基于无人机的物流自动投放系统设计研究
2021-06-11亢炜
亢炜
(陕西职业技术学院,陕西西安 710038)
处于21 世纪背景下,科学技术飞速发展,小型无人机也能够实现更加丰富的功能,无人机设备包括GPS、激光、雷达和声呐等,能够采用惯性导航系统、人为操纵多种方式,更好地帮助无人机执行特定任务,譬如监控目标、跟踪逃犯,精准估计无人直升机所在位置及速度信息。虽然在无人机技术发展中,不同国家研究学者都展开了对无人机问题的系统研究,但是研究侧重点仍然存在不同,包括集中于目标识别、跟踪策略、模拟理论等不同研究模块。而文中研究则将无人机技术应用于近年来迅猛发展的物流快递行业,即物流自动投放系统设计中。其中无人机所具备的“小微型”技术特点,也创造了更好的自动智能快递体验,可是总体无人机技术应用还尚未形成成熟体系,所以提出了基于无人机的物流自动投放系统设计思路。丰富我国该领域的理论研究,为类似研究提供参考作用的同时,也为无人机在我国物流快递行业领域更好地应用提供指导价值[1-5]。
1 系统设计总架构
文中研究是为了能够设计可以实现自动投放的无人机投放系统,经无人机、自主快递柜、调度中心多个单位之间共同完成。那么,在设计该自动投放系统时,作为该核心系统设计模块的无人机快递系统体系结构见图1。
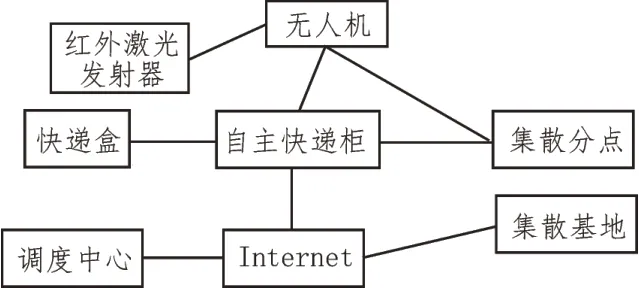
图1 无人机快递系统体系结构
2 系统硬件设计
物流投放系统主要包括了机械爪、投放坞(见图2),通过在无人机上固定投放坞,经机械爪连接凯夫拉线,便可以实现整个系统的工作流程。即在飞行无人机至指定投放点,然后经电机1 启动投放坞,实现对机械爪的投放控制,经对电机1 的具体转速进行控制,并对机械爪的具体下降速度进行有效控制,从而对机械爪的具体下降姿态做到实时监控。直至到达地面均可以采用机械爪成功释放包裹,最终将机械爪进行回收并置于投放坞内,这样就完成了一次投放流程[6-10]。
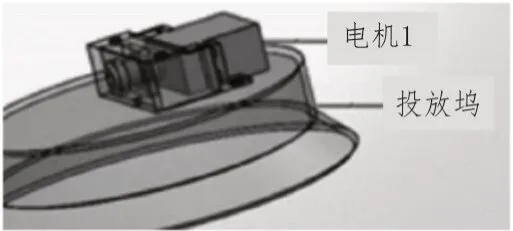
图2 无人机投放系统三维图
2.1 系统硬件
图3 为该机载无人机自动投放系统的总架构设计,包括了小型无人直升机、投放坞、机械爪三大硬件组成,主要包括了主控板、超声波、模板、无线模块、电机模块。

图3 机载无人机自动投放系统
2.2 主控芯片
在设计该系统时运用了主控芯片型号为STM 32F103C8T6 单片机,能够依照该单片机的技术优势,运用32 位ARM 微控制器,达到72 MHz 的工作频率,在实际应用中真正做到减小功耗,提高系统性能,且增加运行速度等多种技术优势。其中,该主控芯片出厂自带SPI、I2C 接口控制器,能够更好地与该系统的其他硬件模块之间进行有效通信。而且,该主控芯片还能够实现多路PWM 输出,能较好地控制芯片内部集成定时器的功能模块。
2.3 机载处理器及传感器
该机载处理器及传感器运用ODROID-U3 开发板,能够满足四核A9处理器以2 GB RAM,达到1.7 GHz的主频,可以应用于高负载运算的处理测试程序中,确保整体性能良好运行,并满足系统的负载量需求。ODROID-U3 在该系统平台运用中,由于具备了质量轻、体积小的技术优势,还能够与多个外设接口相连接,其中拥有3 个USB 2.0 接口、一个RJ-45 网口和调试串口。并选用小巧轻便、方便机载安装的USB 相机,采用了MPI6050 型号的6 轴运动处理传感器,能够支持UVC 免驱协议,在Linux 开发环境下成功开发驱动程序,并且具备了各3 轴的陀螺仪、加速度,同时该传感器还拥有I2C 第二个接口,能够在实际应用中运用自带DMP 连接嵌入式运动处理驱动库,来转换处理加速度、陀螺仪两个传感器采集所获的数据,最终得出四元数。该传感器在实际应用过程中,加速度、角速度这两大测量范围分别如下:
加速度:±2 g、±4 g、±8 g、±16 g;角速度:±250 rad/s、±500 rad/s、±1 000 rad/s、以及20 000 rad/s(dsp),可以经编程代码控制以上两个测量范围,示例如下:
2.4 超声波传感器
文中自动投放系统设计中运用的超声波传感器型号为KS103H,该传感器能够做到对发出的超声波型号进行特有调制,然后进行成功发射,能够拥有较强抗干扰效果。并且该传感器还自带温度补偿,能够完成8 m 的距离测量,达到偏差在1 mm 以内的测量高精度,并且在测量过程中可以有效控制功耗,为了实现该传感器和主控芯片之间的良好通信,同样在内部设计集成I2C 接口控制器。
2.5 电机模块及无人机参数
为了在设计自动投放系统中,满足投放坞的低质量、大扭矩电机技术需求,最终选择使用能够做到全方位无死角的连续旋转舵机,设计供电电压为6 V,扭矩为7.5 kg/cm,能够做到1.5 kg 以内的包裹稳定投放。采用小型飞行器,作为被控无人机,拥有成熟、简化的模型优势,对于指定任务目标完成容易度更大,所以被广泛运用于航拍、监测等无人机中。该系统设计选用四旋翼经纬M100 型号飞行器,拥有轻盈机身、较大有效载荷、结构简洁、动力系统可以达到较久的续航时间,能够方便后期的试飞、调试及执行任务。经串口连接上层处理器和飞控,并开发SDK 完成相关参数传递。将锥形导向运用于投放坞在投放中的固定导向,多连杆四指运用于机械爪中,并运用了TB6612FNG 驱动芯片,能够在运用过程中达到较高的运行效率和较大的电流量,并且设计两个I/O 接口,一路PWM。这样可以实现投放系统机械结构的牢固需求。
3 系统软件设计
文中基于无人机的物流自动投放系统软件,设计采用了嵌入式ARM 开发板,并在PC 终端成功安装了嵌入式Linux 操作系统及ROS 开发环境。系统开发板同接地面站局域网,形成了ROS 网络,在绑定两个主机网卡IP 账号时,通过ROS 网络可以满足主机之间的共享信息发布,从而实现主机之间信息访问的便捷可靠,无需对通信层加以关注,作为该系统设计开发的ROS 网络技术优势。针对部分需要通信的相关技术指令,经某程序具体发布的相关信息话题,能够完成传统层面广播。所以可以划分该程序为多个小模块程序,便于后期的调试管理[10-16]。
为了能够成功可靠的对自动投放系统机械爪、投放坞进行控制,并获得在不同姿态下的准确数据。将PID 算法引入该系统设计数据处理中,运用PID 控制器主要包括了比例、积分、微分以上三大单元,结合该投放系统的实际PID 运算应用,选用积分分离式PID 算法如式(1)所示。

运用该算法能够对电机正反转、速度进行有效控制,设计的投放坞程序、机械爪程序两大控制流程图如图4、图5 所示。
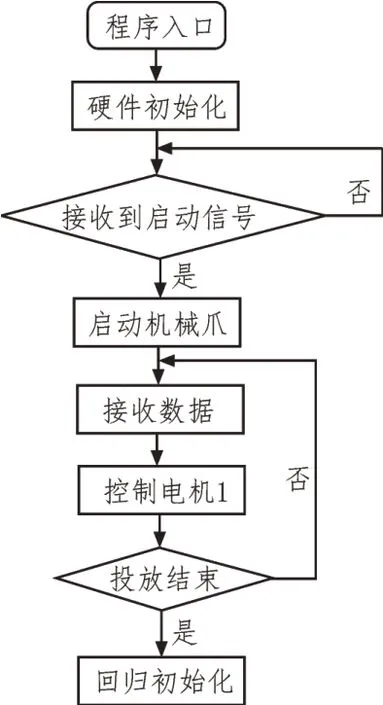
图4 投放坞程序流程
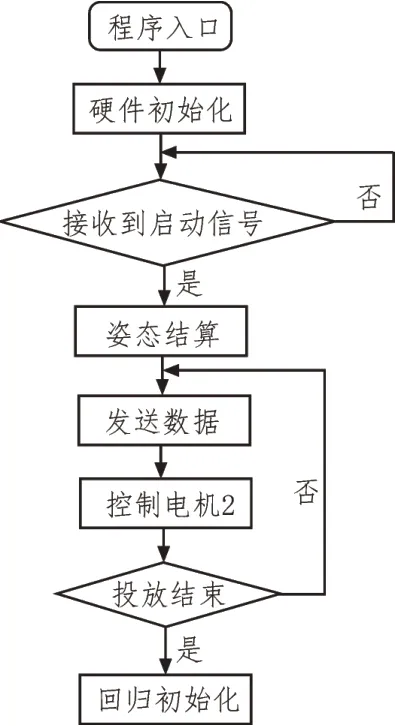
图5 机械爪程序流程
4 实验测试
通过将文中设计的基于无人机的自动投放系统应用于实际物流自动投放中,设计的Linux 开发系统终端给出飞行器控制指令,经监控飞机端具体发布的实时位置、姿态相关数据,经UAV2car 成功获取观测数据情况。经该系统ROS 平台架构的自带rqt 工具包,可以实时观测并绘制变化曲线,来更加直观地观察监控数据的变动情况。
通过主控芯片经传感器、超声波传感器等获得不同姿态下的控制数据,运用以上PID 算法公式,实现对PID 控制参数的反复调试,经多次飞行投放实验发现可以获得2.5 m 高度下的快递自动投放。并且设计的该无人机自动投放系统,能够成功控制无人机机械爪具体升降速度和定点高度,可以准确稳定地展开投放工作,从而获得预期系统设计目标,证实了该系统设计思路的可行性。
5 结束语
总之,通过文中设计的基于无人机的物流自动投放系统设计思路,能够拥有较高稳定性且自重较低的投放技术优势,能够在人机适配应用中,有效控制物流投放的原本时间,并且可以减少不必要的人力成本投入,不仅如此,在未来还能够将该自动投放系统应用于勘探、急救、救灾、高危采样等多行业领域中,因此应用前景十分广阔。
