基于模糊PID控制的恒压浇灌系统研究
2021-06-17金光哲段科俊王璐
金光哲 段科俊 王璐


摘要 恒压浇灌系统的管网压力具有非线性、大惯性、时变性,难以建立精确的数学模型。首先确定2种常见的模糊控制与PID控制的结合方式,分别为Fuzzy-PID复合控制与模糊自适应PID控制;然后,针对Fuzzy-PID复合控制设计一种模糊控制切换隶属函数,对模糊自适应PID建立模糊子集和模糊规则库;最后,在MATLAB软件中搭建恒压浇灌系统仿真框架,通过仿真试验结果对比不同控制方式的控制效果。仿真试验结果表明,Fuzzy-PID复合控制没有产生明显的超调现象,适用于无超调系统;模糊自适应PID调节时间短,但有明显的超调现象,适用于快速响应系统。
关键词 模糊PID;恒压浇灌;参数整定;MATLAB
中图分类号 S.274.2文献标识码 A文章编号 0517-6611(2021)02-0206-05
doi:10.3969/j.issn.0517-6611.2021.02.056
开放科学(资源服务)标识码(OSID):
Research on Constant Pressure Irrigation System Based on Fuzzy PID Control
JIN Guangzhe, DUAN Kejun,WANG Lu
(Yuxi Agriculture VocationTechnical College,Yuxi,Yunnan 653106)
Abstract The pressure of the pipe network of the constant pressure irrigation system is nonlinear, large inertia, and timevarying, so it is difficult to establish an accurate mathematical model. Firstly, two common methods of fuzzy control combined with PID control, which are FuzzyPID composite control and fuzzy adaptive PID control. Then, a fuzzy control switching membership function was designed for FuzzyPID composite control. The fuzzy subsets and fuzzy rule base were established. Finally, a simulation framework of constant pressure irrigation system was built by using MATLAB software, the control effects with different control methods were compared based on the simulation results. The simulation test results showed that FuzzyPID composite control had no obvious overshoot phenomenon,and it was suitable for systems without overshoot. Fuzzy adaptive PID had a short adjustment time,but it had obvious overshoot phenomenon and it was suitable for fast response systems.
