大规模时序网络中早期突发内聚子图发现算法研究
2021-06-16戴捷李源范晓林孙晶
戴捷 李源 范晓林 孙晶
(北方工业大学信息学院 北京市 100144)
1 引言
在现实世界中,图模型被广泛用于表示实体之间的关系,比如社交网络,交通网络,作者协作网络等。给定一个图,集合中的顶点表示实体,边表示关系,更进一步,可以设置带权重的边用来体现实体关系的联系程度,比如交通网络中顶点可以表示为城市,边表示两城市之间的路线,边上的权重可以表示距离[1]。在信息时代,图的规模变得巨大,图模型所代表的数据中的价值也越来越重要。由于时序网络中的信息是实时变化的,所以更值得的挖掘其中的信息。对于所有图模型而言,内聚子图是图中最密集的区域,也就含有重要的信息,它们可以表示社交网络中的交际社区、商业合作网络中的合作联盟。因此,寻找图中的内聚子图是一个重要且有意义的问题[3]-[7]。在时序网络中,由于信息具有时间性,所以任何事件都有一个发生的过程。其中,有一类事件非常值得关注,它们的出现是突发的,就像是平静的水面突然爆出水花一样,这类事件可以称为突发事件。这种突发事件往往带有重要的信息。事件的属性可以是好也可以是坏,若是一件坏事,随着时间的发展,事件的扩大可能会给社会造成不良影响甚至是极大的损失。显然,越早发现突发事件,就能更好地进行处理,如果早期就注意到该事件的出现,然后加以控制,就能够避免损失,从另一方面说也给社会带来了益处。在图模型中,突发事件可以表示为突发内聚子图 (BCS),也就是多个节点以最快的比例积聚其内聚性,此时形成的子图就是一个带有突发性可以表示事件的BCS。但遗憾的是,目前对于时序网络的研究普遍忽视了信息的突发,可喜的是,最新的工作提出了突发这一新概念[1][2],同时Qin 等人[2]提出了突发内聚子图 (BCS) 模型并给出了搜索方法。然而,上述方法要求BCS 至少要持续一个给定的时间,这就忽略了时效性,避免了事件被提前发现。针对上述问题,我们首先通过整合拓扑信息和历史时空信息,将具有边缘权重的时空网络转化为节点加权的时空网络。然后,我们基于著名的k-core 提出了早期突发内聚子图(EBCS)模型,即具有早期突发性和内聚性的k-core。为了找到EBCS:
(1)我们提出了一种全局搜索算法,采用缩减策略,称为GS-EBCS。
(2)为了提高效率,我们进一步提出了一种具有扩展-精简思想的局部搜索算法,称为LS-EBCS。
另外,在我们提出的两种算法中:
1.我们使用用滑动窗口的方法来解决时间持续问题;
2.由于时空网络中不断出现突发信息,我们给出一个阈值φ 来过滤不重要的突发信息。
2 基本概念及相关定义
本节主要介绍一些基本概念及其符号表达,阐述了EBCS 的相关定义,并对要解决的主要问题给出具体定义。
2.1 基本概念
给定一组时间图序列:
(1)它和所给时间图序列有相同的节点集V。

最小度是常用的测量子图内聚性的方法。
由于边权重可以表示两节点之间的联系程度所以sumu可以反映节点u 及其邻居节点所构成的一个子图的权重。在一个网络中,这样的子图可以反映事件的联系程度。

表1:统计数据集

基本概念阐述明白后,下面给出EBCS 的定义。
2.2 问题定义
接下来的章节,我们具体的阐述EBCS 的两种发现算法。
3 EBCS发现算法
本节讲述EBCS 的两种发现算法。首先对时间图序列进行预处理:指定sg 值后,将[ti,tj]时间段的时间图依据sg 值转换为带有节点时间权重的聚合图序列接下来,给出算法的详细介绍。
3.1 GS-EBCS算法
本小节的GS-EBCS 算法,是基于全局搜索的策略。给定阈值φ 和正整数k,如果聚合图中最大的节点时间权重小于φ,说明聚合图中表示的突发信息不重要,所以不对聚合图处理。反之,将聚合图修剪成k-core,然后不断的从该k-core 中移除节点时间权重最小的节点,直到再移除一个节点时间权重最小节点后,k-core不存在,此时停止移除节点。由剩余节点诱导得到的子图就是EBCS。
算法1.GS-EBCS.

