基于模糊控制的纯电动汽车能量管理策略研究
2021-06-08王琦刘胜永郑致飞
王琦 刘胜永 郑致飞
摘 要:由于在设计纯电动汽车逻辑门限能量管理策略时往往只考虑单一因素影响,未考虑整车可用功率,因此,提出基于模糊控制的能量管理策略,运用此策略可以在动力电池总能量不变的前提下提升纯电动汽车续航里程. 首先将纯电动汽车能量管理系统作为研究对象,在分析动力系统结构和能量管理系统功率流关系的基础上,采取以加速踏板开度的变化率、电机转速、整车可用功率为模糊控制器输入,以电机需求扭矩为输出的mamdani型结构设计模糊控制能量管理策略,利用AVL Cruise软件搭建整车仿真模型,通过Cruise与 MATLAB /Simulink联合仿真验证该策略的有效性.研究表明:所设计的模糊控制能量管理策略具有较强的鲁棒性,控制效果好,相比传统的基于逻辑门限的能量管理策略,采用模糊控制算法后在NEDC工况下百公里电量消耗下降了15.2%,续航里程延长了15.1%.
关键词:纯电动汽车;能量管理策略;模糊控制;Cruise仿真
中图分类号:TM912 ;U469.72 DOI:10.16375/j.cnki.cn45-1395/t.2021.02.014
0引言
隨着全球能源、资源的枯竭以及生态环境恶化等问题的加剧,传统燃油车的发展受到了多方的制约[1].为了解决能源紧缺和环境问题,各国政府近些年开始大力发展纯电动汽车[2-4].但是,纯电动汽车也面临一个急需解决的难题,那就是锂离子电池的能量密度正接近其理论上限[5],很难使具有有限电池能量的纯电动汽车提升续航里程[6].
纯电动汽车能量管理系统能够在满足车辆基本动力性、稳定性等技术性能的条件下使能量在车辆的能量转换装置之间按照最优的路径流动,进而实现整车的能量利用率最高[7].因此,对纯电动汽车设计一个合理的能量管理策略能够在有限容量的动力电池下最大限度地提高系统的效率[8],延长车辆续航里程.
相关研究人员对纯电动汽车能量管理策略进行了大量实验分析,并取得了一定的成果.王佳等[9-11]在基于逻辑门限能量管理系统控制策略的基础上引入了模糊控制算法,降低了整车能量消耗量,但在制定能量管理策略时只考虑单一影响因素,未考虑到整车可用功率对能量管理策略的影响.
