基于改进强跟踪无迹卡尔曼滤波的电力信号同步相量跟踪算法
2021-06-10牛胜锁王春鑫梁志瑞陈泽雄
牛胜锁 王春鑫 梁志瑞 饶 毅 陈泽雄
基于改进强跟踪无迹卡尔曼滤波的电力信号同步相量跟踪算法
牛胜锁1王春鑫1梁志瑞1饶 毅2陈泽雄2
(1. 华北电力大学电气与电子工程学院 保定 071003 2. 广东电网有限责任公司广州供电局 广州 510620)
配电网中各类噪声对相量测量产生较大影响,研究在高噪声环境下能够可靠检测并能快速跟踪电力信号突变的同步相量测量算法,对保证电网的稳定性与可靠性具有重要意义。提出基于量测量误差协方差次优估计的自适应强跟踪无迹卡尔曼滤波(SEMEC-ASTUKF)的同步相量测量算法。首先根据递归最小二乘法提出一种自适应常值噪声统计估计器提高量测噪声协方差估计精度;然后根据电力信号突变后特征,构建突变检测算法和渐消因子次优估计算法,改善强跟踪无迹卡尔曼滤波(STUKF)算法在高噪声环境下对突变检测能力弱和跟踪突变慢的缺陷。利用实测信号对算法性能进行验证,结果表明,SEMEC-ASTUKF算法具有更高的测量精度,对突变具有更好的检测灵敏度和更高的跟踪速度。
高噪声 强跟踪无迹卡尔曼滤波 常值噪声统计估计器 渐消因子
0 引言
同步相量测量单元(Phasor Measurement Unit, PMU)作为实现广域测量系统(Wide Area Measurement System, WAMS)的基础和核心[1-2],其测量算法至关重要。受非线性负荷及设备[3]、部分负荷[4]、采样过程[5-6]及大量分布式电源和电动汽车[7]投入的影响,配电网电力信号中存在大量的谐波、间谐波及随机噪声,同时大负荷投切等因素往往导致配电网部分节点相量发生突变[8]。配电网信号的高噪声及强瞬变的特性对同步相量测量算法产生了很大影响,研究能够在高噪声条件下具有高测量精度并能快速跟踪突变的同步相量测量算法对保证电力系统的可靠性与稳定性具有重要意义。
目前国内外的同步相量测量算法大致可分为频域类算法和估计类算法两类。频域类算法是指以离散傅里叶变换算法及其改进算法为基础的同步相量测量算法[9-11],这类算法可有效屏蔽谐波对相量测量的影响,但对含有较多间谐波及噪声的信号作用有限,为了保证测量精度需增大时间窗长,无法同时兼顾测量精度和实时性。为此,国内外部分学者提出了估计类算法,这类算法有非线性回归法[12]、粒子滤波法[13]及卡尔曼滤波法[14-16]等,卡尔曼滤波算法因其高实时性和高测量精度被广泛关注。近年来,基于强跟踪卡尔曼[17]、无迹卡尔曼滤波[18-19]算法的同步相量测量算法被相继提出。为进一步提高无迹卡尔曼滤波算法跟踪突变的能力,文献[20]提出了一种自适应采样强跟踪比例无迹卡尔曼滤波(Adaptive Sampling Strong Tracking Scaled Unscented Kalman Filter, ASST-SUKF)算法,该方法提出了一种集中引入渐消因子的方法,增强算法实时性的同时提高了算法对突变的跟踪速度。强跟踪无迹卡尔曼滤波(Strong Tracking Unscented Kalman Filter, STUKF)算法[21]采用嵌入弱化因子的方法对残差序列协方差的估计误差进行屏蔽,但同时也弱化了算法检测和跟踪突变的能力。为增强算法检测和跟踪突变的能力,需要一种新的方法估计渐消因子。
针对上述问题,本文提出一种量测量误差协方差次优估计的自适应强跟踪无迹卡尔曼滤波(Adaptive Strong Tracking Unscented Kalman Filter based on Suboptimal Estimate of Measurement Error Covariance, SEMEC-ASTUKF)算法。首先提出一种自适应常值噪声统计估计器,精确估计量测噪声协方差,在此基础上提出了一种系统状态判定算法及渐消因子次优估计算法对渐消因子进行估计,在保证算法的测量精度前提下,提高算法跟踪突变的能力。最后利用实测数据验证了所提算法的有效性。
1 基于STUKF的同步相量测量算法
1.1 STUKF算法原理
考虑非线性高斯系统


