
1.1 精测网控制原理
为了保证铁路轨道的稳定性的和平顺性,满足施工、养护维修过程中的精度要求,我国建立了一套贯穿于整个线路的施工期、运营期和维护期的完整精密测量体系,即铁路工程测量控制体系,包括平面控制网和高程控制网。
1.1.1 平面控制网
铁路工程测量平面控制网在框架控制网(CP0)基础上分三级布网控制,即基础平面控制网(CPⅠ)、线路控制网(CPⅡ)和轨道控制网(CPⅢ),如图1所示。其中,基础平面控制网主要为勘测、施工、运营和维护提供基准;线路控制网主要为勘测和线下工程提供基准;轨道控制网主要是为轨道铺设和线路维护提供基准[15]。

图1 铁路工程测量平面控制网Fig.1 Railway engineering survey plane control network
1.1.2 高程控制网
高程控制网分两级布设,第一级为线路水准基点控制网(基岩点、深埋水准点和普通水准点),第二级为轨道控制网(CPⅢ),如图2所示。线路水准基点应沿线路布设成附合路线或闭合环,每2 km布设一个水准基点,重点工程(大桥、长隧及特殊路基结构)地段应根据实际情况增设水准基点。点位距线路中线50~300 m为宜,水准基点可与平面控制点共用。水准路线一般宜与国家一、二等水准点联测,最长不应超过400 km,线路水准基点控制网应全线一次布网测量。轨道控制网(CPⅢ)控制点水准测量应附合于线路水准基点,水准路线附合长度不得大于3 km。CPⅢ水准网与线路水准基点联测时,应按精密水准测量要求进行往返观测CPⅢ控制点水准测量应对相邻4个CPⅢ点所构成的水准闭合环进行环闭合差检核,相邻CPⅢ点的水准环闭合差不得大于1 mm。
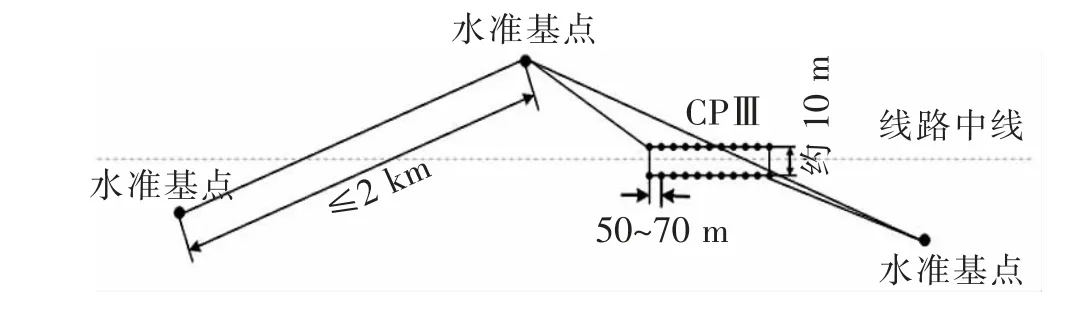
图2 铁路工程测量高程控制网Fig.2 Railway engineering survey elevation control network
1.2 误差产生原因分析
精测网的CPⅢ点,自由设站示意图如图3所示,其中y轴为线路纵向,x轴为横向。点Q1为自由设站点,点P1,P2,P3,P4,P5,P6,P7,P8为8个已知坐标的CPⅢ点,其中P1,P2,P3,P4距离自由设站点Q1较近,P5,P6,P7,P8距离较远。y轴方向上两点间隔60 m左右,x轴方向上两点间隔10 m左右。P1,P2,P3,P4与Q1距离相近,均为30 m左右;P5,P6,P7,P8距离自由设站点Q1较远,且P5,P6,P7,P8与Q1距离相近,均为90 m左右。Q2,Q3为测站Q1的两个相邻测站,两点关于Q1近似对称。
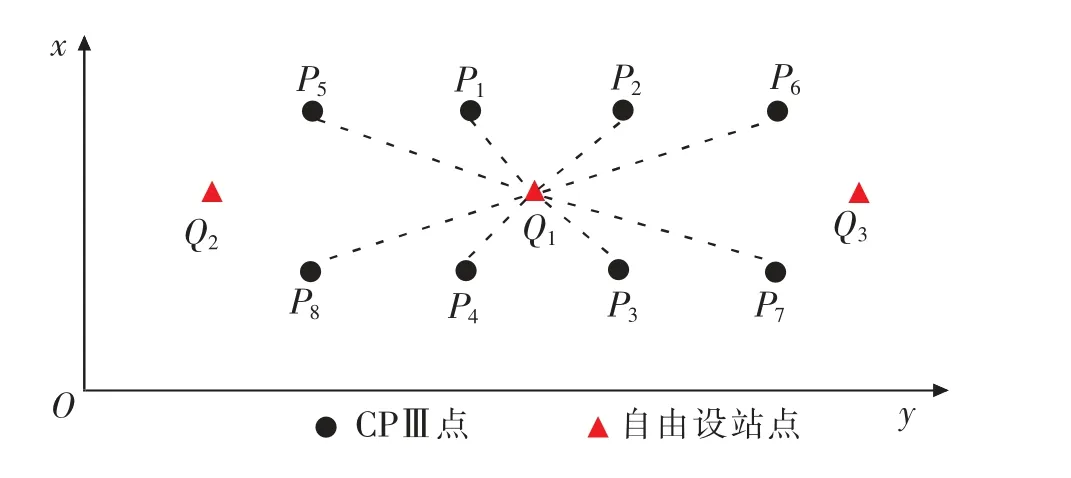
图3 精测网示意图Fig.3 Schematic diagram of precision measurement network
在观测过程中,从测站Q1对多个CPⅢ点进行观测,得到多个观测值。机械误差、环境变化等因素,导致解算的测站坐标结果会有所偏差,因此需要对计算结果进行平差。平差过程中,无法直接判断各个观测值的权重,对观测值进行定权时,当检验值未达到标准即继续平差,当检验值达到标准,即认为定权结束。因此,精测网控制线形时,一个重要的误差来源是三维平差误差。
当线路基础发生变化时,CPⅢ点也会随之发生一定的偏移。《高速铁路有砟轨道线路维修规则》[16]中规定:CPⅢ点复测坐标与原坐标相比,差值小于2 mm时,沿用原测量成果。即当CPⅢ点偏移量小于2 mm时,仍然会按照CPⅢ点原坐标进行计算,使得测站平面坐标、高程计算结果发生改变,进而导致采集的轨道点坐标发生改变。CPⅢ点位偏移会导致线路测量结果发生变化,带来线形控制误差。
2 测站坐标计算原理
采用精测网对有砟线路进行测量时,通常将仪器架设在测站点上,每个测站观测多个CPⅢ点,对于每个CPⅢ点,分别观测水平方向、天顶距、斜距3类观测值。根据CPⅢ点与测站点之间的几何关系,进行测站坐标计算。
假定点Pi(Xi,Yi,Zi),Pj(Xj,Yj,Zj)为坐标已知的CPⅢ点,Pk(Xk,Yk,Zk)为坐标未知的测站。测量仪器架设在测站时,示意图如图4所示,此时需要采用边角后方交会的方法求解测站坐标。在点Pk用测量仪器照准点Pi,Pj,测量得到水平方向αki,αkj天顶距βki,βkj和斜距Ski,Skj。

图4 仪器架设在测站示意图Fig.4 Schematic diagram of the instrument installed at the station
根据余弦定理,得到∠PkPiPj在xoy平面的投影角为

则PkPi边的方位角计算公式为

因此,测站点Pk的坐标为

3 误差分析
3.1 计算流程
精测网控制法误差分析所需数据见表1所示,其中CPⅢ坐标及其改正值、测站三维坐标等为线路测量基础数据。使用全站仪、轨道静态几何检测小车进行测量,观测得到各类测量值,主要包括:水平方向、天顶距、斜距等3类自由设站数据,以及点号、里程、轨距、超高、中线实测坐标、左右轨道实测坐标等轨道数据。将基础数据、自由设站数据、轨道实测数据相结合,进行误差分析。

