视觉的机器人分拣系统的设计与研究
2021-06-08郑灿香
郑灿香
【摘要】 现在事情都会用机器人代替人工,如同分拣工作中的物料识别和定位都是通过机器视觉结合工业机器人,对于动物视觉的定位方法和物料测距问题的提出。其主要工作原理就是根据工业机器人末端的摄像头移动后产生的,主要是对不同坐标、不同位置作出连续单点拍摄,然后获得与眼睛视觉测距的重要参数,从而保证了运动测距和定位功能的实现。
【关键词】 视觉库 机器人 分拣系统 自动 识别
引言
现在我国生产制造业开始向柔性加工方向发展。我国工业机器人开始到自动化生产线中进行工作,使用最多的是器械物料装配、码垛、焊接等场景。机器人的使用降低了生产成本,并有效提高了企业柔性加工生产水平。
为进一步加强工业机器人的加工柔韧性,必须要提升工业机器人的自主性。将机器视觉技术应用于工业机器人上,可以设计出基于机器视觉的自动分拣系统。该系统可以有效提高分拣成功率,能为企业做出更大的贡献。
本文从摄像头弹幕测量、双目测距以及运动立体测距原理进行分析,然后对当下固定式单目相机自动分拣系统中得到单目移动视觉的测距方法和定位方法进行论述,还通过相关实验实现了产品位置和特征的识别,为机器人的抓取提供了具体坐标。
一、摄像头测距原理
1.1单目测量
图1为单目相机成像的基本原理,这种原理的性质与三角形相近。
由图1所示,摄像机到拍摄屏幕的距离用d表示,摄像机的焦距用f表示。将拍摄物体摆放到拍摄平面,拍摄物体的物理长度为L,则成像后的长度则表示为L。因此,单目像机的成像过程可以表示为:
为了更好的表示拍摄物体与成像物体之间的关系,特建立了四个坐标系。四个坐标系分别为图像像素坐标系Cp,图像物理坐标系C,相机坐标系Cc和世界坐标系Cw。因此,物体和图像之间的关系可以如公式(2)所示。
如公式(4)表示,xw,yw,zw是世界坐标系的三个维度,其主要用来表示相机的位置。R表示一个旋转矩阵,而T表示一个平移矩阵。
所以,如果我们把世界坐标系融入到图像像素坐标系会得到什么,如公式(5)所示:
单目测距是根据现实生活中标定物进行世界坐标向图像坐标的方向进行转变,当我们知晓Zc的特质后我们就可以通过相机图像中对实际事物图片其中的一个点进行空间位置的确认。可是,一旦相机焦距确定后,那么图像中物体更深层次的信息就不能得到解释[3]。
1.2双目测距
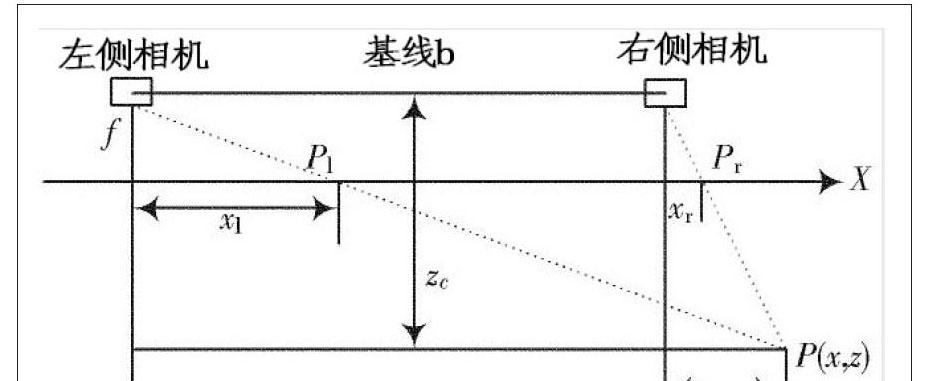
图2是双目测距的原理。其实双目相机与人类眼睛是一样的,因此,双目小鸡是通过眼睛视觉差下的深度相机,将相机安装在物体的左边和邮编,然后根据成像视觉差对世界坐标系统的双目相机和观测点的距离行计算。