计算未引入渐消因子时的状态预测协方差阵、自协方差阵和互协方差阵为








1.2 电力系统基波相量状态空间模型
电力信号在时刻采样值可表示为

采样时刻较长时,谐波、间谐波与基波相关性很弱,故可将其纳入噪声中滤除,于是本文只将基波相量参数纳入状态变量,定义电力信号的状态变量为

易知,系统的状态转移方程为

系统的观测方程为

由式(14)可知,迭代次时的基波参量可按式(17)~式(19)计算,则有
幅值为
频率为

初相角为

2 SEMEC-ASTUKF算法

为估计量测噪声协方差阵和方便说明,定义如下变量。
量测量误差协方差为

第个采样点时量测量均方差为
辅助说明变量为

2.1 自适应常值噪声统计估计器

对比式(21)和式(22),易知

又
得到

改变修正方程式(23)为

根据递推最小二乘法原理,量测噪声协方差阵增益矩阵及状态变量误差协方差矩阵更新式为

式中,为单位矩阵。
2.2 基于SEMEC-ASTUKF的同步相量测量算法
2.2.1 基于量测量误差协方差的渐消因子次优估计


其中

任意时刻的残差序列均满足关系为

其中

其中


其中

式中,为检测到突变的时刻;为检测到突变时间窗长0内的残差与其转置乘积的序列。
得到突变后任意时刻的量测量误差协方差的次优估计值为
根据式(38)及式(6)~式(8)可得到渐消因子为



其中

2.2.2 系统状态判定算法
为便于说明,本文将算法收敛后状态变量未发生变化时的状态称为稳定状态,将状态变量突变后算法收敛前的状态称为突变状态。
当算法收敛后,量测量真实值与估计值之间差值很小可忽略,根据式(32)可知,收敛后在稳定状态时为

为判定系统状态构建判定变量为
式中,为时间窗长度。
由式(43)可知,收敛后稳定状态时为



其中

式中,为状态变量突变时刻。
2.2.3 基于SEMEC-ASTUKF的同步相量测量算法流程
基于以上理论,本文构建基于SEMEC-ASTUKF的同步相量测量算法如下:
(1)设定状态变量初始值、状态变量初始误差协方差矩阵及量测噪声协方差阵,选取时间窗长及适当的卡方分布上分位点,设置系统判定状态为稳定状态。
(2)按式(3)计算权值。
(3)按式(2)选取Sigma点,按式(4)、式(5)进行未引入渐消因子时的状态预测和量测更新。
(4)按式(21)计算量测量均方差,按式(28)计算增益矩阵后,按式(27)和式(29)更新量测噪声协方差的估计值及其误差协方差阵。

(8)完成滤波更新后,按式(17)~式(19)计算相量参数,随着不断获得新的采样点,重复式(3)~式(8)。
算法流程如图1所示。
3 算例分析
使用河北省电力科学研究院的福禄克三相电能功率标准源6130A产生突变的实验信号,并利用横河高精度示波器DL850E采样获取实际的信号数据,实验设备如图2所示。