表1 计算数据Tab.1 Calculated data
精测网控制法误差的计算流程为:根据CPⅢ点坐标基础数据及其变化量计算得到CPⅢ点变化后坐标,以此为基础对测站点进行平差,得到变化后的测站点坐标,进而计算得到变化后的轨道点数据。对变化前后的测站点坐标进行对比,分析CPⅢ点坐标变化量对测站坐标的影响;对变化前、变化后的轨道数据分别进行平顺性分析,计算CPⅢ点坐标变化量对轨距、水平、垂向、横向轨道不平顺数据的影响,并总结分析其变化规律。计算流程如图5所示。

图5 精测网控制法误差分析流程图Fig.5 Flow chart of error analysis of precision measurement network control method
3.2 测站坐标误差
CPⅢ点位偏移导致其坐标发生变化,会直接影响到测站坐标的计算结果。分析CPⅢ点位偏移所引起的本测站坐标误差,分别讨论不同数量、不同位置的CPⅢ点发生平面、高程坐标偏移时,测站坐标的误差。所选取的8个CPⅢ点中,1,2,3,4号点与测站距离相近,4个点引起测站坐标误差也是相近的,可以认为这4个点是等效的,同理,5,6,7,8号点也可以看作等效点。由此可知,有2个CPⅢ点变化时,1,5号点同时变化与2,6号点同时变化引起的测站坐标误差是相同的,可以将这两种工况视为等效工况。为了避免工况重复,将等效工况剔除,选取具有代表性的点位变化方式进行误差分析。
3.2.1 本测站
CPⅢ点发生偏移时,本测站平面、高程坐标误差计算结果见表2,表中分别表示测站x,y,z 3个方向的坐标误差(下同)。