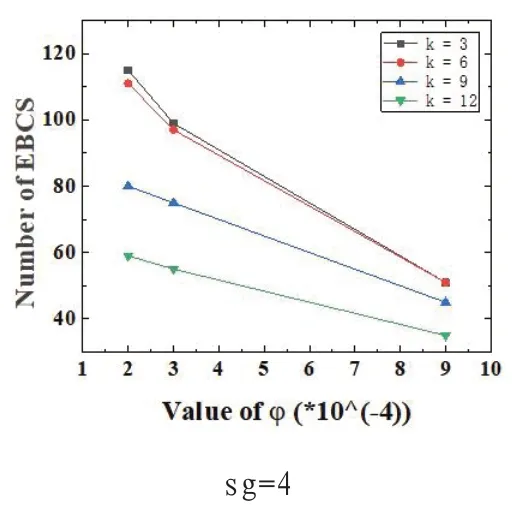
图1:不同参数下算法发现的EBCS 的数量

图2:sg=4 时,不同k 和φ 下算法运行时间
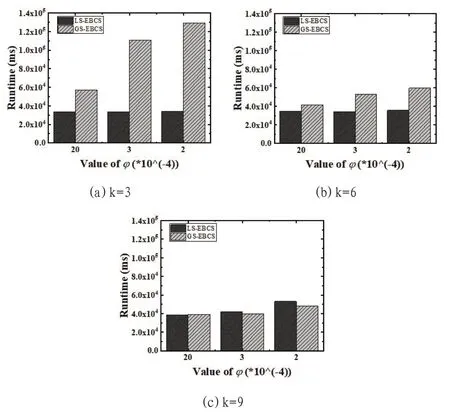
图3:sg=7 时,不同k 和φ 下算法运行时间
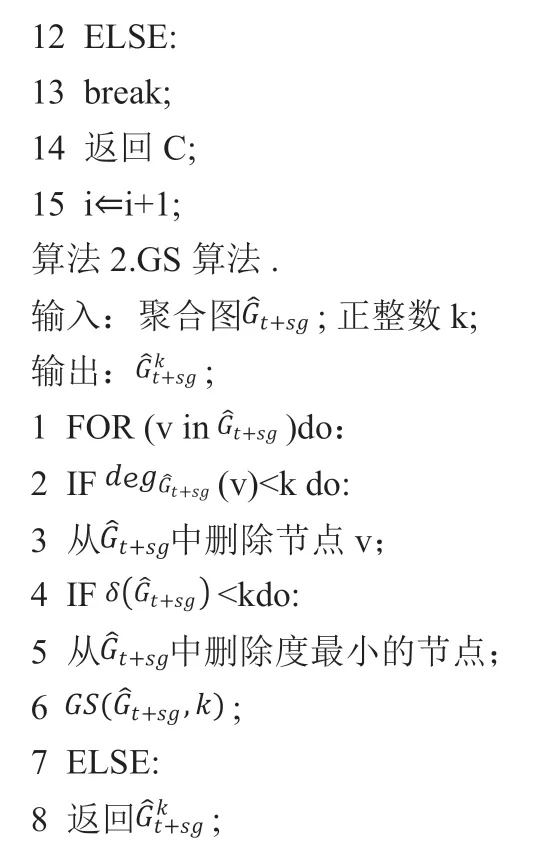
3.2 LS-EBCS算法
本节对上一小节的算法进行改进,提出了一种基于局部搜索策略的LS-EBCS 算法。该算法从节点时间权重最大的节点开始,按照节点时间权重从大到小的顺序不断选中节点,直到由选中节点诱导得到的子图包含k-core。后续操作与上述算法相同。
算法3.LS-EBCS.
