基于布谷鸟搜索的伺服云台控制器设计
2021-06-10仇笑天
仇笑天
(南京理工大学, 江苏 南京 210012)
0 引 言
伺服云台是搭载工作设备的机械载体,用以隔绝外界干扰(机械震动、风阻力矩等)对工作设备的影响。因此,伺服云台要求在干扰力矩的影响下能快速响应并保持平稳运行。目前对伺服云台的稳定控制已有较完善的研究,常见的控制方法有PID控制、模糊控制和神经网络控制等控制方法[1-3]。PID控制因其具有适应性强和易于实施的特点而被广泛应用,是目前最为广泛采用的控制方法。但PID控制器对于伺服云台这类具有高度复杂性、非线性和强干扰的系统难以取得较高的控制精度[4]。为克服PID控制的固有缺点,文献[5]提出了将PID控制与模糊控制相结合,构成模糊自整定PID控制器。但对于PID参数和模糊增益的设定主要依靠试验归纳和经验推导。文献[6]提出一种新型的元启发算法称为布谷鸟搜索算法(cuckoo search,CS),其对于参数的全局优化上具有不易于陷入局部最优、搜索速度快和搜索精度高的特点。本文结合模糊 PID控制器和布谷鸟搜索算法的特点,设计了一种基于布谷鸟搜索算法的模糊自整定PID控制器,进一步优化伺服云台的控制性能。
1 基于布谷鸟搜索的伺服云台控制器设计
伺服云台的关键指标在于其运行的精度和平稳性。即要求其对于负载扰动进行快速反应的同时,具有良好的稳态特性。因此本文所设计的模糊自整定PID控制器以伺服电机转子位置为控制对象,构建位置环控制器。伺服云台应能够稳定地保持在期望转角位置,并实时跟踪动态变化的转角位置。首先在云台不受干扰的理想负载环境下整定PID控制器,当达到PID控制器预期的控制效果后,通过布谷鸟搜索算法进行参数优化,并叠加模糊控制器构建模糊PID控制器以提高伺服云台的控制精度和动态响应特性。
1.1 PID控制器设计
以常见的二自由度伺服云台为例,其工作原理是空间上相互垂直的两个转动轴(俯仰轴和横滚轴)独立转动,使其搭载的工作设备可以在空间中自由转动。因此可以将伺服云台的俯仰轴和横滚轴单独建模控制。对伺服云台起到较大干扰作用的风阻力矩对云台横滚轴的影响最大,因此对云台横滚轴控制模型进行研究。
伺服云台横滚轴的双环控制原理图如图1 所示。图1中:伺服电机采用直流无刷电机模型;位置环控制采用PID控制器,以伺服云台为被控对象,经过PID控制器调节电机输出电压进而控制电机转速。伺服云台的位置信息经光电编码器采集并反馈到PID控制器输入端构建闭环控制。

图1 伺服云台横滚轴的双环控制原理图
PID控制器原理框图如图2所示。控制器输入由式(1)计算得到。

图2 PID控制器原理框图
e(t)=r(t)-y(t)
(1)
式中:y(t)为伺服电机转子瞬时转角;r(t)为期望转角;e(t)为转角偏差。
PID控制器采用绝对式控制器,控制规律可写成如下形式:
(2)