表2 本测站坐标误差Tab.2 Coordinate error of the measured station
将上述计算结果整理为表3。

表3 本测站坐标误差最大值Tab.3 Maximum coordinate error of the measured station mm
根据上述计算结果可知,当仅有1个CPⅢ点发生变化时,距离测站最近的1号点引起测站误差较大;当有2个CPⅢ点发生变化时,距离测站较近的1,2号点引起测站误差最大。当有3个、4个CPⅢ点发生变化时,绘制各CPⅢ点x,y,z坐标变化2 mm时,本测站x方向坐标误差的雷达图,如图6所示,图中标记大小代表CPⅢ点与测站点之间的距离,标记越大代表距离越大。
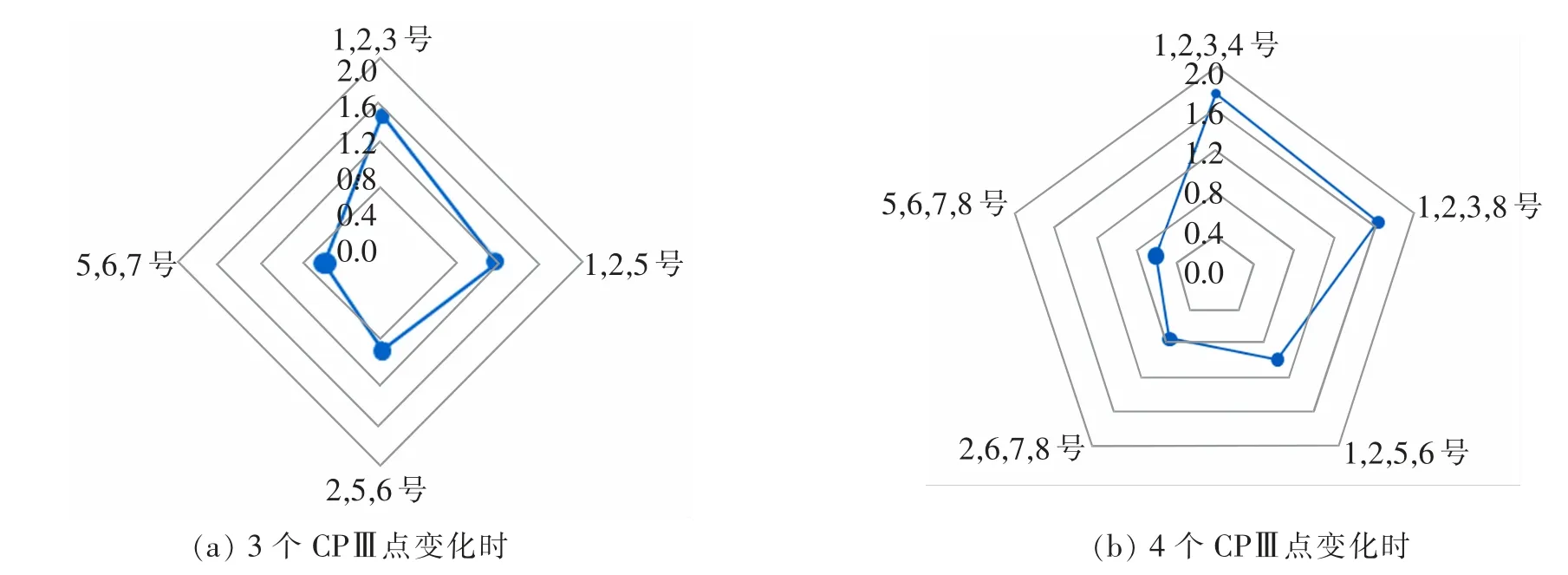
