用于疏浚工程泥浆密度测量的电阻层析成像技术∗
2021-06-16崔自强张倩夏子涵高凯王化祥
崔自强张 倩夏子涵高 凯王化祥
(天津大学电气自动化与信息工程学院,天津300072)
在疏浚工程中,气液固多相流动普遍存在于各个环节,泥管道中泥沙比例/混合密度将直接影响挖泥船施工系统的挖掘效率和运送效率[1],这使得泥浆密度的在线检测显得尤为重要。
通常,泥浆密度测量方式有差压法[2],电导探针法[3],超声法[4]。差压法通过检测压力降反映流体密度变化,通常需要设置节流件或竖直管段,而环境振动或压力探头堵塞会导致系统误差。超声法检测透射超声的衰减测量密度,然而,液固流动为非均质流且相界面复杂,声波在相界面处的反射及折射导致其并不适合液固两相流的密度检测。通常,电导探头可获得其探头处的局部电导率,利用物质电导率与密度的对应关系确定密度,由于探头侵入流体内,对于存在较多砂石的固相液固两相流并不适合。
目前,在挖泥船上应用最为广泛的是射线密度计。基于γ射线的密度计可测量液固混合物的密度[5],虽然射线能量高,穿透力强,但其劣势也很显著,如:①因使用放射源(铯-137或镅-241),对于船上人员健康都构成潜在的风险;②世界各国和地区对于环境保护和公共安全的日益重视,也使得射线密度计的使用范围受到了极大的限制,成为影响国际疏浚市场竞争/准入的重要门槛。与之相比,X射线法仅在使用过程中产生电离辐射,可用部分替代γ射线;此外,基于X射线的计算机断层扫描方法(Computer Tomography,CT)[6]可用于获取密度分布。然而,工业射线CT使用机械扫描的方式,响应速度较慢。通常,疏浚工程中液固流动的平均速度约5 m/s,最高可达到20 m/s;因此,射线CT并不适合流体测量。
综上,目前泥浆密度测量方法在测量实时性、精度、稳定性以及安全性等方面存在较大的局限性。20世纪90年代发展而来的电阻层析成像(Electrical Resistance Tomography,ERT)技术为泥浆密度在线测量提供了一种全新的解决途径。ERT技术基于电磁敏感原理,通过管道/装置外围的传感器阵列获取被测场域内不同电导率介质的分布,进而可计算出传感器截面的液固密度分布。在本研究中,初步的实验表明,ERT测量数据与射线密度计具有良好一致性,证明其替代射线密度计的可行性。这对于提高疏浚工程的自动化程度,实现无核化检测、智能疏浚具有重要意义。此外,ERT方法具备实时可视化的功能,可对疏浚管道内的流动进行成像,对于及时了解和预测管道内流动状态具有现实意义。
1 原理
1.1 ERT基本原理
ERT技术因其快速、低成本、无辐射等特点在多相流过程参数检测领域得到广泛的应用[7],用于各种导电性液体为连续相的多相流体测量,如自来水、海水和油等[8]。
通常,ERT系统包括用于激励和测量的电极阵列、数据采集与处理单元、图像重构与分析显示单元,其系统结构如图1所示。通过管道电极阵列测量值,并采用适当的图像重建算法,ERT可计算出管道流体的电导率分布情况,并据此得到液/固两相的体积含率等分布参数。
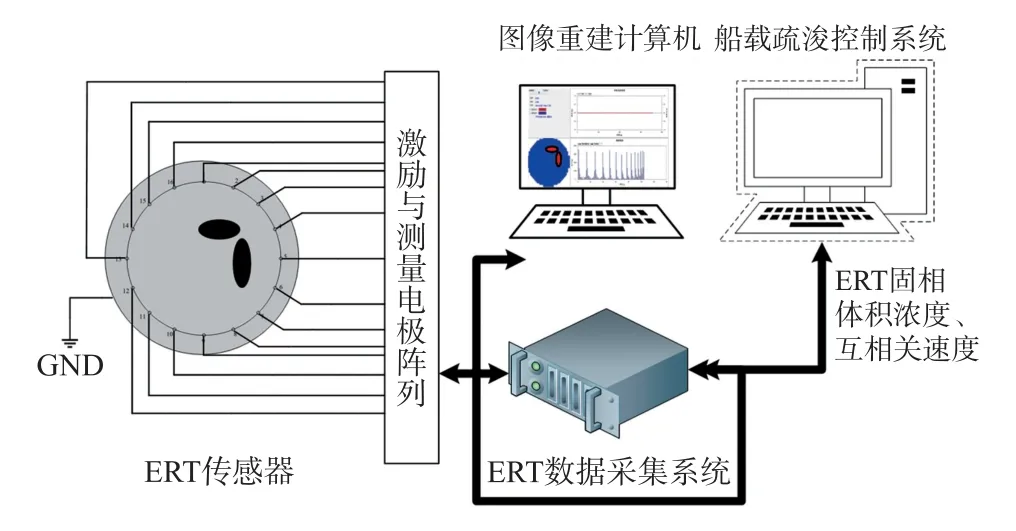
图1 典型ERT系统的结构图
ERT的测量模型可由麦克斯韦方程描述,即:

式中:H为磁场强度,J为电流密度,E为电场强度,B为磁感应强度,D为电通量密度,σ表示电导率,μ表示磁导率。
因ERT通常采用较低频率激励,场域内感生的电流的源或汇可忽略;仅考虑在其传感器阵列上施加的电流/电压对场域电势分布的影响,可以得到泊松方程:

通过施加特定边界条件作为约束,可以确定ERT场域内各处的电势分布[9]。通常,对于电流激励的ERT,其边界条件须包含激励电极上的电流:

以及参考点电势:

以上,分别称为Neumann和Dirichlet边界条件;其中,E-,E+及ER分别表示激励电流流入及流出的电极及参考电极。
ERT场的电势分布可通过有限元方法求解,在获得场域内的电势后,可进一步计算ERT传感器的灵敏度矩阵[10]。通过扰动法可得到各局部区域的灵敏度系数,但计算量偏大;目前,基于Geselowitz灵敏度定理应用广泛,其计算式如下:

式中:Si,j(x,y)表示当第i通道作为激励、第j通道进行测量时在(x,y)的灵敏度;φi(x,y)和φj(x,y)分别为第i、j通道激励时的电势分布;Ie为激励电流。
在ERT中,线性反投影算法以其简捷、快速的特点被广泛应用于ERT图像的在线重建;而迭代算法计算量较大,但一般可提供更优的空间分辨率[11]。以同时迭代法(Simultaneous Iterative Reconstruction Technique,SIRT)为例,其迭代过程可描述为:

式中:k为迭代步长,β为松弛因子。
ERT的图像重建,在数学上称为逆问题求解,是利用灵敏度矩阵这一桥梁由ERT测量数据(共n(n-3)/2个)推导出场域内的电导率分布,并基于电导率与密度的关系,可实现泥浆密度的测量。
1.2 混合密度计算

图2 ERT与射线密度计测量原理对比
γ射线密度计采用放射源(铯-137或镅-241)与探测器(CdZnTe)对向放置的方式,如图2(a)所示,窄带射线在管道内的衰减可由Lambert-Beer公式确定[12]:

式中:I为射线通过介质后的强度;I0为无干扰介质时的初始射线强度;μm为介质的吸收系数仅与所测介质有关;x为线透射通过被测材料的厚度;ρ是吸收物质及介质的密度。
进而可得:

对于特定的γ射线密度计,μm,x,I0为常量,因此可通过测量I而求得密度ρ。采用闪烁探测器(CdZnTe)检验穿过介质后的剩余γ射线,将其转换为电量的变化,并通过电子电路的处理,便可得到所测物质的密度。
由此可知,射线密度计测得的混合密度实际反映射线路径上介质密度的平均值,而非整个管道截面内介质的密度分布。亦即,射线密度计的精度实际上严重依赖于其放射源和探测器的布置以及管道内液固两相流的流型分布。
与之不同,ERT的阵列测量数据包含的信息实际上覆盖整个场域,如图2(b)所示。ERT重建图像中各像素的值表示其所在位置的电导率值,通过简单阈值法可确定其敏感区域内液相及固相的体积分数α0及α1。在液固混合物中,混合电导率数值可由Maxwell-Garnett公式[13-14]确定:

式中:σmc为混合物的有效电导率,可由ERT图像获得;σ1为液相电导率;σ2为固相电导率。
对于液相为海水的情况,其电导率一般为3~4 S/m;固相的主要成分为泥沙,故其电导率可近似为0,则可得各像素处液相的体积分数:

根据ERT重建图像可计算各像素点内固相的体积分数,进而可得到整个传感器截面内固相体积分数,即:

式中:α0,i,Ai分别为第i个像素的灰度及面积,A为管道截面积。
通过固相体积含率可推导出流体的混合密度如下:

式中:ρl和ρs分别为液相和固相密度。一旦液固两相的密度给定,混合密度ρ仅由固相体积含率αERT确定。
2 实验结果
2.1 ERT仿真分析
使用多物理耦合软件COMSOL Multiphysics建立ERT传感器模型并进行仿真分析。在数值仿真中,被测泥浆分布及图像重建结果如表1所示,被测分布包括分散流(#1-#3)和层流(#4-#6),“被测物分布”所在行中,图中所标注“液相σw”代表高电导率材料(淡水/海水),固相σs代表低电导率材料(泥沙)。
数值仿真验证中的传感器结构、电学参数及测量模式:
①传感器结构:管道内径450 mm,带绝缘衬里;电极直径2 mm,个数为16;
②电学参数:电极材料为铜;液相电导率分别为0.004和4 S/m(模拟淡水及海水条件下的电导率),对应密度为1.0 g/cm3和1.03 g/cm3;固相电导率为0.16 S/m,密度为1.9 g/cm3;
③ERT采用相邻电极激励、相邻电极测量模式;考虑互易性后,其有效测量值的个数为n(n-3)/2,其中n=16为电极个数。由此得有效测量值的个数为104个;通常,ERT使用恒定幅值的正弦交流电流作为激励信号,其幅值为20 mAp-p,激励信号频率为128 kHz。
从表1中“图像重建结果”一栏分析,已将电导率进行归一化处理,从图像分布结果可以看出,ERT系统能够较好地重建出多个测量物的在管道截面上泥浆的分布,包括分散流及层流状态;此外,在淡水和海水两种电导率相差较大的情况下,图像重建结果无较大差别。
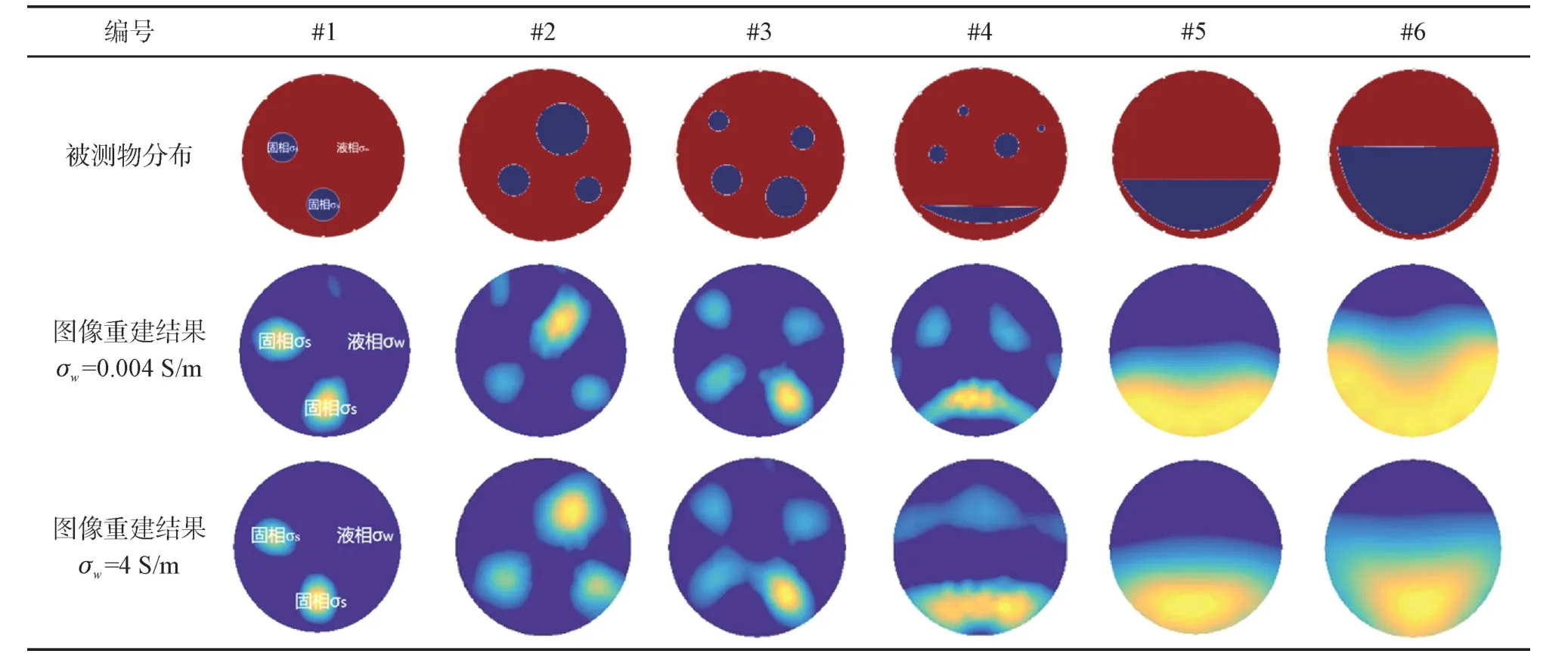
表1 仿真图像重建结果
式中:ρtheory为理论固相密度,由建立的模型得到;ρERT为ERT图像重建后经计算得到的固相密度。
更进一步地,为了定量衡量测量值与理论值之间的偏差,采用均方根误差(Root Mean Square Error,RMSE):
通过ERT所测得的泥浆密度ρERT与理论值ρtheory的对比,泥浆密度的RMSE结果如表2所示,在σw=4 S/m情况下,RMSE结果低于0.0578;而在σw=0.004 S/m情况下,RMSE结果低于0.0495。

