基于自适应阈值的公路裂缝自动检测方法研究
2021-06-16段明义崔奥杰张晓方张宇凯恽宣任
段明义,崔奥杰,张晓方,张宇凯,恽宣任
(郑州工程技术学院信息工程学院,河南郑州,450044)
0 引言
当前并没有一种方法能够对公路上产生的细小裂缝问题进行高精度的检测,因此造成检测方法效率低的现象发生[1]。自适应阈值算法是一种利用图像当中的局部阈值替换掉全部阈值从而对图像中的信息进行计算的方法。当前自适应阈值算法在应用过程中的主要作用是对颜色差异不明显的图像进行识别,因此针对公路当中不明显的裂缝,本文将开展基于自适应阈值的公路裂缝自动检测方法研究。
1 基于自适应阈值的公路裂缝自动检测方法设计
■1.1 公路路面图像自动采集
选择CCD 工业相机,利用其实时拍照功能,进行公路裂缝图像的自动化采集,为了确保获取图像的清晰度,按照相机的阵列坐标轴,构建公路坐标图像,此过程中考虑到图像的获取可能受到外界相关信息的干扰,因此提出使用CCD 工业相机建立公路裂缝二维面阵的方式,进行公路全程图像的识别。
为了避免获取的图像信息存在曝光的问题,应在获取图像后,立刻将图像上传至以太网序列中,按照上机位传输端信息分布的特征,实现对图像的高效率上传[2]。考虑到实地考察工作的恶劣性较强,公路的整体运行环境较差,因此可认为获取的公路裂缝图像中可能存在较多的无用信息,包括环境噪声、车辆行驶干扰信息等。为了满足后期对公路裂缝的标注需求,降低无用信息对后续检测工作实施的干扰,需要对存在噪声的图像进行标记处理,并根据信息的标记,对指定图像进行除杂降噪处理。假定噪声在图像中是以脉冲噪声的方式存在,因此可将获取的噪声信息近似看作高斯噪声[3]。按照图像标准化平滑处理方式,对自动采集的公路裂缝图像进行处理。处理过程可用如下计算公式表示。

公式(1)中,w(x,y) 表示为经过平滑处理后的公路路面裂缝图像;(x,y) 表示为处理后图像中存在裂缝问题点坐标;m表示为公路路面平整信息的数据集合;q表示为相关处理行为;z表示为使用CCD 工业相机自动获取的图像信息。根据上述计算公式,输出完成处理的公路裂缝图像,基于此,完成对除杂去噪公路裂缝图像的获取。
■1.2 基于自适应阈值的公路图像移动平均分割
完成对公路裂缝图像自动采集后,为了进一步减少公路上的光照强度对检测效果的影响,结合自适应阈值,沿着提取图像的扫描线进行移动平均值计算[4]。图1 为扫描模式下公路图像移动平均分割逐线执行示意图。
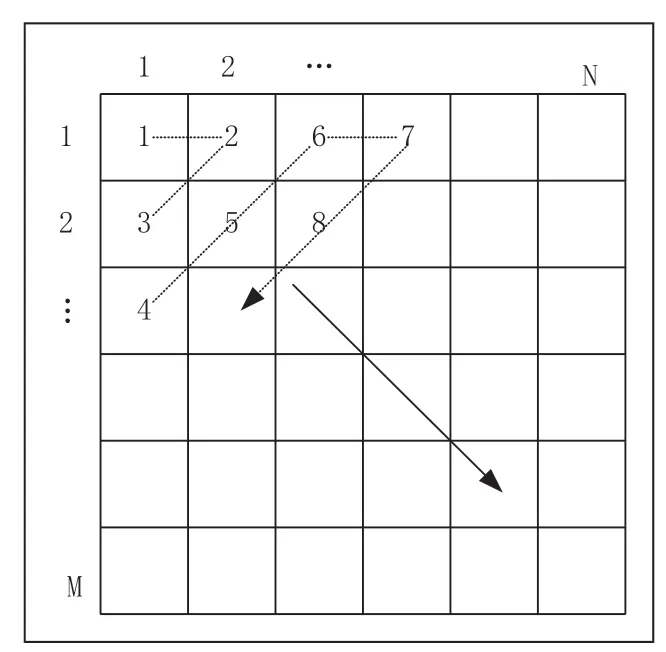
图1 扫描模式下图像移动平均分割逐线执行示意图
如图1 所示,假设Lk表示为在扫描顺序中,第k 步时点的灰度,对该灰度点按照公式(2)进行移动平均值计算:

公式(2)中,n表示为用于计算平均值的点数。公式(2)中,M(k)得出的计算结果还应当与Zk/n 数值相同。通过移动平均阈值分割的方法,对公路裂缝图像的处理,可保证在噪声较小,并且灰度不均现象降低的前提条件下实现对公路裂缝的提取,有利于后续公路裂缝自动检测与定位的精度[5]。在实际应用过程中,由于移动平均方法中的阈值是人为设置的,因此在针对不同图像进行处理的过程中表现出的效果会存在较大差异。由于公路裂缝在图像当中的灰度比周围其他未出现裂缝位置的像素相对较低,因此使用传统设备在获取图像时会受到光照不均匀的影响,使得最终获取到的图像更容易出现过度分割现象[6]。因此,针对上述问题,本文采用一种粗分割的方法,对公路图像移动进行平均分割。由于粗分割不会受到灰度不均匀的影响,因此能够在分割过程中提取到更加完整的裂缝图像信息。通过粗分割得到的二值图像其噪声与一般分割方法相比更低,因此更有利于后续对分割图像进行处理,方便对公路裂缝进行检测和定位从而进一步降低本文提出的基于自适应阈值的公路裂缝自动检测方法的复杂程度。
■1.3 公路裂缝自动检测与定位
