地下管廊小型巡检机器人设计研究
2021-06-17李昌朱婷
李昌,朱婷
(安徽新华学院电子工程学院,安徽合肥,230000)
0 引言
在电力行业,人工的效率相对于机器人比较低下,且因为一些工作环境恶劣、危险,容易对人身造成伤害,急需要机器人代替人工进行工作。尤其在用电密度较高,装备种类和数量众多,而电力职员数量少,工作量比较大的城市,机器人在电网利用的技术研究具有重大的意义,其中地下管廊巡检需求最为火急。
地下管廊中电缆铺设数量多、范围广,人工巡检效率低,重复性高且较为繁琐,且存在漏检、误检的情况;巡检人员必须为具有一定专业素养的电力人员,而电力人员数量少,运维工作量比较大。
1 地下管廊小型巡检机器人设计
(1)采取机器学习(knn)算法对表计内容进行识别、深度学习检测算法(SSD)快速对目标进行识别等技术。创造性的将深度学习的 SSD 目标定位方法和电力机器人作业进行结合,能够对故障位置进行精准定位,拥有绝对的技术竞争优势。
(2)且针对局部放电,我们根据实际情况采用超声波法、特高频方法、暂态地点波方法三种不同的方法实现局放定位。
■1.1 机器学习(knn)算法,自主检测故障
机器人运用OpenCV软件库来开发视频采集程序,实现对地下管廊视频信息的及时收集;为实行地下电缆巡检机器人对地下管廊的自主巡检作业,增加巡检的精度和效率,我们将视觉识别运用到管廊巡检作业上。基于视觉识别的地下巡检机器人可以自动搜索、定位、识别地下管廊中的电气设备,并通过图像处理算法实现对设备表计内容的读取。
识别过程主要包括:图像预处理、knn数字识别、交叉验证确定“K”值三个部分。
(1)图像预处理
图像预处理大致分为五个步骤:去噪,仿射变换,边缘提取,ROI提取,腐蚀膨胀:
①图像去噪:在摄像头采集图像过程中,如图1所示,由于管廊中设备表计多存在覆灰、水雾或光线不足等情况,导致机器人获取的图像不清晰,影响后续分析,因此需先对图像进行降噪和增强处理。为了在滤除噪声的同时,很好地保存图像中的边沿信息,采取双边滤波的方法来降噪,双边滤波比经常使用的高斯滤波多了一个高斯方差sigma-d,所以在边沿四周较远的像素不会影响到边沿上的像素值。

图1 机器人获取到的图像
图2 图像去噪、增强
② 边缘检测:在地下管廊中,设备表计中的数字多为红色,周围环境中的大部分是金属材质,且表计窗口易发生镜面反射。所以我们利用边缘特点来进行电力表计设备的识别定位。根据线上图像的成像特点,采用Canny边缘检测器来进行边缘检测。
③ ROI提取:ROI(Region Of Interest)感兴趣区域提取,将图像中有效视
野分离出来,缩小识别范围,减轻计算负担,大大提高图像处理的效率和精度。
图3 ROI获取、仿射变换

图4 图像腐蚀膨胀、切割
④ 图像仿射变换:因为摄像头采集的图像其实不绝对水平,因此采用仿射变换对图像进行旋转矫正,首先确定获得的图像都是围绕图像中心点产生了旋转变换,根据仿射变换中的旋转变换,利用旋转变换矩阵对倾斜的图像进行调整。
⑤ 图像腐蚀膨胀:由于设备表计一般采用八段数码管显示,所显示的数字由LED拼接而成,在段与段之间存在缝隙,并不连贯。通过对图像的腐蚀膨胀处理,将本来不连贯的数字连贯起来。
(2)基于knn算法的数字识别
knn算法也称为k邻近算法,是一种基本分类与回归方法,也是手写数字识别的基础算法之一。knn算法运用在假定已准备好一个训练数据集,此中每个实例的种别是预先指定的。分类时,对新的实例(测试数据集)遵照K个最近邻的训练实例的类别,并且根据大多数表决等方法进行预测。knn算法的三个基本元素是K值的选择、距离度量及分类决策规则,在一般情况下,训练集图像是已经裁剪成统一规格且周围没有空缺空间的二值化图像。
交叉验证是算法中常常使用的模型精度测量方法,是用来验证分类器性能的一种统计分析方式。团队采用了交叉和平均的思想,通过交叉验证k近邻算法得到评估结果,并应用于模式识别,在提高模型稳定可靠性的基础上,提高了识别的准确率。
■1.2 精确定位算法
传统的方法使得定位出现不准,为提高定位精度,提出了一种基于磁性开关的双模式匹配定位算法。在轨道式机器人悬挂的工字轨道上每间隔 1m 打入一颗定位螺钉用于里程校正,机器人搭载的磁性开关靠近定位螺钉时发送触发脉冲,微处理器接收脉冲信号后自动将里程计数据进行校正以消除误差。当机器人获得工作人员下达的目标行驶位置后即对目标里程进行速度-位置模式匹配:将目标里程分为速度模式下行进与位置模式下行进两个区间,并依靠磁性开关的触发信号判断速度-位置行进区间的切换点。图5为精确定位算法示意图。在重要巡检点或者特殊地形处(转弯、爬坡)等放置可靠性更高的RFID 标签进行目标位置识别。