因此,在分析整车动力系统结构以及能量管理系统功率流关系的基础上,提出一种基于模糊控制的能量管理策略.采用以加速踏板开度的变化率、电机转速、整车可用功率为模糊控制器输入,以电机需求扭矩为输出的三输入、单输出的mamdani结构设计模糊控制策略,通过AVL Cruise软件建立整车模型,利用interface联合仿真方式进行仿真.通过与基于逻辑门限的能量管理策略相对比,证明了基于模糊控制的能量管理策略具有较理想的动力性和经济性.
1纯电动汽车的动力系统结构及功率
流分析
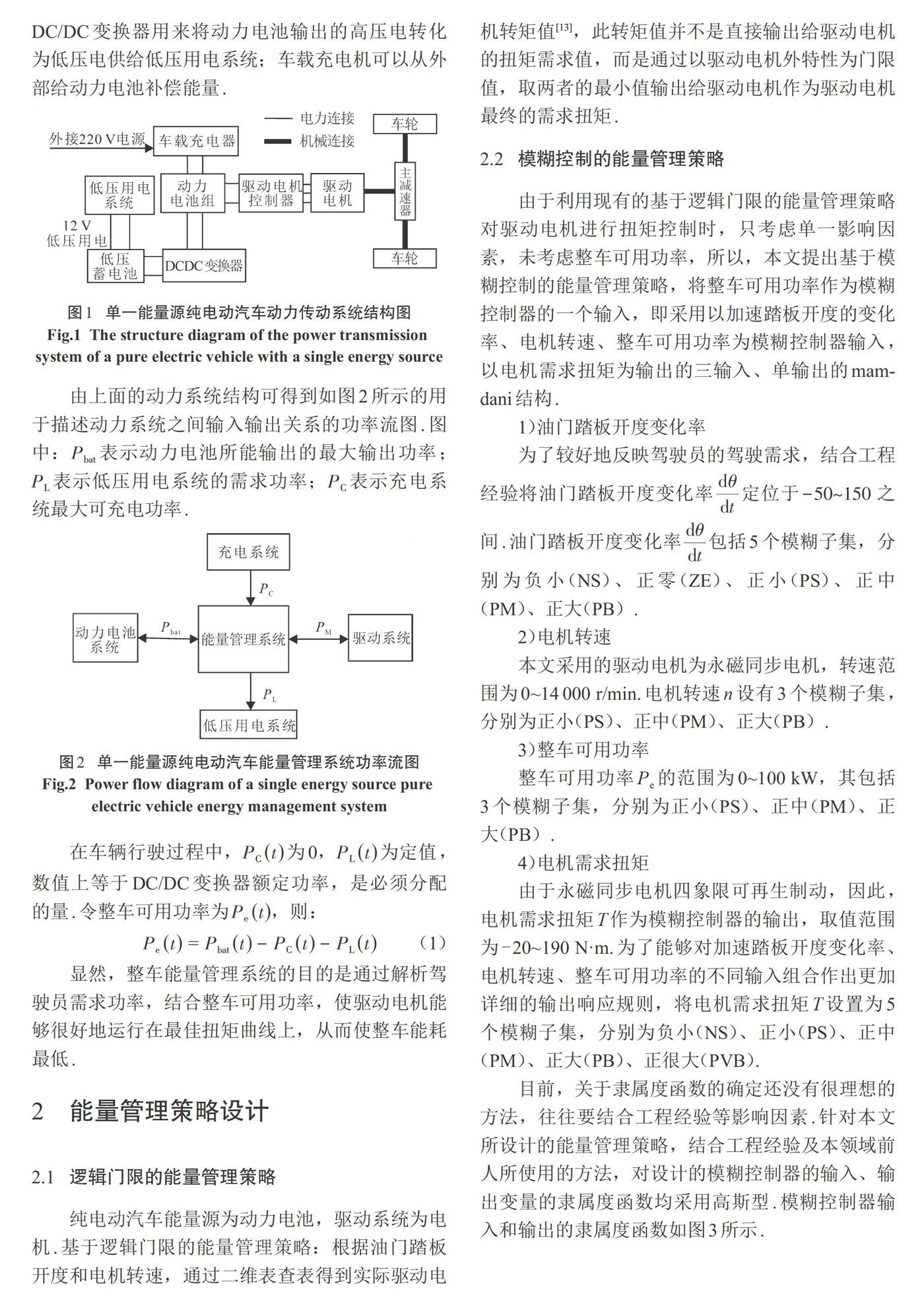
以单一能量源纯电动汽车作为研究对象,其动力系统主要由驱动电机、动力电池、主减速器、差速器等组成[12],其结构如图1所示.其中,驱动电机主要用来驱动车轮转动使整车行驶,也可在驾驶员踩下制动踏板或松开油门踏板时回收部分能量;动力电池主要用来为整车的各用电部件提供能量;DC/DC变换器用来将动力电池输出的高压电转化为低压电供给低压用电系统;车载充电机可以从外部给动力电池补偿能量.
由上面的动力系统结构可得到如图2所示的用于描述动力系统之间输入输出关系的功率流图.图中:[Pbat]表示动力电池所能输出的最大输出功率;[PL]表示低压用电系统的需求功率;[PC]表示充电系统最大可充电功率.
在车辆行驶过程中,[PCt]为0,[PLt]为定值,数值上等于DC/DC变换器额定功率,是必须分配的量.令整车可用功率为[Pet],则:
[Pet=Pbatt-PCt-PLt](1)
显然,整车能量管理系统的目的是通过解析驾驶员需求功率,结合整车可用功率,使驱动电机能够很好地运行在最佳扭矩曲线上,从而使整车能耗最低.
2能量管理策略设计
2.1 逻辑门限的能量管理策略
纯电动汽车能量源为动力电池,驱动系统为电机.基于逻辑门限的能量管理策略:根据油门踏板开度和电机转速,通过二维表查表得到实际驱动电机转矩值[13],此转矩值并不是直接输出给驱动电机的扭矩需求值,而是通过以驱动电机外特性为门限值,取两者的最小值输出给驱动电机作为驱动电机最终的需求扭矩.
2.2 模糊控制的能量管理策略
由于利用现有的基于逻辑门限的能量管理策略对驱动电机进行扭矩控制时,只考虑单一影响因素,未考虑整车可用功率,所以,本文提出基于模糊控制的能量管理策略,将整车可用功率作为模糊控制器的一个输入,即采用以加速踏板开度的变化率、电机转速、整车可用功率为模糊控制器输入,以电机需求扭矩为输出的三输入、单输出的mamdani结构.