图1 SEMEC-ASTUKF同步相量测量算法流程

图2 三相电能功率标准源实物图
采用戴尔便携式计算机(windows10系统、CPU型号为i5-8550U)作为实验平台,对算法性能进行验证。实测采样得到三组信号,信号通式为
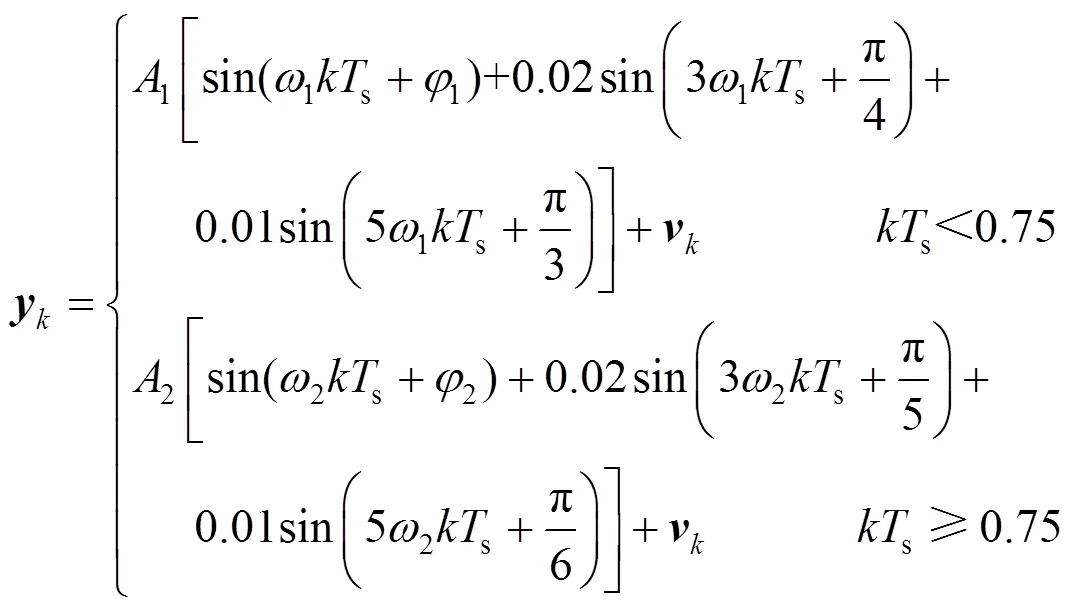
为表现算法在不同突变条件下的性能,本文设置了三组突变实验,实验相量参数见表1。
表1 各组突变实验相量参数

Tab.1 Phasor parameters of mutation experiment
为体现算法性能,本文选取了文献[9]的基于扩展卡尔曼滤波的AMDFT算法和文献[20]的ASST-SUKF算法参与对比,算法参数设置如下:AMDFT算法选取时间窗长为192个采样点;SEMEC-ASTUKF算法选取时间窗长度为960个采样点,上分位点选为1 200,时间窗长0设置为192个采样点;ASST-SUKF算法弱化因子设置为20。
3.1 自适应噪声统计估计器性能测试
为描述量测噪声误差协方差估计精度,定义噪声估计相对误差为

为验证本文所提自适应噪声统计估计器性能,选取文献[21]所提常值噪声统计估计器参与对比,得到各采样时刻噪声估计相对误差如图3所示。
由图3可看出标准常值噪声统计估计器在初始阶段估计出负值,实际中常造成算法发散。本文所提自适应常值噪声统计估计器稳定收敛且快于标准常值噪声统计估计器,收敛后其相对误差稳定在5%以内,估计精度高于标准常值噪声统计估计器。
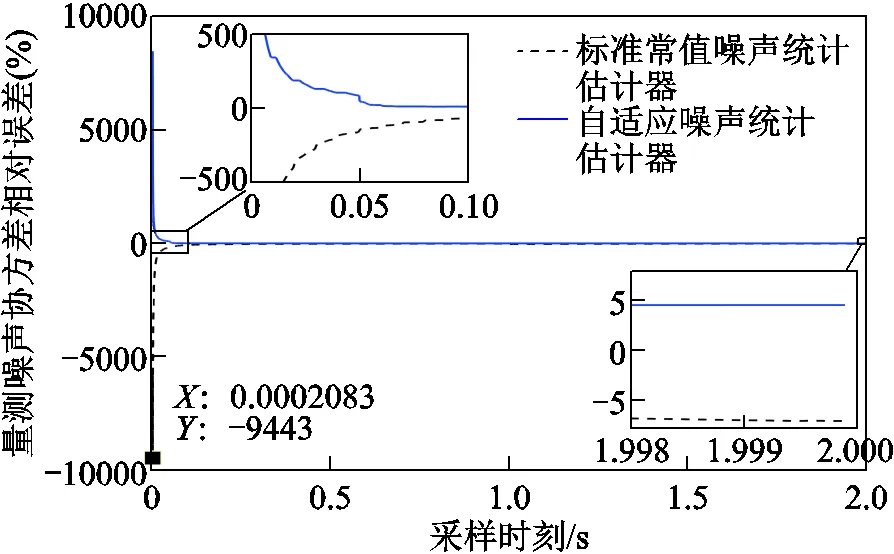
图3 量测噪声协方差估计相对误差对比图
3.2 算法实时性测试
本小节对比三种算法的实时性,测量表1实验3信号,得到收敛后算法计算用时对比见表2。
表2 算法计算用时对比