Key words Fuzzy PID;Constant pressure irrigation;Parameter tuning;MATLAB
恒壓灌溉对于保护农田和节约水资源具有重大意义,也是浇灌系统的重要组成部分。在传统的农业浇灌中,有沟灌、漫灌、畦灌[1]等方式。传统浇灌方式过于依赖人工,且灌溉的土壤墒情难以把握,容易造成资源浪费;随着控制技术的发展,农业温室的灌溉方式也有了新的变化,现阶段有采用简单的微机控制进行农业灌溉,相比于传统的灌溉方式,微机灌溉能够节约人力成本,灌溉效率显著提升,但多数微机控制灌溉系统结构简单,难以保证管内压力恒定,造成设备和管网的反复破损[2]。因此,通过采用控制算法改进简单的微机控制灌溉方式,可以促进农业灌溉技术向自动化、智能化、精细化方向发展。
在农业灌溉领域已经有很多学者通过改进控制算法来实现节水灌溉,有常规的PID控制灌溉、灰色预测控制灌溉、Fuzzy控制灌溉、PSO优化智能灌溉等。例如,刘洪静等[3]采用模糊PID算法,通过土壤湿度的偏差和偏差变化率作为系统输入量,在线调整PID参数,实现对灌溉系统的智能控制。许景辉等[4]为了解决水泵运行不稳定,通过SOA(seeker optimization algorithm)算法优化PID控制参数,提高控制系统的响应速度,减小超调量,实现对灌溉系统中水泵的动态控制。李嵩等[5]采用PSO算法对模糊PID控制进行优化,有效解决了温室灌溉控制中的非线性、时变性和滞后性问题,使系统响应速度快、配比精度高、运行稳定。王琨琦等[6]以PLC为控制核心,通过水分传感器对土壤湿度的实时采集,采用常规PID控制对灌溉液的EC值进行动态调控,有效减小水分渗漏,提高水分利用率。赵亮等[7]采用Fuzzy-PID算法设计一种温室节水滴灌控制系统,通过对温室内部土壤湿度的实时采集,结合植物的生长特性对土壤湿度进行自适应性的调节,结果表明该系统节水率达到23%,有效避免了水资源的浪费。
农业灌溉系统是一个非线性、大惯性、纯时延的系统,难以建立精确的数学模型[8],所以目前已有很多学者将不依赖于数学模型的控制算法引入到农田浇灌系统,通过恒压供水的方式改进灌溉系统的控制效果。恒压灌溉可以起到保护灌溉设备和节约水资源的作用,因此笔者将模糊控制与常规PID控制进行结合,使系统既具有PID控制的高精度特点又兼顾模糊控制的适应性强优点,并采用不同的结合方法分析恒压灌溉系统的控制效果。灌溉系统模型采用MATLAB仿真软件进行搭建,通过仿真分析灌溉系统的动态性能。
1 模糊PID控制原理
1.1 常规PID控制
PID控制是一种闭环控制,通过调节比例(P)、积分(I)、微分(D)3个参数使系统误差不断减小,其广泛应用于压力、温度、液位等各种控制过程。PID控制器以误差e(t)为输入,以被控量u(t)为输出,其算法表达式如下:
u(t)=KPe(t)+KI∫e(t)dt+KDde(t)dt(1)
式中,KP为控制器比例增益,KI为控制器积分增益,KD为控制器微分增益。
传统的PID控制是利用模拟量来实现的,即通过仪器仪表直接对模拟信号进行控制,但现代控制系统大多为计算机控制,所以需要对传统PID控制进行离散化处理,将模拟量信号转化成计算机识别的数字量信号。经离散化处理后的PID算法表达式如下:
u(k)=KPe(k)+KIk0e(k)+KD[e(k)-e(k-1)](2)
式中,e(k)为第k次的误差,u(k)为第k次的系统输出。
由式(2)可知,控制器在运行过程中需要对每一次的误差值e(k)进行累加,使积分环节占用较多的存储空间和计算性能。因此,对式(2)取增量,得到增量式PID算法表达式:
Δu(k)=KP[e(k)-e(k-1)]+KIe(k)+KD[e(k)-2e(k-1)+e(k-2)](3)
由式(3)可以看出,增量式PID不需要对每一次的误差值e(k)进行累加,控制增量Δu(k)只与近3次的误差测量值有关。
PID控制具有算法简单、可靠性高、稳定性好的特点,对于各种线性控制系统具有明显的控制效果,对于非线性不严重和被控参数固定的系统,能够兼顾系统稳态性能和动态性能的改善。但常规的PID控制参数只能依靠人工调节,如果操作人员在调整参数时操作不当,可能会使控制系统产生振荡。
1.2 模糊PID控制
模糊控制可以对复杂、难以建模的系统进行简单、有效的控制,但单纯的模糊控制不具备积分环节,常常在平衡点处产生小幅度振荡,因此可以将模糊控制与PID控制相结合构成模糊PID控制。常见的模糊PID控制有FuzzyPID复合控制和模糊自适应PID控制。Fuzzy-PID复合控制是采用的分段控制法,依据梯形隶属函数的模糊切换算法进行切换控制,在系统误差较大时,为了加快系统响应速度采用模糊控制;在系统误差较小时,为了提高系统控制精度,采用PID控制。模糊自适应PID控制是将输入给PID控制器的误差e和误差变化率ec同时输入给模糊控制器,模糊控制器通过内部的模糊规则库将PID参数的修正量ΔKP、ΔKI、ΔKD进行输出,完成对KP、KI、KD参数的在线调整。Fuzzy-PID复合控制与模糊自适应PID控制系统结构如图1所示。
在模糊控制器中,输入的独立变量常被看作向量,其分量的个数也称为维数。理论上,模糊控制器维数越多,其控制精度越高,但过多的维数会使模糊规则变得异常复杂,使得控制算法难以实现。从图1可以看出,虽然模糊控制与PID控制的结合方式不同,但二者采用的模糊控制器均为二维模糊控制器,以误差e及误差变化率ec作为输入变量。在模糊控制过程中,输入模糊控制器的变量需要进行模糊化处理,采用模糊子集覆盖模糊论域。设置较多的模糊子集会提高系统的控制精度,但也会使模糊规则数目大幅度增加,占用控制器运行空间,降低系统的准确性。因此,将模糊控制器的输入变量和输出变量均设置为7个模糊子集,其模糊集合均为{NB,NM,NS,ZO,PS,PM,PB},其中NB、NM、NS、ZO、PS、PM、PB分别代表偏差值的负大、负小、零、正小、正中和正大。
2 模糊PID控制器设计
2.1 FuzzyPID复合控制器
传统的复合控制切换是依据预先设定的阈值,当误差e达到设定值后,系统进行自动切换,但这种常规的切换方法可能会引起系统的扰动,导致控制上存在一定的缺陷,影响系统的控制效果。因此,通过模糊控制的思路,采用模糊推理的方法来实现2种控制方式的切换,使系统的切换阈值能够实现在线调整,从而提高Fuzzy-PID复合控制的在线适应性,弥补传统复合控制器的缺陷。复合控制器对控制论域分段的基本思路:在远离平衡点处,为提高系统响应速度、加快响应过程可以采用模糊控制;在平衡点附近,为了减小系统稳态误差,消除小幅度振荡,可以采用PID控制;在模糊控制与PID控制切换点附近,需要提高系统阻尼性能,避免使系统产生振荡现象。
根据相关文献的试验研究[9],当湿度误差绝对值小于2%时,采用PID控制效果更合适,当湿度误差绝对值大于5%时,采用模糊控制效果更合适。根据上述试验数据,可采用gbellmf(钟形)模糊切换隶属度函数对误差e进行模糊化处理,采用的模糊推理语言为If(e is y)then(U is PID),如图2所示。
从图2可以看出,当误差值为2%~5%时采用模糊推理的方式实现Fuzzy与PID控制的平稳切换。令输入偏差为e,模糊切换控制的输出量为λ,则PID控制的输出权重为λ,Fuzzy控制的输出权重为(1-λ),通过加权平均处理[9],最终的输出如下:
U=λUPID+(1-λ)Ufuzzy(4)
在灌溉过程中为避免设备和管网超负荷运行,管网压力要尽可能保证为一个恒定值。模糊控制器采用管网压力偏差e和偏差变化率ec作為输入量,以变频器频率f作为输出量,设计了一个Mamdani型的双输入-单输出模糊控制器。模糊控制器对输入量e、ec进行模糊化处理,再通过模糊推理,将压力转化为频率,然后利用变频器对水泵的转速进行调节,从而控制灌溉系统的管网压力。根据模糊控制器的输入输出要求,结合模糊子集的个数,构建一个trimf(三角形)输入输出隶属函数。因为在系统平衡点处PID控制的权重较高,Fuzzy控制权重较低,所以设置的模糊子集在模糊论域上呈均匀分布状态,其输入、输出模糊子集分布如图3~4所示。
模糊推理是对技术人员实际操作经验的归纳总结,它包含着输入量与输出量之间的一种蕴涵关系。常规的模糊控制基本思路[10]:
(1)当偏差是负大,且偏差变化率为负大时,为尽快消除偏差,并抑制偏差绝对值继续变化的趋势,控制量应为正大。
(2)当偏差是负中,且偏差变化率是负大时,说明偏差仍有增大的趋势,因此控制量也应为正大。
(3)当偏差为负小,偏差变化率为负大时,说明此时系统已接近稳态,控制量取正中。
(4)当偏差是正大,且偏差变化率是正大,为尽快消除偏差并抑制偏差变化趋势,控制量应为负大。
根据以上控制思路,将模糊推理过程以观测窗形式展示如图5所示。
2.2 模糊自适应PID控制器
根据模糊自适应PID的工作原理,以管网压力偏差e和偏差变化率作为模糊控制器的输入量,以ΔKP、ΔKI、ΔKD作为模糊控制器输出量,设计一个二维模糊控制器。结合模糊控制器的控制特点,为了使控制器在平衡点处的控制动作更精确、细腻,可以将平衡点附近的模糊子集隶属函数曲线设置更为陡峭,提高控制系统的灵敏度。远离平衡点处的模糊子集使用较为平缓的隶属函数,提高系统的响应速度。输入、输出模糊子集分布的隶属函数曲线如图6~7所示。
归纳总结实际的操作经验,模糊自适应PID控制的规则思路如下[11]:
(1)当偏差e的绝对值较大时,为了加快系统的响应速度,应增大KP的取值,以减小系统的时间常数和阻尼系数;同时,为了避免系统在刚开始时引起超范围控制,KD取值应较小,以便加快系统响应;KI取值可为0,避免出现较大的超调现象。
(2)当偏差e的绝对值处于中等大小时,KP取值应较小,使系统的超调量在可控范围内;KD的取值要恰当,以保证控制系统的响应速度;KI的取值可适当增加,但避免过大。
(3)当偏差e的绝对值较小时,为确保系统拥有良好的稳态性能,KP和KI取值要恰当;同时,为避免控制系统在平衡点处产生振荡现象,KD取值应较小。
根据上述控制思路编辑模糊控制器,并将控制规则库通过观测窗进行输出,ΔKP、ΔKI、ΔKD观测窗如图8所示。
3 模糊PID控制器的Simulink仿真
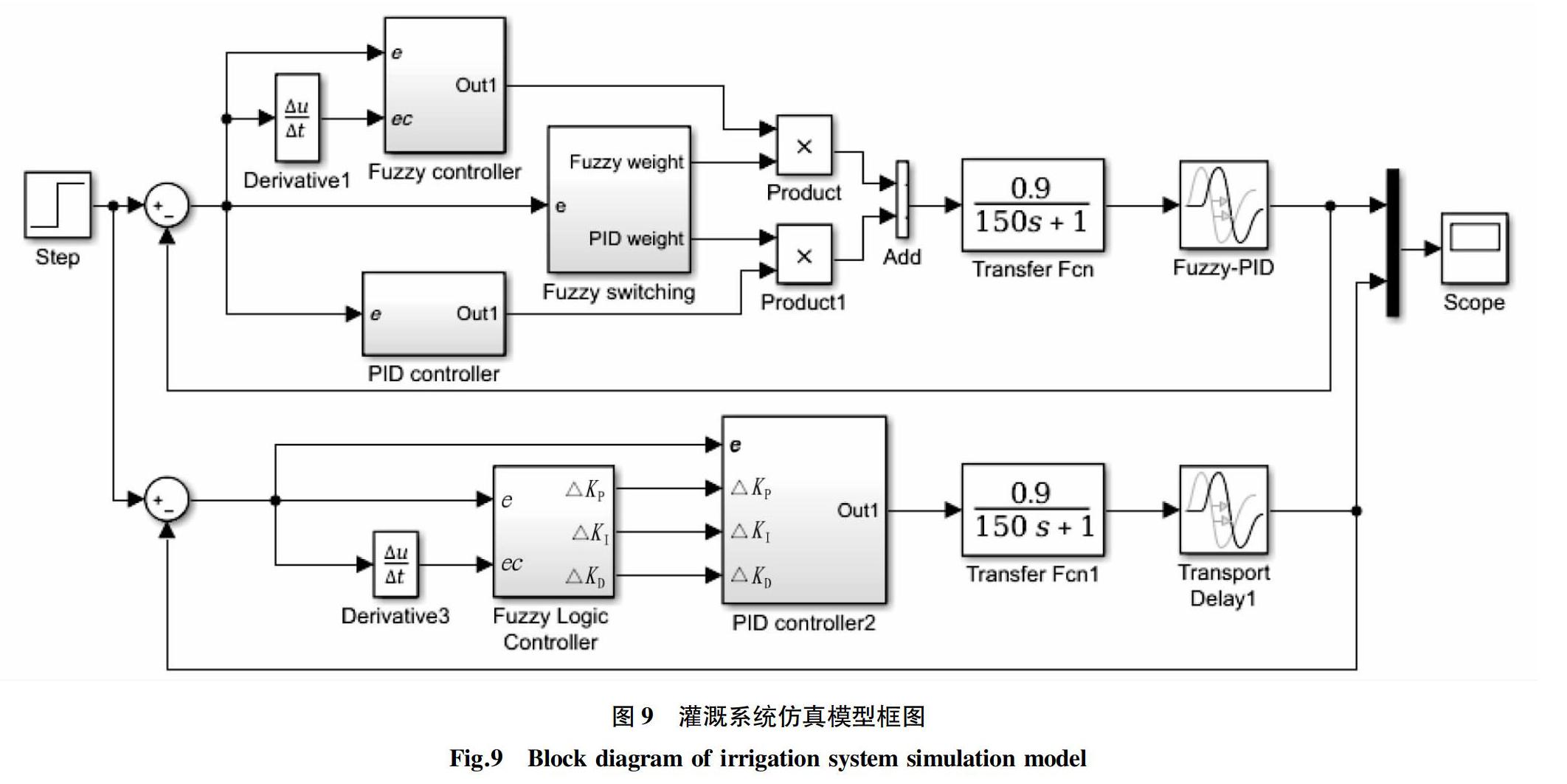
为对比Fuzzy-PID复合控制器与模糊自适应PID控制器之间的运行效果,根据控制原理在MATLAB软件中搭建仿真模型,并进行仿真运行,仿真模型框图如图9所示。
图9中Fuzzy switching模块内部结构图如图10所示,Fuzzy switching模块主要是计算Fuzzy控制与PID控制权重的分配,该模块以偏差e为输入量,结合模糊切换隶属度函数,输出量PID weight为PID控制权重λ,Fuzzy weight为Fuzzy控制权重(1-λ)。
根据管网的承压能力和浇灌区域的实际要求,仿真设置管网压强恒定值为0.6 MPa[12],系统仿真曲线图如图11所示。
