无人机的智能机巢设计
2021-06-08刘茂丰王伟陆昱丞
刘茂丰 王伟 陆昱丞

【摘要】 为解决现无人机执行任务时,由于电池电量限制,而无法长久执行任务的弊端,本文设计一种可以自动更换电池的智能机巢。该系统以SIMATIC S7-200SMART作为系统核心处理单元,系统主要通过光电传感器检测无人机位置,PLC控制及时做出相应,控制机械手操作电池盒,进行更换电池操作。并且利用高精度定位系统RTK进行诱导降落。经过实验测试表明,本系统具备自主更换电池功能和诱导降落功能。
【关键词】 PLC 光电传感器 机械手 RTK
引言
随着无人机快速发展和广泛应用,无人机技术很好地解决了人们对工作上的需求[1]。在工作上,人们利用无人机进行架空电路的巡检,但因其电池影响,不能长久工作,需要人工更换电池,极大的降低了工作效率。传统的固定机巢,只具备控制无人机起降功能,保护无人机避免损伤。传统固定机巢以一块四平八稳的平台供无人机起降,该平台具备升降功能,在不需使用的时候,可以将无人机收纳在内部,可以有效保护无人机。
随着科技不断的发展以及市场需求的变化,传统的固定机巢不能满足人们对工作上的需求。传统的固定机巢需要人为选址放置,一般情况不轻易改变机巢位置,并且必须选取空旷且平稳的地方安置,因为无人机降落的时候会有误差,无法保证在降落的时候,不会碰撞周边物件,其作业范围有一定限制 [2]。而智能机巢指的是以合理的机械结构设计为基础,基于PLC控制,两者相辅相成,利用PLC控制机械手抓取电池或放入电池。利用STM32F405芯片搭建智信息交互的智能处理单元,高精度定位系统RTK和智能处理单元之间采用CAN通信[3-4],PLC控制和智能处理单元之间采用串口通信,高精度定位系统RTK获取当前智能机巢的经纬度位置,通过智能处理单元发送经纬度位置给无人机,来诱导无人机降落。因此研究巡检无人机的智能机巢具有重要意义。
一、系统总体方案设计
该系统框图如图1所示,该系统主要由智能处理单元(MCU)、RTK、PLC控制、机械手部分组成。其中MCU采用的是STM32F405芯片,主要负责数据的中转;RTK板卡部分主要提供精确的经纬度信息;PLC控制部分主要功能是接受到指令后,操作机械手;机械手的功能是抓取电池。
二、系统硬件设计
2.1 智能处理单元
智能处理单元采用ST公司的STM32F405系列芯片,该芯片是ARM的Cortex-M4系列内核,最高工作频率可达168 MHz,工作电压在 2.0V-3.6V。该芯片具有192KB的SRAM、512KB的FLASH,该系列芯片拥有高性价比、低功耗等特点。在此基础上搭载SIM7600CE-L的4G通信模块,该模块支持多种频段,用于和无人机进行数据交互。
2.2 高精度定位系统RTK
如下图2所示,RTK板卡采用诺瓦泰多频单侧板卡,支持多频测向和定位解算,同时支持双天线输入。
2.3 PLC控制系统
PLC控制系统采用SIMATIC S7-200SMART作为主控。S7-200有5中CPU模块,CPU226自带24输入和16输出,同时具有良好的可扩展性,使用中小型控制系统中,用于本课题所设计的智能机巢,已经足够。
2.4智能机巢设计