(3)
式中:KI为积分常数;KD为微分常数。
1.2 模糊自整定PID控制器设计
伺服云台工作时难以避免受到风阻干扰,故在电机的负载端加上一个时变的力矩信号,以模拟风阻干扰的作用。传统PID控制器的KP、KI和KD参数是固定的,在面对风阻力矩的干扰时难以取得良好的控制效果,故采用模糊控制器实时整定PID控制器参数。
模糊控制器不依赖于对象的精确模型,其控制方式是对于人类思考和决策方式的模拟。工作原理是将实际的输入量经过模糊化、模糊推理和反模糊化得到输出。由于模糊控制器单独控制时有控制精度不高的缺点,故将模糊控制与PID控制相结合,模糊控制器依据控制偏差e(t)和控制偏差的一阶微分量Δe(t)判断被控对象的工作状况,从而进行模糊判断,得到PID控制器参数KP、KI和KD对应的调节量,实现PID控制器的参数自整定。模糊自整定PID控制器原理如图3所示。
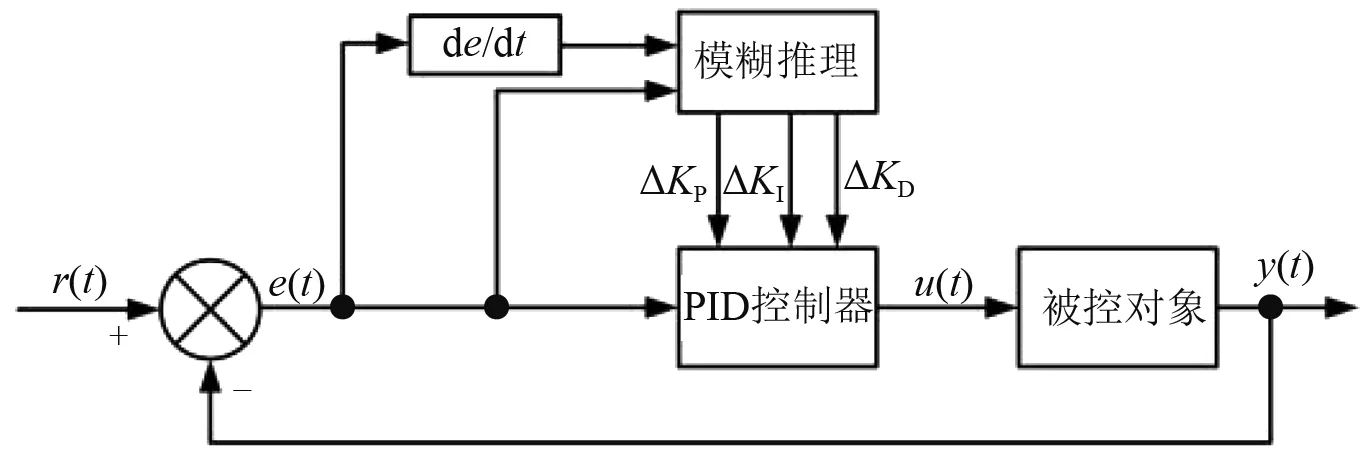
图3 模糊自整定PID控制器原理图
由此,得到模糊自整定PID控制器的参数整定形式如下:
(4)
模糊推理系统将输入和输出变量分为七个等级:{NB、NM、NS、ZE、PS、PM、PB}。对应的输入输出隶属度函数则采用无间隙均匀叠加的函数,以保证控制器控制效果的稳定性。针对PID控制器的控制特性,PID参数的整定规则如下[9]:
(1) 当控制偏差|e(t)|较大时,ΔKP应取正值以增大比例系数KP,使系统快速响应偏差变化。
(2) 当e(t)和Δe(t)处于中等大小时,ΔKI和ΔKD取中等值以避免系统出现超调。
(3) 当控制偏差e(t)较小时,ΔKI取正值提高积分作用,以快速减小系统静差。
相应模糊规则表如表1~表3所示。

表1 Kp参数调节模糊规则表

表2 Ki参数调节模糊规则表

表3 Kd参数调节模糊规则表
1.3 布谷鸟搜索算法
布谷鸟搜索算法是Yang Xinshe和Suash Deb于2009年提出的一种高效的元启发式优化算法。该算法模拟了自然界中布谷鸟的寄生繁殖行为。布谷鸟搜寻其他鸟类的巢穴产卵,布谷鸟的雏鸟会率先孵化并驱逐巢穴中的其他蛋和雏鸟。一些寄主鸟能够发现布谷鸟偷偷产下的蛋,它们会扔掉布谷鸟的蛋或是抛弃这个巢穴重新建立一个新的巢穴。布谷鸟为了提高蛋的存活率,会使自己的蛋模仿寄主鸟蛋的颜色和样式。由此,布谷鸟算法应满足以下三项规则[10]:
(1) 每只布谷鸟每次会随机挑选一个巢穴产卵,且只产下一个蛋。
(2) 优质的宿主巢穴会传递到下一代。
(3) 迭代前预设一定数量的巢穴,在每一代的迭代中宿主有概率pa∈[0,1]发现布谷鸟蛋。宿主发现布谷鸟蛋后会抛弃该巢穴并重建一个全新的巢穴,保持巢穴数量与预设的数量相同。
布谷鸟搜索算法流程如图4所示。