表2 仿真测得泥浆密度RMSE结果
因此,从数值仿真中可以得到:对于电导率差别较大的水质,ERT系统可在泥浆测量中得到较为准确的泥浆密度,并可以较好地呈现管道截面上泥浆分布信息,进一步说明ERT在不同水域下具有一定的适应性,可将ERT应用于疏浚工程的泥浆密度测量。
2.2 现场实验
双截面16×2电极ERT传感器安装在水平输泥管道上(管子直径D=450 mm),安装在管道示意图如图3(a)所示,现场图像重建计算机界面如图3(b)所示。
在现场海水环境(σw=3.3 S/m)实验中,采用了传统的“四电极”法,取得104个测量值,即为提供测量数据U型曲线,可实时显示在图3(b)的“测量数据”框图中,原始的电导率测量数据实时更新,一方面提供测量现场状态,另一方面可在传感器测量出故障时便于查看电极的工作状态;提供实时泥浆浓度曲线对比图,如图3(b)中的“浓度曲线”,包括由ERT系统得到的结果,以及射线密度计所测得的结果,同时也将真空数据值实时显示,三种曲线已在图例中进行标注。提供ERT系统图像重建的泥浆分布结果,通过截面实时成像图与测量数据结合判断,使整个测量系统更具有准确性。

图3 现场ERT系统
现场测量过程中,对ERT传感器在满水条件下进行参考值标定。上位机以此为参考值进行图像重建,选用其中连续的800帧测量数据,计算出的泥浆固相体积含率(Solid volumetric ratio)如图4所示。一方面,ERT数据能够快速跟踪γ射线密度计,且在数值上也体现出较好一致性;另一方面,泵吸入真空数据作为现场施工中反映管道流体密度变化的重要参数,其与ERT数据的变化趋势一致,也佐证ERT用于泥浆密度测量的可行性。

图4 实验结果分析
3 结论
本工作研究不同水质/泥质(电导率)对ERT测量的影响,并通过数值仿真和现场实验验证ERT方法用于泥浆密度测量的有效性和可行性。随着ERT测试方法的不断改进和完善,并建立良好的标定体系,其有望完全替代γ射线密度计,成为诸多液固混输过程混合密度测量的重要手段。