1)油门踏板开度变化率
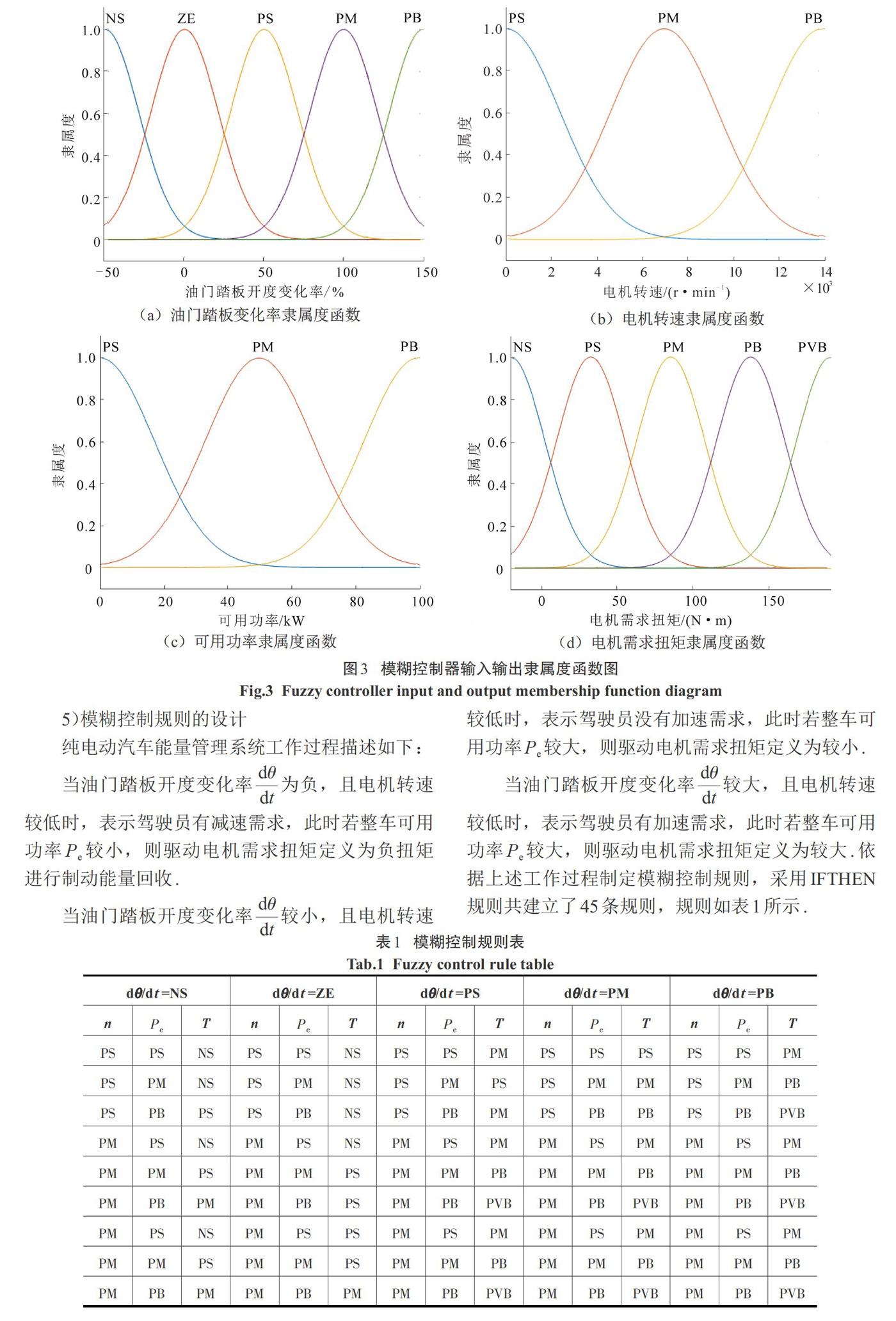
为了较好地反映驾驶员的驾驶需求,结合工程经验将油门踏板开度变化率[dθdt]定位于[-50~150] 之间.油门踏板开度变化率[dθdt]包括5个模糊子集,分别为负小(NS)、正零(ZE)、正小(PS)、正中(PM)、正大(PB).