智能机巢由起降平台、机械手和电池仓组成。起降平台供无人机更换电池和起降。机械手为3轴自由度,分别X轴、Y轴和Z轴,每一个轴的机械手下方都安装两个光電传感器,一个在起点位置,一个在终点位置,可以判定机械手的移动状态。通过PLC控制电机转动,从而带动对应的机械手动作,最终可以完成更换电池操作[5]。如图3所示。
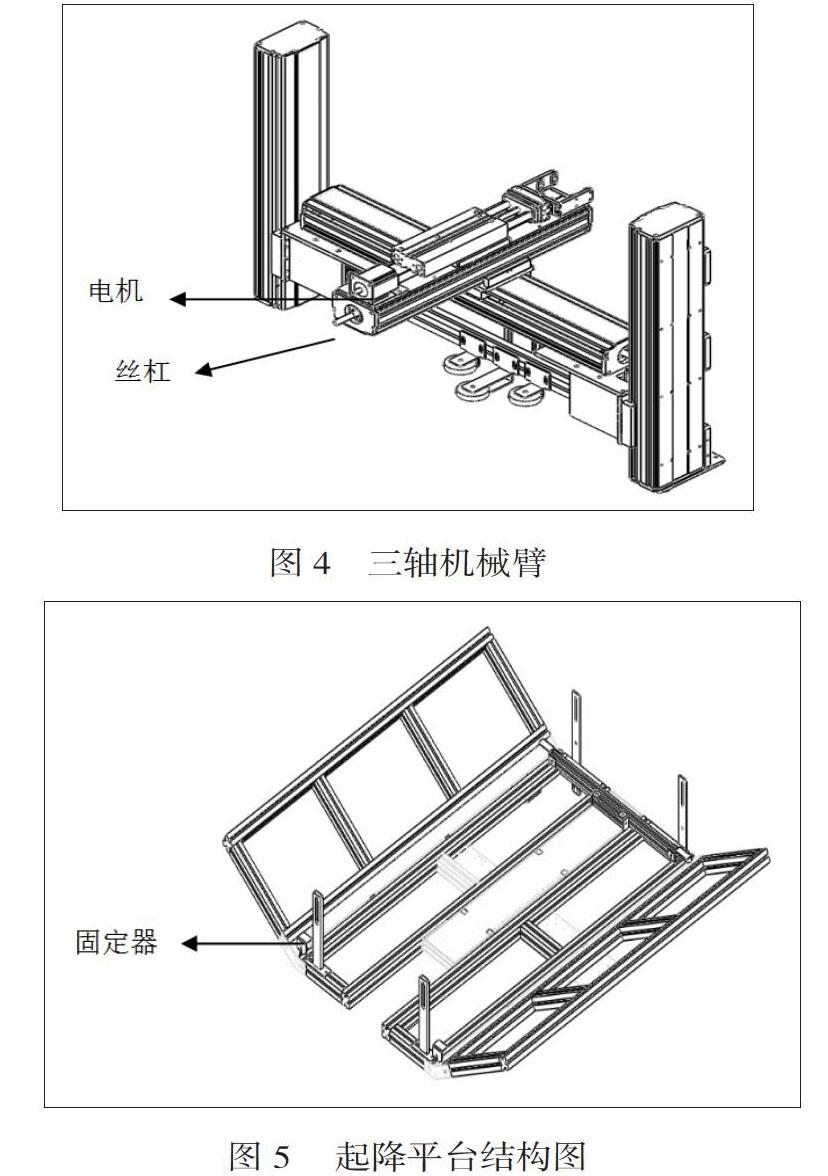
2.5 机械臂设计
三轴机械臂均由丝杠带动,从而向上、向下、向左、向右、向前和向后运动。丝杠由电机带动,如图4所示。
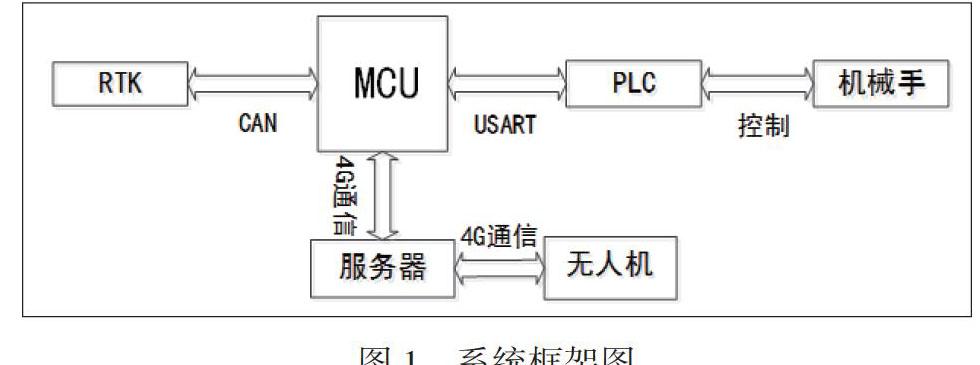
2.6 起降平台设计
起降平台有斜板和平板构成,斜板可以用作,无人机降落后,出现左右位置偏差,可以通过这种坡面,滑动至平板上,平板上有4处固定器,光电传感器检测到无人机降落后,固定器会自动向中间合拢,锁紧无人机。固定器由气缸带动。如图5所示。
三、系统功能实现
系统软件部分主要流程包括以下步骤:
(1)系统初始化,该过程主要包括机械臂初始化,机械臂归位于初始位置,等待指令下发。智能处理单元初始化,连接网络,后台控制中心可以获取到当前机巢的信息。RTK获取当前智能机巢经纬度位置。
(2)当无人机只想任务结束后,无人机通过4G通信模块,将即将降落的信息发送至服务器,服务器将该条信息转发至智能机巢,智能机巢获取到信息后,发送RTK已经获取到的机巢的经纬度至服务器,服务器将经纬度信息转发至无人机,至此,形成一个闭环。无人机开始降落,在降落的过程实时接受智能机巢发送来的经纬度信息,随时调整降落位置。
(3)无人机降落平稳后,智能机巢的起降平台上安装由固定器。无人机降落会影响光电传感器获取光源的数量,因此判断无人机已经降落,PLC会控制起降平台上的固定器将无人机脚架锁紧。
(4)PLC控制会发送控制命令,首先会移动X轴机械手向中间移动,当X轴机械手移动至终点位置时,光电传感器会检测到光亮的变化,从而获取到X轴机械手的位置状态。Z轴和Y轴的移动过程大致相同,不在描述。Y轴机械手上安装抓手,当三轴全部移动到指定位置后,PLC控制抓手抓取电池。抓手获取无人机电池后,PLC在控制3轴机械手原路返回,最终将电池插入机巢的电池仓中。系统在更具电池仓中电池的电量,选择符合要求的电池,利用抓手抓出后,在通过机械手送回无人机中。实现自主更换电池。
(5)当无人机重新获取充足电能后,首先先将准备指令发送至服务器,服务器获取后,转发指令到智能机巢,机巢松开固定器。无人机可以起飞。
四、结束语
针对市场的需求,本系统PLC作为核心控制,设计智能机巢。利用4G通信模块和高精度定位系统RTK,实时诱导无人机降落,可以将无人机的降落精度精确到厘米级。并且具备自主更换电池、成本低廉、操作简单等优点。该智能机巢在无人机巡检领域有较大的市场和应用价值。
参 考 文 献
[1]. 胡智敏,李凯,汤国锋,等.一种输电线路无人机“巢-巢”巡检新模式[J].江西电力,2018
[2] 韦舒天,李龙,岳灵平,等.输电通道人机协同巡检方式的探索[J].浙江电力,2016.
[3] 柴大帅. 高频单历元GNSS动态差分定位技术研究[D].山东科技大学,2017
[4] 李成钢.网络GPS/VRS系统高精度差分改正信息生成与发布研究[D].西南交通大学,2007. [5] 张波,李卫民,尚锐.多功能上下料用机械手液压系统 [J]. 液压与气动,2012(8):31-32.