图6 本测站误差雷达图(单位:mm)Fig.6 Radar chart of errors for the measured station(Unit:mm)
由图6可知,当有3个、4个CPⅢ点发生变化时,CPⅢ点与本测站距离越小,引起本测站x方向误差越大(y,z方向与之变化趋势相同)。
3.2.2 相邻测站
根据对称关系,当有一个、两个点变化时,本测站与相邻测站的计算结果是相同的,故略去1个、2个点变化时的误差情况。CPⅢ点发生偏移时,相邻测站平面、高程坐标误差计算结果见表4。
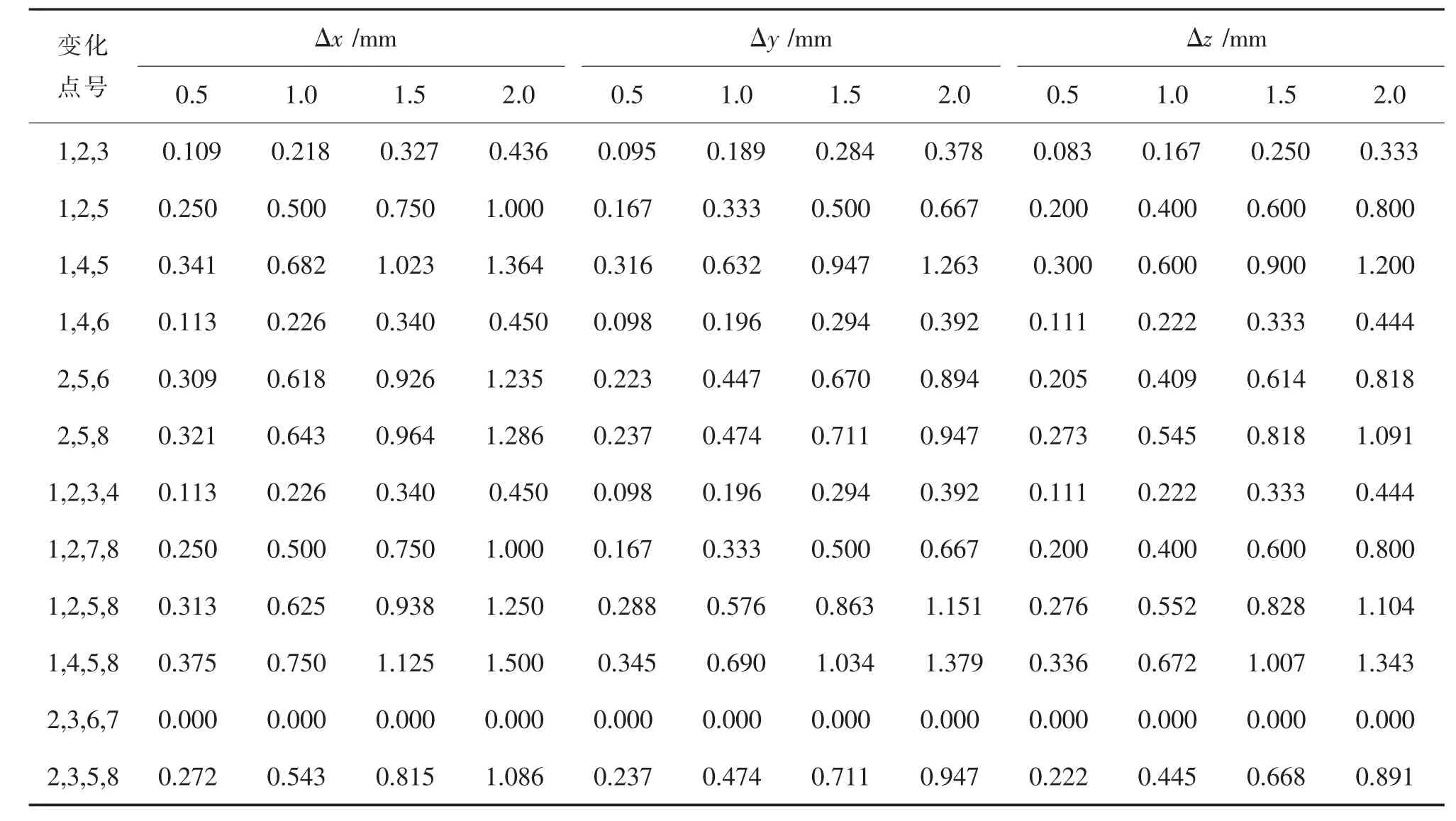
表4 相邻测站坐标误差Tab.4 Coordinate error of adjacent stations mm
将上述计算结果整理为表5。