2)电机转速
本文采用的驱动电机为永磁同步电机,转速范围为[0~14 000] [r/min].电机转速[n]设有3个模糊子集,分别为正小(PS)、正中(PM)、正大(PB).
3)整车可用功率
整车可用功率[Pe]的范围为[0~100] [kW],其包括 3个模糊子集,分别为正小(PS)、正中(PM)、正大(PB).
4)电机需求扭矩
由于永磁同步电机四象限可再生制动,因此,电机需求扭矩[T]作为模糊控制器的输出,取值范围为[-20~190] [N·m].为了能够对加速踏板开度变化率、电机转速、整车可用功率的不同输入组合作出更加详细的输出响应规则,将电机需求扭矩[T]设置为5个模糊子集,分别为负小(NS)、正小(PS)、正中(PM)、正大(PB)、正很大(PVB).
目前,关于隶属度函数的确定还没有很理想的方法,往往要结合工程经验等影响因素.针对本文所设计的能量管理策略,结合工程经验及本领域前人所使用的方法,对设计的模糊控制器的输入、输出变量的隶属度函数均采用高斯型.模糊控制器输入和输出的隶属度函数如图3所示.
5)模糊控制规则的设计
纯电动汽车能量管理系统工作过程描述如下:
当油门踏板开度变化率[dθdt]为负,且电机转速较低时,表示驾驶员有减速需求,此时若整车可用功率[Pe]较小,则驱动电机需求扭矩定义为负扭矩进行制动能量回收.
当油门踏板开度变化率[dθdt]较小,且电机转速较低时,表示驾驶员没有加速需求,此时若整车可用功率[Pe]较大,则驱动电机需求扭矩定义為较小.
当油门踏板开度变化率[dθdt]较大,且电机转速较低时,表示驾驶员有加速需求,此时若整车可用功率[Pe]较大,则驱动电机需求扭矩定义为较大.依据上述工作过程制定模糊控制规则,采用IFTHEN规则共建立了45条规则,规则如表1所示.
依据上述工作过程制定模糊控制规则,采用IF-THEN规则共建立了45条规则,规则如表1所示.
利用MATLAB/Simulink库中相关模块搭建2.2节描述的控制策略的模型.图5为基于模糊控制的模型.
3.1 动力性能仿真分析
通过Cruise与MATLAB /Simulink联合仿真可以精确计算出整车的动力性仿真结果[14].图6是基于逻辑门限和模糊控制2种不同控制算法下百公里加速时间的对比图,从图6中可以看出,相比逻辑门限控制方法,基于模糊控制方法下0~100 km/h内各车速点对应的加速时间更小,说明基于模糊控制方法的整车加速性能更优.
将动力性仿真结果整理成表3,对比逻辑门限控制方法仿真结果可以看出:在百公里加速时间性能上,基于模糊控制的控制方法比逻辑门限控制方法提高了1.2%;在最大爬坡度性能上,基于模糊控制的控制方法比逻辑门限控制方法提高了14.7%.
3.2 经济性能仿真分析
一般情况下,以某一工况下车辆行驶百公里的电量消耗量作为整车的经济性衡量标准[15],即能量消耗率,单位为kW·h/(100 km).
按照国家标准,研究纯电动汽车的续驶里程需在满电状态下进行测试.通过在AVL Cruise软件的任务文件夹中添加循环工况(Cycle Run)并设置为NEDC循环工况来计算车辆的百公里电量消耗.
图7是在NEDC工况下基于逻辑门限和模糊控制2种不同控制算法下的SOC变化图,从图7中可以看出基于模糊控制方法的SOC下降速度要比基于逻辑门限的慢,表示利用模糊控制方法可以使动力电池在放电时达到更好的效果.
通过联合仿真得出经济性仿真结果,仿真结果见表4.对比逻辑门限控制方法仿真结果可以看出:基于模糊控制算法和逻辑门限算法下的百公里电量消耗分别为8.58 kW·h/(100km)和10.12 kW·h/(100km),相比逻辑门限控制方法,基于模糊控制算法的百公里电量消耗下降了15.2%;基于模糊控制算法和逻辑门限算法下的续航里程分别为426.02 km和370.03 km,相比逻辑门限控制方法,基于模糊控制算法的续航里程延长了15.1%.