Tab.2 Comparison of the time algorithm use to calculates
由表2可知,AMDFT所需计算时间最长,约为其他两种算法的两倍。由于添加了均方差计算,SEMEC-ASTUKF算法比ASST-SUKF算法计算时间长,但未突变时计算时间增幅不大,约增长了13.3%,且实时性明显优于AMDFT算法。
3.3 突变检测测试
实验记录ASST-SUKF和SEMEC-ASTUKF算法检测各实验突变结果对比见表3。
表3 突变检测性能对比

Tab.3 Comparison of mutation detection performance
由表3可知,由于ASST-SUKF算法的弱化因子掩盖了一定的突变信息,该算法在实验1未检测到突变,且实验2和3检测突变所需时间较长。改进后的SEMEC-ASTUKF能够较准确地估计量测量误差协方差,三组实验均能可靠地检测到突变,且取值更接近其理想值,由于保留了较多的突变信息,其检测到突变所需时间更短。
3.4 测量精度对比
同步相量测量算法测量精度要求[22]见表4。
表4 基波相量准确度要求

Tab.4 Fundamental phasor accuracy’s requirements
为评价算法的测量精度,设置如下评价标准。
第种相量参数的均方根误差(RMSE)为

第个采样点第种相量参数的绝对误差为
第种相量参数的最大绝对误差为

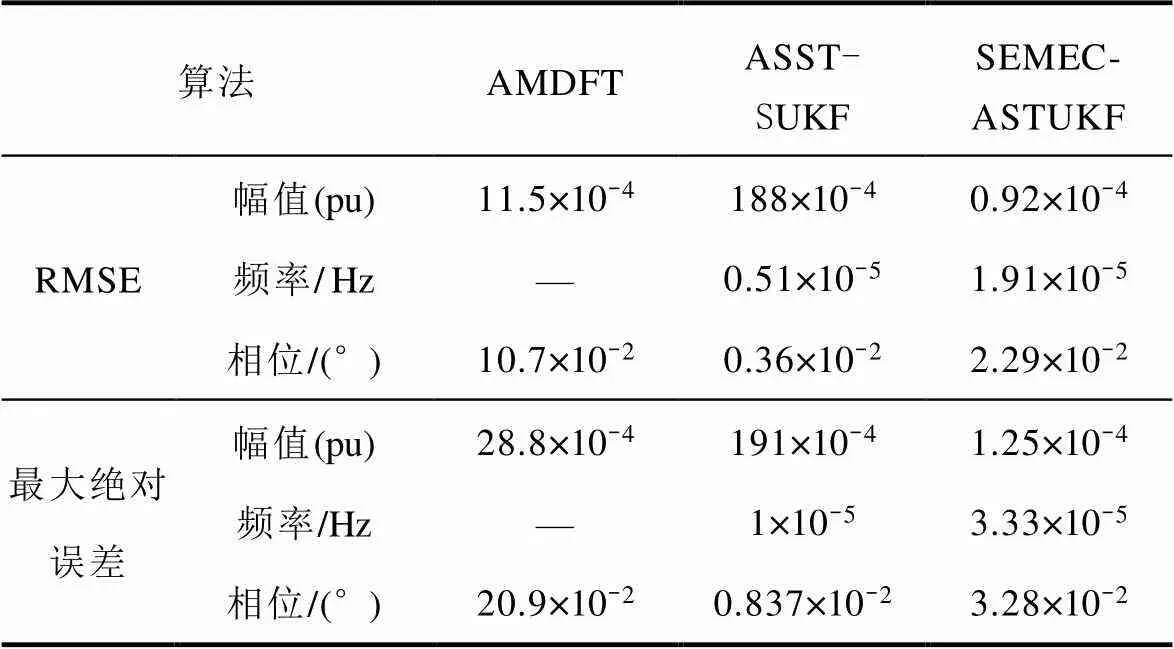
利用表1三组实验对各算法测试,得到信号3.9~4s的相量测量精度对比结果见表5~表7。
表5 实验1估计精度对比
Tab.5 Comparison of estimation accuracy in experiment 1
表6 实验2估计精度对比