表5 相邻测站坐标误差最大值Tab.5 Maximum coordinate error of adjacent stations mm
根据上述计算结果,相邻测站坐标误差变化趋势与本测站相同。CPⅢ点各方向坐标变化引起本测站、相邻测站坐标误差总体趋势为:控制点距离测站越近,则其变化,对测站坐标的影响越大,与测站相距较远的控制点,其变化,对测站坐标的影响不敏感;其他因素不变时,测站坐标误差随着坐标变化量增大而增大;其他因素不变时,CPⅢ点横向变化变化引起测站坐标误差最大,纵向次之,竖向最小。
3.3 不平顺指标误差
CPⅢ点位偏移导致测站坐标发生变化,进而对轨道平顺性指标的测量值产生影响,分别讨论1号、5号CPⅢ点平面、高程坐标变化引起轨距、水平、垂向、横向测量值的误差。选取8个CPⅢ点为研究范围,即以一长约180 m的区段为样本进行讨论分析。
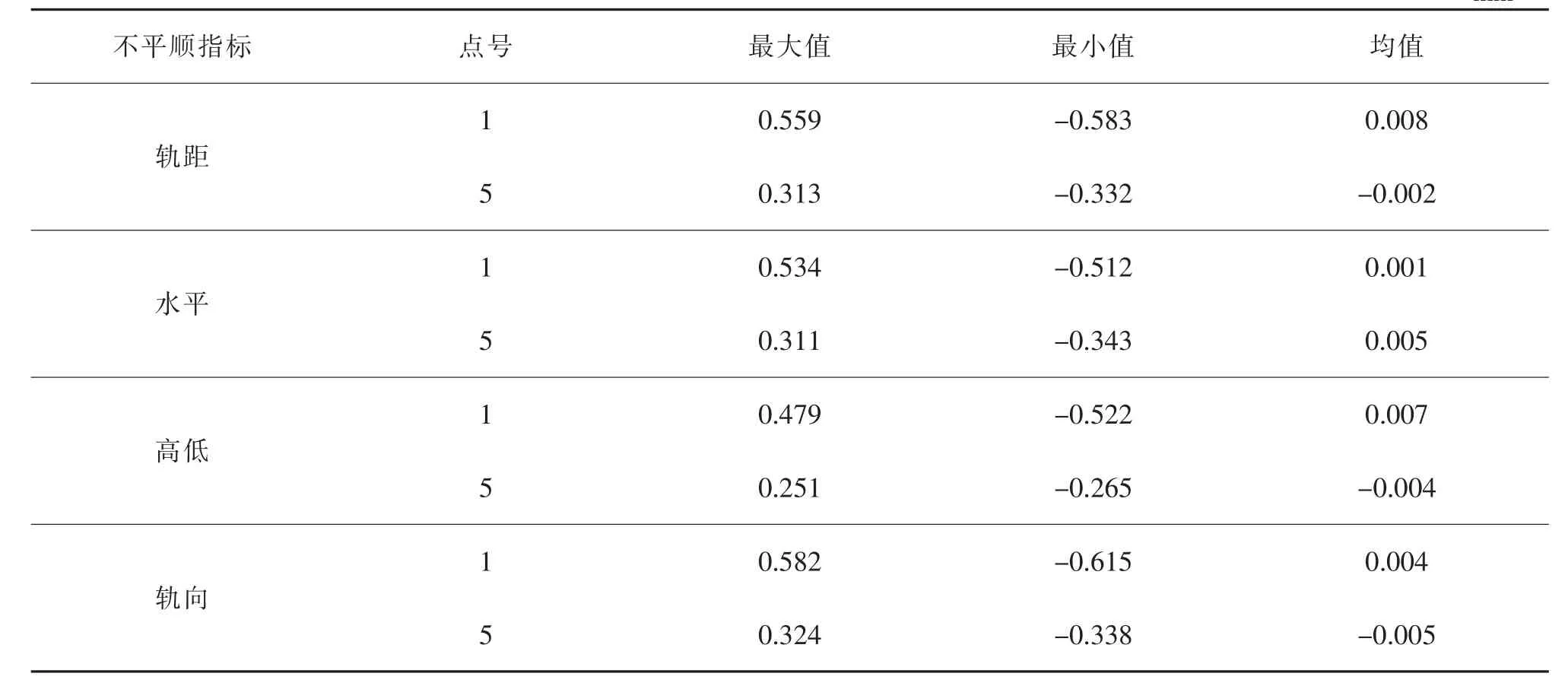
表6 轨道不平顺指标误差Tab.6 Track irregularity index error mm