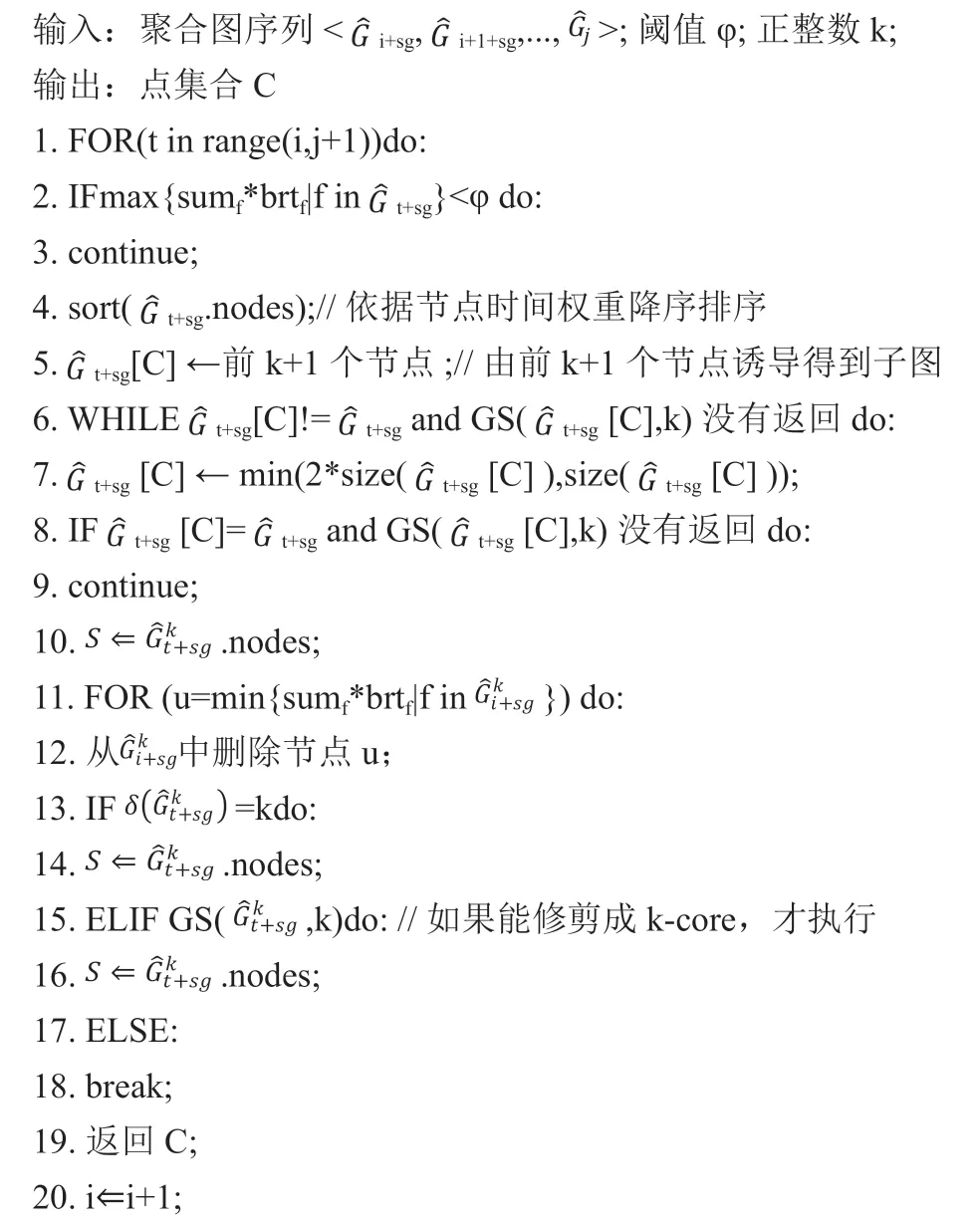
该算法采取了一种二倍扩展的方法(行7)。当t+sg[C]不包含k-core 时,就继续选中k+1 之后的节点,直到t+sg[C]的规模变为原规模的两倍,若达不到两倍,t+sg[C]就是t+sg。只采取二倍扩展的原因详见文献[8]。
4 实验结果与分析
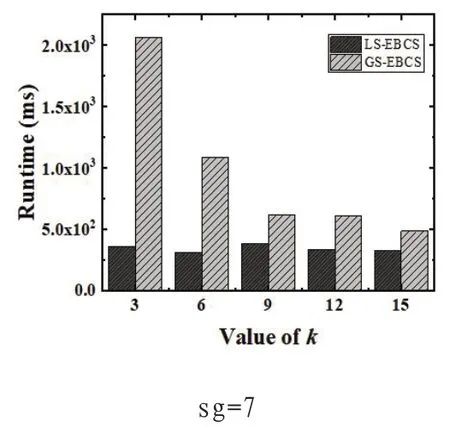
图4:算法在单个聚合图上运行时间的比较
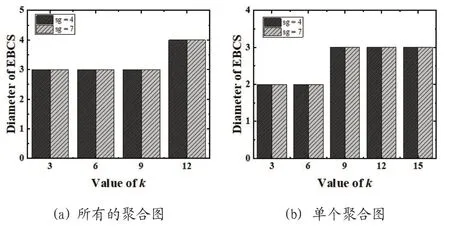
图5:不同k 值下的EBCS 直径
为了有效的评估提出的算法,本实验用真实的微博数据集进行评估,数据集的详细统计信息汇总在表1 中,其中|V|表示顶点个数、|E|表示时序边数、k_max 表示数据集最大核数、表示规模最大的单个聚合图中的最大核数、|T|表示时间图的数量,| |表示聚合图的数量。该数据集是时序语义网络,时间图中的每一条边表示词v 和词u 在一句话中同时出现,边的权重是出现的次数占所有边次数和的比值。本文收集了从2019年 12月 1日到 2020年 4月 3 里128 家媒体发布的信息。时间戳单位是日。
4.1 算法高效性分析
本节分析LS-EBCS 算法和GS-EBCS 算法在不同参数下的高效性。参数包括聚合阈值sg,阈值φ 以及表示核数的正整数k。
从图1 可以看出,通过调整φ 可以有效地对聚合图进行过滤。从图2 和图3 中可以看出,当k 值较小时,LS-EBCS 算法的运行效率远高于GS-EBCS 算法;当k 值较大时,GS-EBCS 算法的运行效率高于LS-EBCS 算法。