Tab.6 Comparison of estimation accuracy in experiment 2
表7 实验3估计精度对比
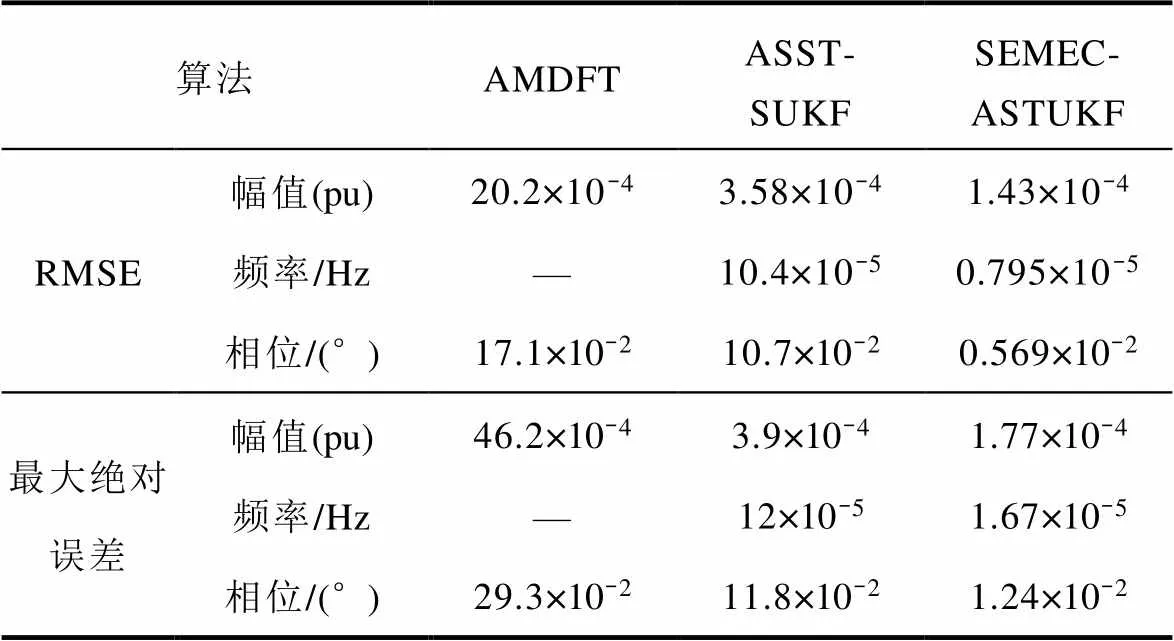
Tab.7 Comparison of estimation accuracy in experiment 3
由表5~表7可知,实验1中,由于ASST-SUKF算法未检测到突变,幅值长时间测量不准,无法满足精度要求。实验1~实验3中,由于SEMEC-ASTUKF算法均可靠地检测到了突变,且渐消因子取值接近理想值,收敛后其测量误差很小且高于AMDFT算法和ASST-SUKF算法。
实验3中相量参数估计绝对误差如图4~图6。由图4~图6可知,由于SEMEC-ASTUKF算法返回了较为理想的渐消因子,虽然等待了一周波未对突变进行跟踪,但跟踪突变速度仍高于AMDFT算法和ASST-SUKF算法,能够以更快的速度达到规范的精度要求。SEMEC-ASTUKF算法收敛后测量精度高于AMDFT算法和ASST-SUKF算法,AMDFT算法存在受噪声影响部分点的测量误差不能满足规范要求的问题。
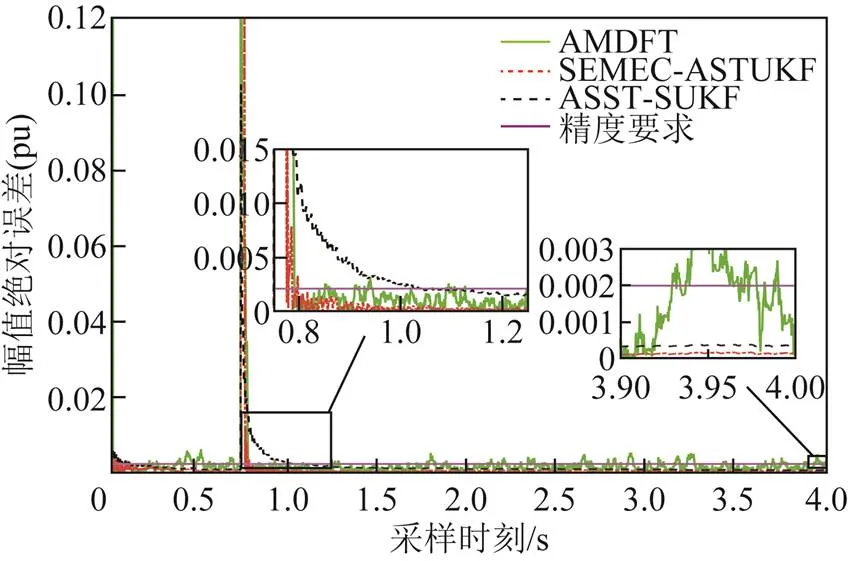
图4 实验3各算法幅值绝对误差