结合视觉显著性,将其融入到公路裂缝图像当中的标记数字定位当中,结合普残差显著特征算法,在一定的频率域当中获取到公路裂缝的log 谱,以此在公路裂缝图像当中构建有关裂缝和细小裂缝的显著图像。由于在图像处理及监测领域当中,通过冗余信息,能够更加快速的反映出在图像统计过程中存在的各类变化特征,将带有变化特征的区域在公路裂缝自动检测过程中即可看作是公路存在裂缝和区域,不带有变化特征的区域,即可看作是公路不存在裂缝,能够正常稳定运行的区域。
最后,再利用卷积神经网络,对检测并定位到的公路裂缝图像表现出的具体特征进行自主学习,并确保图像当中的所有细节特征均保留的前提条件下,降低对检测方法的特征识别训练数据量。对于可能存在变化特征的图像,还需要进行相应的灰度化处理,并将上文当中提出的自适应阈值计算的规格进行转变,变换为40×40 的图像,以此完成对图像的归一化处理。再将数据作为输入层中的数据,利用相同的卷积核对其相应的裂缝特征进行提取,采用8 个10×10 的卷积核,对40×40 的图像进行平均划分,得到最终的特征图像。在检测输出层当中,添加365 个神经元,并将其彼此相互连接,从而构成一个720 个连接线的网络结构。通过输出层当中得出的映射可利用线性特征对其进行裂缝定位,以此实现对公路裂缝的自动检测。
2 实验论证分析
■2.1 实验准备
实验选用某地区公路作为实验对象,该公路整体长度约为128km,贯通整座城市,公路路面的占地面积约为1368km2,分别利用本文提出的基于自适应阈值的公路裂缝自动检测方法和传统检测方法对该公路裂缝进行自动检测。实验过程中,选用该公路8 段公路路面作为实验检测区域。在该检测区域当中包含了多个不同深度、不同数量的裂缝。8 段公路路面的裂缝平均深度为0.165m,最浅为0.057m,最深为0.195m。其裂缝的平均长度为0.355m,最短为0.097m,最长为0.483m。为保证实验结果的客观性,实验过程中,两种检测方法均通过多态光谱摄像机对公路路面图像进行拍摄,并对摄像机设置相同的拍摄参数:摄像机像素为1200 万,分别率为85DPI,拍摄频率为6.83Hz,拍摄周期为15s。分别利用电子表格对两种检测方法检测到的公路裂缝数量、深度等参数进行记录,并将其与该公路实际的裂缝情况进行比较。通过电子表格记录的内容,对比两种检测方法的检测平均相对误差,并将其作为实验结果进行输出。以此,完成对本文公路裂缝自动检测方法和传统检测方法的对比。
■2.2 实验结果分析
按照上述实验准备,完成两种检测方法的实验,并将实验结果进行记录,将计算得出的两种方法平均相对误差与最大误差允许范围进行比较,得出如表1 所示的实验结果对比表。
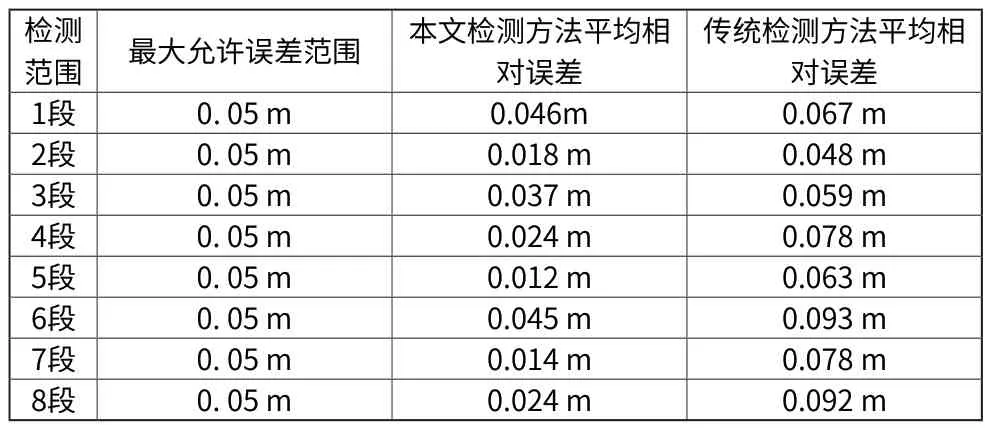
表1 两种检测方法实验结果对比表
根据表1 中的数据得出,本文检测方法的平均相对误差明显低于传统检测方法的平均相对误差,并且本文检测方法的检测精度均低于最大允许误差范围,而传统检测方法仅在第2 段范围内实现了对公路路面裂缝的高精度检测。因此,通过对比实验证明,本文提出的基于自适应阈值的公路裂缝自动检测方法在实际应用中能够有效提高检测结果的准确性,并保证检测结果的精度满足公路交通的高精度要求。因此,将本文提出的检测方法应用于实际能够为公路交通在后续公路维修、公路养护等阶段,提供可靠的数据支撑,以此不仅可以提高公路的运营质量,同时还能够为公路交通安全提供保障。
3 结束语
本文针对当前公路上常出现的裂缝影响道路运行问题,提出一种结合自适应阈值的全新的检测方法,并通过实验证明了该方法的实际应用效果。将本文提出的检测方法与实际公路施工、维护等情况结合,可以着重改善公路裂缝监测的错误识别率高、细小裂缝监测不到位等问题。同时,本文提出的检测方法在有效降低了错误识别率的基础上,能够更好地对细小裂缝以及微灰度差异的裂缝进行精准检测。通过本文论述,可将自适应阈值引入到公路交通建设的公共环节当中,更加全面地提升公路质量,为实现公路的自动化建设提供新技术、新思路。