4总结
针对纯电动汽车续航里程问题,通过分析已有的能量管理策略和整车动力系统结构,将整车可用功率作为影响纯电动汽车能量管理策略的一个因素,提出基于模糊控制的能量管理策略,利用AVL Cruise软件建立整车模型,通过interface联合仿真方式进行仿真验证.研究结果表明:基于模糊控制的能量管理策略相比基于逻辑门限的能量管理策略,在动力性能指标(百公里加速时间、最大爬坡度)上分别提高了1.2%、14.7%,在经济性能指标(百公里电耗)上下降了15.2%,续航里程延长了15.1%.
参考文献
[1] 刘卓然,陈健,林凯,等.国内外电动汽车发展现状与趋势[J].电力建设,2015,36(7):25-32.
[2] 吴雪颖,文春兰,林春兰,等.基于电流前馈解耦PWM的电动汽车阶段充电仿真[J].广西科技大学学报,2019,30(4):77-83.
[3] SEHRAWAT P,JULIEN C,ISLAM S S. Carbon nanotubes in Li-ion batteries:a review[J]. Materials Science and Engineering(B),2016,213:12-40.
[4] 张光磊,钟颖强.国内外电动汽车发展现状与趋势分析[J].中外企业家,2018(35):240.
[5] 王大为,罗悦齐.纯电动汽车发展面临的问题[J].汽车文摘,2019(8):22-31.
[6] 何忠霖,彭忆强,丁宗恒.纯电动汽车锂离子电池管理系统关键技术现状分析[J].汽车零部件,2019(1):71-76.
[7] 董冰,田彦涛,周长久.基于模糊逻辑的纯电动汽车能量管理优化控制[J].吉林大学学报(工学版),2015,45(2):516-525.
[8] 周美兰,严文淼,郭金梅.复合电源纯电动汽车整车控制器设计[J].哈尔滨理工大学学报,2019,24(2):73-80.
[9] 王佳,杨建中,蔡志标,等.基于模糊控制的纯电动轿车整车优化控制策略[J].汽车工程,2009,31(4):362-365.
[10] 高航.纯电动汽车制动能量回收控制策略研究[D].西安:长安大学,2019.
[11] 郭敏锐.基于能量管理策略的纯电动汽车续驶里程研究[J].自动化与仪器仪表,2017(6):19-21.
[12] 古毅.纯电动汽车基本结构及关键技术分析[J].汽车实用技术,2017(7):3-4,22.
[13] 李魁.基于Cruise和Simulink分布式驱动的纯电动汽车仿真[D].十堰:湖北汽车工业学院,2019.
[14] 黄凯,邱焕尧,王宏朋.基于cruise的纯电动车整车控制策略研究[J].汽车实用技术,2018(17):1-4.
[15] 余志生.汽车理论[M].北京:机械工业出版社,2009.
Research on energy management strategy of pure electric vehicle based on fuzzy control
WANG Qi1, LIU Shengyong*1, 2, ZHENG Zhifei1
(1. School of Electric and Information Engineering, Guangxi University of Science and Technology, Liuzhou 545006, China; 2. Guangxi Key Laboratory of Automobile Components and Vehicle Technology(Guangxi
University of Science and Technology ) , Liuzhou 545006, China)
Abstract: Since only a single factor is considered when designing a logic threshold energy management strategy for pure electric vehicles, and the available power of the vehicle is not considered, an energy management strategy based on fuzzy control is proposed. This strategy can improve the range of pure electric vehicles with the total power battery energy remaining unchanged. First of all, the pure electric vehicle energy management system is taken as the research object. A fuzzy control energy management strategy is designed with mamdani structure, which takes the change rate of pedal opening, motor speed and available power of the whole vehicle as the input of fuzzy controller and the required torque of the motor as the output. Then we build a vehicle simulation model using AVL Cruise software, and verify the effectiveness of this strategy through the combined simulation of Cruise and MATLAB/Simulink. The research shows that the designed fuzzy control energy management strategy has strong robustness and good control effect. Compared with the traditional energy management strategy based on logic threshold, the fuzzy control algorithm reduces the power consumption per 100 kilometers by 15.2% and the mileage increases by 15.1% under the NEDC conditions.
Key words: pure electric vehicle; energy management strategy; fuzzy control; Cruise simulation
(責任编辑:黎 娅)
收稿日期:2020-11-25
基金项目:2020年广西汽车零部件与整车技术重点实验室自主研究课题(2020GKLACVTZZ04)资助.
作者简介:王琦,硕士研究生.
通信作者:刘胜永,博士,教授,硕士生导师,研究方向:电力电子装置、新能源发电与控制技术,E-mail:liusypp@163.com.