图5 实验3各算法频率绝对误差
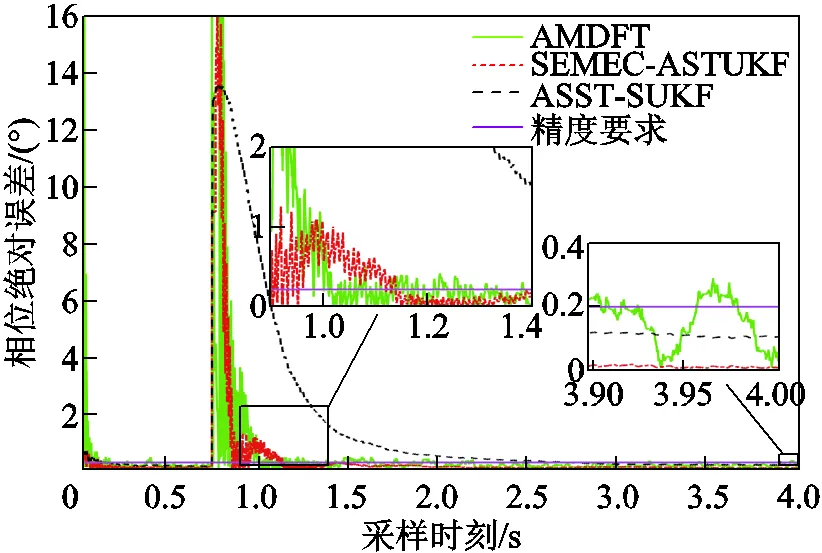
图6 实验3各算法相位绝对误差
4 结论
本文针对STUKF算法在高噪声环境下检测突变能力弱、跟踪突变较慢的缺陷,提出了基于SEMEC-ASTUKF的同步相量测量算法。
1)基于递归最小二乘法理论构建了自适应噪声统计估计器,该估计器具有更稳定的估计性能和更快的收敛速度,且收敛后具有更高的估计精度。
2)基于卡方分布理论提出了一种突变判定方法,并根据电力信号突变后特征构建了新的渐消因子次优估计算法。该方法在高噪声环境下对突变具有更高的检测灵敏度,对渐消因子的估计精度更高。
3)对含有谐波和随机噪声的多种突变实测信号进行相量估计。实验结果表明,SEMEC-ASTUKF对高含量的谐波和随机噪声具有较优的屏蔽效果,测量精度更高;对各种突变状况均能可靠跟踪,且具有更高的跟踪速度。
[1]刘友波, 刘俊勇, Gareth Taylor, 等. 面向同步相量轨迹簇规则的电力系统暂态稳定实时评估[J]. 中国电机工程学报, 2011, 31(16): 32-39. Liu Youbo, Liu Junyong, Taylor G, et al. Rule-based combined algorithm for power system real-time transient stability assessment using synchronized phasor trajectory clusters[J]. Proceedings of the CSEE, 2011, 31(16): 32-39.
[2]鞠平, 郑世宇, 徐群, 等. 广域测量系统研究综述[J]. 电力自动化设备, 2004(7): 37-40, 49. Ju Ping, Zheng Shiyu, Xu Qun, et al. Survey of wide area measurement system[J]. Electric Power Automation Equipment, 2004(7): 37-40, 49.
[3]李俊堂. 有源电力滤波器谐波电流预测与控制方法研究[D]. 长沙: 长沙理工大学, 2009.
[4]刘海涛, 张保会, 谭伦农. 低压电网信道容量的研究[J].电力系统自动化, 2004, 28(4): 40-44. Liu Haitao, Zhang Baohui, Tan Lunnong. Reasearch on the channel capacity in a low voltage network channel[J]. Automation of Electric Power Systems, 2004, 28(4): 40-44.
[5]胡蓓, 肖浩, 李建光, 等. 光纤电流互感器的噪声分析与信噪比优化设计[J]. 高电压技术, 2017, 43(2): 654-660. Hu Bei, Xiao Hao, Li Jianguang, et al. Noise analysis and SNR optimization design of fiber optical current transformers[J]. High Voltage Engineering, 2017, 43(2): 654-660.
[6]Cárdenas-Olaya A C, Rubiola E, Friedt J M, et al. Noise characterization of analog to digital converters for amplitude and phase noise measurements.[J]. The Review of Scientific Instruments, 2017, 88(6): 287-291
[7]原凯, 宋毅, 李敬如, 等. 分布式电源与电动汽车接入的谐波特征研究[J]. 中国电机工程学报, 2018, 38(增刊1): 53-57. Yuan Kai, Song Yi, Li Jingru, et al. Harmonic characteris-tics of distributed generation and electric vehicle supplying access to the grid[J]. Proceedings of the CSEE, 2018, 38(S1): 53-57.
[8]王晶, 陈学允. UPFC对动态电能质量影响的分析研究[J].电工技术学报, 2004, 19(1):44-48. Wang Jing, Chen Xueyun. Study of the impacts of UPFC on dynamic power quality[J]. Transactions of China Electrotechnical Society, 2004, 19(1): 44-48.
[9]王科, 陈丽华, 麦瑞坤, 等. 基于扩展卡尔曼滤波频率跟踪的DFT同步相量测量算法[J]. 电网技术, 2014, 38(9): 2519-2524. Wang Ke, Chen Lihua, Mai Ruikun, et al. An improved discrete Fourier transformation based synchronous phasor measurement algorithm using frequency tracking founded on extended Kalman filter[J]. Power System Technology, 2014, 38(9): 2519-2524.