由图11的系统仿真曲线可计算出Fuzzy-PID复合控制、模糊自适应PID控制、PID控制的系统超调量σ和调节时间τ,调节时间按达到稳态误差的5%以内计算,结果如表1所示。
从表1可以看出,常规PID控制的超调量σ最大,约26.7%,上升时间约80 s,但调节时间过长,约160 s;Fuzzy-PID复合控制无超调现象,上升时间约120 s,调节时间约100 s,与常规PID相比控制效果显著提升;模糊自适应PID控制调节时间最短,约70 s,上升时间约95 s,但有超调现象,超调量σ约10%,控制效果优于常规的PID控制。
结合模糊PID控制原理对比仿真结果可知,Fuzzy-PID复合控制采用模糊切换的方式对Fuzzy控制和PID控制进行平稳切换,消除了传统切换控制方式所产生的扰动现象,提高了Fuzzy-PID复合控制器的在线适应性;模糊自适应PID控制在系统平衡点处采用陡峭的隶属函数,完成了PID控制参数的在线修正,虽然控制效果优于常规PID控制,但仍有超调现象产生,在系统的整体调节时间上模糊自适应PID控制优于其他2种方案。
4 结语
结合以上恒压浇灌系统的MATLAB仿真数据分析可知,将模糊控制与常规PID控制进行结合可以兼顾二者的控制优点,在控制领域有广泛的应用价值。模糊控制与PID控制有多种结合方式,控制效果也不尽相同,但具体的结合形式要根据系统控制要求进行设计。从该试验中模糊PID控制效果来看,模糊自适应PID控制可以应用于响应速度快、对现超调现象要求不严格的浇灌系统;对于要求无超调现象的浇灌系统可采用FuzzyPID复合控制,但系统响应速度会有所降低。该仿真试验结果表明模糊PID控制效果优于常规的PID,但具体的模糊PID控制结合方法和参数设置还需深入研究。
参考文献
[1] 刘苗苗,杨丽,李斐,等.基于数值模拟的新疆灌溉水田间入渗系数研究[J].中国农村水利水电,2017(12):17-21.
[2] 吴迪,李余进,黄兆波,等.模糊PID和变频器在地下恒压灌溉控制系统的应用[J].自动化与仪表,2019,34(4):19-23.
[3] 刘洪静,李黎,高金辉.基于模糊PID控制的节水灌溉智能控制系统设计[J].节水灌溉,2020(2):88-91,95.
[4] 许景辉,王雷,谭小强,等.基于SOA优化PID控制参数的智能灌溉控制策略研究[J].农业机械学报,2020,51(4):261-267.
[5] 李嵩,周建平,许燕.基于PSO优化Fuzzy-PID精量灌溉控制系统设计[J].节水灌溉,2019(3):90-93.
[6] 王琨琦,赵倩,贾冬冬,等.基于PLC控制的单通道水肥灌溉系统构建与决策方法[J].北方园艺,2019(11):158-164.
[7] 赵亮,瞿少成,刘雪纯,等.基于Fuzzy-PID的温室节水滴灌控制系统[J].节水灌溉,2019(7):116-120.
[8] 於沈刚,马明舟,岳雪峰,等.模糊PID智能灌溉控制器的设计及MATLAB仿真[J].节水灌溉,2018(5):86-89.
[9] 邵鹏飞,曹江涛,桑红,等.Fuzzy-PID复合控制在温室节水灌溉中的應用[J].传感器与微系统,2016,35(8):144-147.
[10] 孙宜田,李青龙,孙永佳,等.基于模糊控制的水肥药一体化系统研究[J].农机化研究,2015,37(8):203-207.
[11] 段科俊,李明.基于混合隶属度的模糊PID温室控制[J].林业机械与木工设备,2019,47(11):32-37.
[12] 田莉,赵先锋,李磊磊,等.主管压差式水肥一体化灌溉系统的设计与试验[J].农机化研究,2020,42(2):101-105.