图7 高低不平顺指标误差(单位:mm)Fig.7 Irregularity indicator error(Unit:mm)
轨道不平顺指标误差变化的整体趋势为:对于任意一个单项,CPⅢ点坐标变化量相同时,与测站距离更小的CPⅢ点引起误差更大。轨道不平顺指标中,受到影响最大的为轨向,其次为轨距和水平,影响最小的为高低。
4 结论
1)根据我国铁路精密控制测量体系及精测网控制法原理,分析得知导致精测网控制法误差产生的主要来源包括两个方面:三维平差误差、点位变化误差。
2)精测网控制法中,测站坐标误差的整体趋势为:控制点距离测站越近,则其变化,对测站坐标的影响越大,与测站相距较远的控制点,其变化,对测站坐标的影响不敏感。其他因素不变时,测站坐标误差随着坐标变化量增大而增大。相邻测站与本测站坐标误差变化趋势相同,数值不同。
3)轨道不平顺指标误差变化的整体趋势为:对于任意一个单项,CPⅢ点坐标变化量相同时,与测站距离更小的CPⅢ点引起误差更大。轨道不平顺指标中,受到影响最大的为轨向,其次为轨距和水平,影响最小的为高低。
4)距离测站最近的CPⅢ点各方向坐标变化量为1.0 mm时,轨距、水平、轨向、高低误差最大值分别为0.559,0.534,0.479,0.582 mm,误差大于0.4 mm的分别占6.62%,7.97%,3.39%,4.42%。