[10]邝昊云, 温和. 基于泰勒-傅里叶变换的电压闪变测量方法[J]. 电工技术学报, 2020, 35(22): 4798-4806. Kuang Haoyun, Wen He. Voltage flicker measurement based on Taylor-Fourier transform[J]. Journal of Electrical Technology, 2020, 35(22): 4798-4806.
[11]肖勇, 赵伟, 黄松岭. 基于离散傅里叶级数的非同步采样下谐波功率测量算法[J]. 电工技术学报, 2018, 33(7): 1570-1578. Xiao Yong, Zhao Wei, Huang Songling. Harmonic power measurement algorithm based on discrete fourier series in asynchronous sampling[J]. Transactions of China Electrotechnical Society, 2018, 33(7): 1570-1578.
[12]王璐. 适用于PMU校准器的相量测量方法研究及应用[D]. 北京: 华北电力大学(北京), 2017.
[13]孙国强, 王晗雯, 卫志农, 等.基于无迹粒子滤波算法的发电机动态状态估计[J].电力系统自动化, 2017, 41(14): 133-139. Sun Guoqiang, Wang Hanwen, Wei Zhinong, et al. Dynamic state estimation for generators based on unscented particle filtering algorithm[J]. Automation of Electric Power Systems, 2017, 41(14): 133-139.
[14]Wu Pengfei, Shi Zhangsong, Yan Penghao. Improved EKF-SLAM algorithm of unmanned helicopter autonomous landing on ship[C]//2018 37th Chinese Control Conference, Wuhan, 2018: 5287-5292.
[15]Kung Y S, Risfendra. Model Sim/Simulink co-simulation of a sensorless control for PMSM drives based on I-F startup and EKF[C]//2016 International Conference on Applied System Innovation, Okinawa, 2016: 1-4.
[16]李扬, 李京, 陈亮, 等. 复杂噪声条件下基于抗差容积卡尔曼滤波的发电机动态状态估计[J]. 电工技术学报, 2019, 34(17): 3651-3660. Li Yang, Li Jing, Chen Liang, et al. Dynamic state estimation of synchronous machines based on robust cubature Kalman filter under complex measurement noise conditions[J]. Transactions of China Electrote-chnical Society, 2019, 34(17): 3651-3660.
[17]刘洁波, 黄纯, 江亚群, 等. 基于强跟踪泰勒-卡尔曼滤波器的动态相量估计算法[J]. 电工技术学报, 2018, 33(2): 433-441. Liu Jiebo, Huang Chun, Jiang Yaqun, et al. Dynamic phasor estimator based on strong tracking Taylor-Kalman filter[J]. Transactions of China Electrotechnical Society, 2018, 33(2): 433-441.
[18]龙嘉川, 王先培, 赵宇, 等. 自适应无迹卡尔曼平滑算法及其在电力系统中的应用[J]. 中国电机工程学报, 2015, 35(23): 6048-6056. Long Jiachuan, Wang Xianpei, Zhao Yu, et al. Adaptive unscented Kalman smoothing algorithm and its application in power system[J]. Proceedings of the CSEE, 2015, 35(23): 6048-6056.
[19]赵洪山, 田甜. 基于自适应无迹卡尔曼滤波的电力系统动态状态估计[J]. 电网技术, 2014, 38(1): 188-192. Zhao Hongshan, Tian Tian. Dynamic state estimation for power system based on an adaptive unscented Kalman filter[J]. Power System Technology, 2014, 38(1): 188-192.