这是因为,在140 个时间图中,有些时间图的规模很小,所以形成的聚合图的规模也很小。当k 的值较小时,只要0 到1 次增加子图大小,LS-EBCS 就可以找到包含k-core的子图。但是,当k 的值很大时,算法要多次增加子图大小。在最坏的情况下,子图就是聚合图。这时LS-EBCS 算法就变成了GSEBCS 算法,加上前期增加子图大小的时间后,LS-EBCS 算法的运行使间会比GS-EBCS 算法长。
为了在微博数据集上更明显地比较两种算法,我们将实验设置在一个最大27 核的单个聚合图上。在图4 中,可以清楚地看到,随着k 值和聚合图规模的增加,两种算法的运行时间的变化。明显看出LS-EBCS 算法优于GS-EBCS 算法。
4.2 算法有效性分析
本节使用图直径度量方法来测试我们提出的算法所发现的EBCS 子图的有效性。
图5.a 给出了在sg 值为7 和4 的条件下,改变k 值,在包含139 个聚合图的微博数据集中发现的EBCS 的平均直径,图5.b 给出了上述单个聚合图在sg 值为7 和4 的条件下,改变k 值时EBCS的直径。从实验结果可以清楚地看出LS-EBCS 算法和GS-EBCS 算法的有效性。总之,从总的实验结果可以看出,两种算法都有各自的优势,但总的来说,LS-EBCS 算法优于GS-EBCS 算法。
5 结束语
本文旨在发现在时序网络中用已有的BCS 图模型表示的突发事件。为了更早地发现突发事件,我们结合图模型的设计和实际环境的需求,提出了EBCS 模型。接下来,我们分别提出了基于全局搜索的GS-EBCS 算法和基于局部搜索的LS-EBCS 算法。最后,我们在四个大型真实数据集上进行了大量的实验,以证明我们提出的算法的效率和效果。