图5 精确定位算法示意图
■1.3 海量数据分析,预测电缆寿命
传统的阈值鉴定方法已经过时,因此我们采取一种基于时间序列分析等大数据分析的异常检测方式,从数据的演化过程、数据联系关系的全新角度实现对异常的检测。而且经由时间序列模型和自适应神经网络对历史数据举行挖掘,并且通过数据对实践的动态变化规律用转移概率序列进行表示。提出不正常的部分检测系统,并使之适用于电气设备状况检测数据流,实现数据流中不正常的部分快速检出。从而,基于机器人数据库的海量数据数据,建立巡检机器人对管廊故障进行及时预警。
(1)大数据采集
该系统中机器人所采集的地下电缆设备运行数据包括电气参数和非电气参数两类。此中电气参数主要有电流、电压、功率、频率等模拟量,断路器状况、隔离开关位置、继电保护动作信号等开关量以及表示电度的脉冲量等。而非电气参数种类较多,各种设备局部温度、局放等其它信号。
此外,系统的大数据来源除了管廊设备,还来源于相应地下电缆设备生产厂家、各地电力科学院的多年试验数据,形成一个双向通讯和数据共享网络,进一步扩大数据收集类别和范围,利于接下来的数据分析以及数据挖掘。
(2)大数据预处理
为了从这些海量数据中挖掘出对地下电缆设备检测起决定性作用的信息,也一样需对这些海量数据进行层层筛选,但这类操作需耗费大量时间,故选择对这些海量数据进行预处理,例如数据清洗,从而提高数据质量和价值。
大数据统计分析:
① 单状态量数据流特征量的提取
我们对于多维参量融合的问题,采取基于密度的聚类算法对多维的在线监测数据进行聚类。
② 大数据挖掘预测
机器人系统采用的云计算采取MapReduce分布式设计方法来实现高性能计算, MapReduce分布式处理技术非常适合用于处理大数据。它是将快要处理的数据拆解成Map(映射)和Reduce(化简)两种方式:首先是运用映射程序将大数据切割成互不相关的部分,其次为了达到高性能的效果我们是将其分配给大量的计算机处理;最后将得出的结果通过化简程序将结果集合,输出给用户需要的结果。
通过聚类融合,将数据进行归一化,得出各个状态量标准值,从而设立一套完整的评估体系,通过大量数据的深度学习训练,使得评估体系越来越坚强和完善。之后只需将每个地下电缆巡检机器人收集到的数据经过预处理后输送如评估系统中进行评分,检测出设备异常状态,工程师及时作出方案对管廊电气设备进行实时控制。
■1.4 局放定位检测传感器
由于局部放电对地下管廊设备的影响力巨大,必须对局部放电进行监测和评价。在局部放电过程中,能量主要以电磁、声波和气体形式释放,因此我们可以根据实际情况采用,超声波法、特高频方法、暂态地点波方法三种不同的方法实现局放定位,如图6所示。
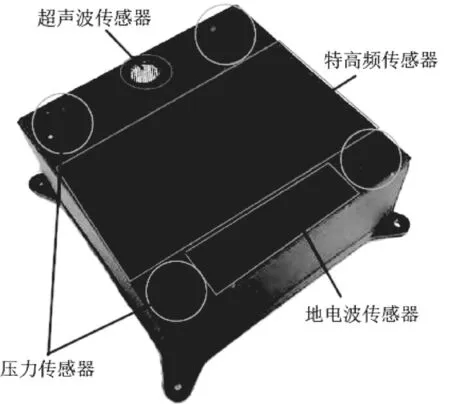
图6 多功能局放检测仪
该局放定位检测传感器的主要技术参数如表1所示,传感器检测到的电缆局部放电图谱如图7所示。

表1 传感器主要技术参数表
2 结语
地下巡检机器人必定是未来众多行业领域中代替人工作业的一种重要工具,在应用的范围上将更加广泛,对于全面代替人工也是具有非常重要的意义。采用地下管廊巡检机器人协助甚至代替人类进行地下巡检作业, 减轻了人力的劳动和在恶劣环境下工作的风险,同时又使城市的运行更安全。
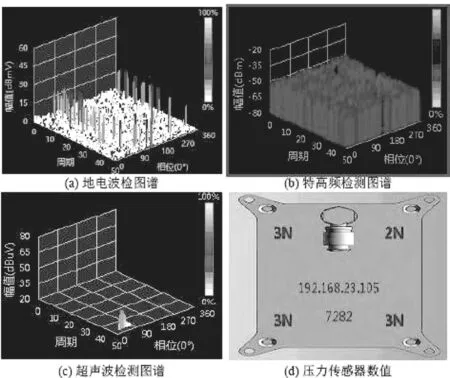
图7 电缆局部放电图谱