[20]牛胜锁, 王康乐, 梁志瑞. 基于改进强跟踪无迹卡尔曼滤波的电力系统同步相量估计方法[J]. 电网技术, 2019, 43(9): 3218-3225.Niu Shengsuo, Wang Kangle, Liang Zhirui. Synchronous phasor estimation method for power system based on modified strong tracking unscented Kalman filter[J]. Power System Technology, 2019, 43(9): 3218-3225.
[21]赵琳. 非线性系统滤波理论[M]. 北京: 国防工业出版社, 2012.
[22]国家调度电力通信中心. Q/GDW 1131—2014电力系统实时动态监测系统技术规范[S]. 北京: 国家电网公司, 2015.
An Algorithm for Tracking Synchronous Phasor of Power Signals Based on Improved Strong Tracking Unscented Kalman Filter
Niu Shengsuo1Wang Chunxin1Liang Zhirui1Rao Yi2Chen Zexiong2
(1. College of Electrical and Electronic Engineering North China Electric Power University Baoding 071003 China 2. Guangzhou Power Supply Bureau of Guangdong Power Grid Co. Guangzhou 510620 China)
All kinds of noises in the distribution network have a great impact on phasor measurement, so it is of great significance to study the synchronous phasor measurement algorithm which can reliably detect and quickly track the sudden change of power signal in the high noise environment to ensure the stability and reliability of the power network. An algorithm, adaptive strong tracking unscented Kalman filter based on suboptimal estimate of measurement error covariance (SEMEC-ASTUKF),for synchronous phasor measurement was proposed. An adaptive constant noise statistical estimator was proposed to improve the estimation accuracy of measured noise covariance.Based on the characteristics of power signal after mutation, the mutation detection algorithm and the fading factor sub-optimal estimation algorithm were constructed to improve the strong tracking unscented filter (STUKF) algorithm's weak of mutation detection ability and slow mutation tracking under high noise environment. The results show that the SEMEC-ASTUKF algorithm has higher measurement accuracy, better detection sensitivity and tracking speed for mutation.
Strongnoise, strong tracking unscented Kalman filter, adaptive constant noise statistical estimator, fading factor
TM712
10.19595/j.cnki.1000-6753.tces.L90028
国家重点研发计划资助项目(2017YFB0902901)。
2020-05-19
2020-09-20
牛胜锁 男,1980年生,博士,讲师,研究方向为广域测量技术与电能质量检测分析。E-mail:niushengsuo@163.com
王春鑫 男,1994年生,硕士研究生,研究方向为配电网电力信号参数估计。E-mail:m13731216508@163.com(通信作者)
(编辑 郭丽军)