图4 布谷鸟搜索算法流程


(5)


2 仿真试验
本文主要研究伺服云台在风阻力矩干扰时的控制器控制效果。采用MATLAB R2016a来模拟各控制器的控制效果。电机模型采用无刷直流电机模型(BLDCM)[11],电机参数设置如下:定子相绕组电阻R=3.5 Ω,互感M=-0.061 H,转动惯量J=0.005 kg·m2,极对数p=14,24 V直流电源供电。
为分析本文所设计的基于布谷鸟搜索算法优化的模糊PID控制器的控制效果,分别测试其对于阶跃信号和正弦信号的响应情况,并与传统PID控制器、优化PID控制器的控制效果相对比。
2.1 控制器仿真参数整定
传统PID控制器参数采用ZN临界比例法进行整定[12],得到控制器参数KP=55.4,KI=250,KD=0.001。通过布谷鸟搜索PID控制器参数和模糊控制参数进行优化,得到优化PID控制器和模糊PID控制器[13]。优化PID控制器参数为:KP=98.9,KI=512.3,KD=8.2。使用模糊控制器实时整定优化PID控制器参数构建模糊PID控制器,模糊控制器的输入论域如下[14-15]:
e(t):{-0.15,-0.1,-0.05,0,0.05,0.1,0.15}
Δ(t):{-3,-2,-1,0,1,2,3}
模糊控制器输出论域如下:
ΔKP:{-98.9,-65.9,-33.0,0,497.4,994.8,1 492.2}
ΔKI:{-512.3,-341.5,-170.8,0,379.6,759.2,1138.8}
ΔKD:{-2.34,-1.56,-0.78,0,0.78,1.56,2.34}
2.2 控制器响应曲线
图5为伺服云台阶跃响应曲线。由图5可知,传统PID控制器和优化PID控制器需要1.2 s跟踪到目标转角位置,模糊自整定PID控制器需要0.34 s跟踪到目标转角位置。在1.3 s时加入一个5 N·m负载扰动。由图5放大部分可知,传统PID控制器和优化PID控制器需要0.47 s才能恢复稳定,而模糊自整定PID 控制器仅需要0.18 s就能恢复稳定。当出现负载扰动时,传统PID控制器、优化PID控制器和模糊自整定PID控制器受干扰的最大偏差值分别为0.41°、0.21°和0.083°;伺服云台稳定后,传统PID控制器、优化PID控制器和模糊自整定PID控制器的静差分别为0.064 6°、0.055°、0.031 2°。
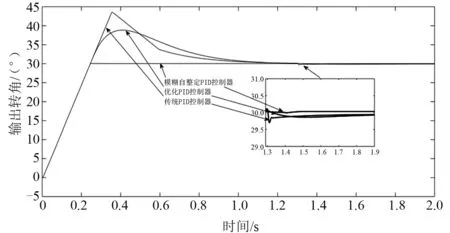
图5 伺服云台阶跃响应曲线
图6为伺服云台跟踪正弦信号的误差曲线图,正弦信号幅值为3°,频率为2 Hz,初始相位为0°。由图6可知,传统PID控制器、优化PID控制器和模糊自整定PID的最大跟踪误差分别为0.201°、0.088°和0.042°。模糊自整定控制器相比传统PID控制器和优化PID控制器,其跟踪精度分别提高了79.1%和52.3%。

图6 误差曲线图
3 结束语
本文针对伺服云台在环境干扰下难以控制的问题,结合PID控制器和模糊控制方法设计了一种模糊自整定PID控制器。利用模糊控制对PID参数进行实时整定以提高控制器对环境干扰的适应能力。应用了布谷鸟搜索算法对控制器各项参数进行了整定和优化,以简化参数整定过程,并对各项参数进行全局优化以取得良好的控制效果。经仿真试验,所设计的模糊自整定PID控制器具有良好的控制效果和抗干扰特性。