在左侧和右侧分别放置一台相机,沿着两台相机的中点画一条线-基线b。假设物体为P(xc,zc),那么该物体的投影点分别为pl(xl,yl),pr(xr,yr)。因此,物体与像之间的关系可以如公式(6)所示:
通過公式(7)可以看出深度(z)和视觉差值(xl-xr)之间的关系是反比关系。视觉差结果会由距离的远近决定。通过移位差x得到相机像素就越高,水平位移的精准度就越高,所以,如果距离是一样的那么测距的精准度就越高。
1.3运动立体测距
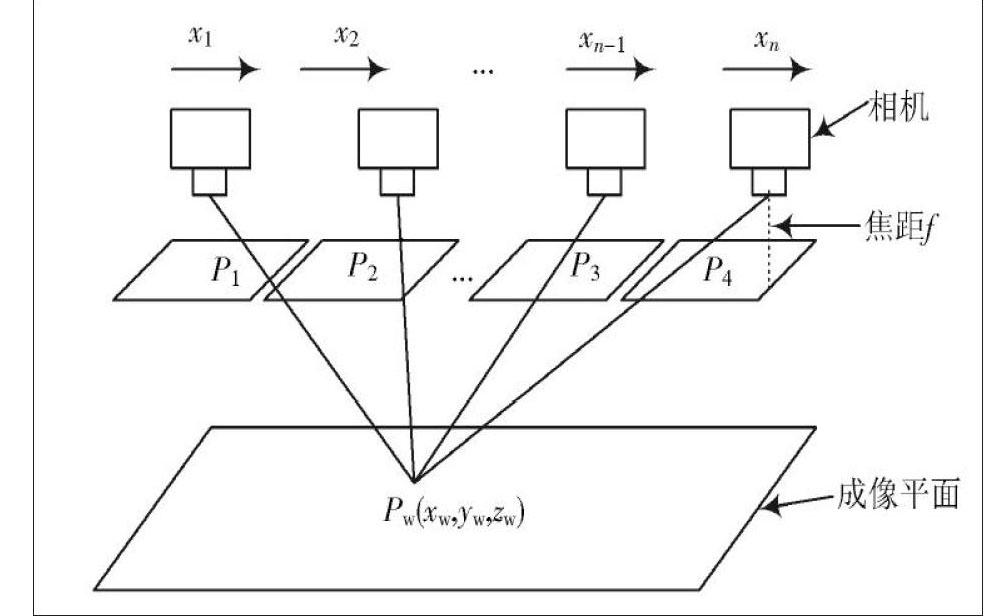
运动立体测距也是常用的一种测距方法,该方法主要通过改变相机的拍摄位置对物体进行拍摄。当相机进行移动时,将会生成多个图像。对不同的图像进行像素匹配,就可以计算出物的距离。
从图3中可以看出相机焦距f,世界坐标系中的其中一个点Pw,相机移动后的距离Pw。经过移动后,物体的像可以表示为P1、P2、P3、P4,因此每个一点采样点与基线采样点之间的距离可以表示为:
二、工业机器人测距实验
2.1相机标定
对相机进行标定后才可以进行测试实验,由于张氏标定法运用效率高、精准度高,所以本文采用一般使用张氏标定法对相机进行标定。运用Python当做代码做相机标定,然后选择棋盘格数和大小为4×6、5 mm×5 mm。标定三维点数据计算出来后,将计算值带入标定函数calibrateCamera并得到标定结果。
2.2运动测距
完成相机标定后,需要进行运动测距。目前常用的测距算法主要有BM,SGBM,GC,分别使用三种算法进行测距实验并得到视差深度图。拍摄物体的直径为60 mm,高度为10 mm,单次移动距离为100 mm。
根据实验结果证明,深度和尺寸的计算会受到相机不同物距的影响,如果在一定数值内相机就可以达到双目测距功能[5]。实验误差也会受到亮度、颜色、视差匹配算法的影响,所以,不同情况下算法和参数也是需要进行调整的。
三、结论
综上所述,单目相机相比双目相机来说差距很多,通过对单目进行运动测距后在一定情况下可以达到双目相机的效果。单目相机也可以在最短的时间内定位物品、抓取物品。另外,单目比双目相机的开发成本和难度比较低,如果精度要求不是那么严格的情况下单目相机可以采用。
参 考 文 献
[1]王捷,金明河,张国亮,胡海鹰,刘宏.视觉引导下机器人任意轨迹跟踪试验研究[J].机械与电子,2015(03):3-6.
[2]视觉SLAM中图像特征点提取与匹配算法研究[J].陈庆伟,李民东,罗川,周军,皇攀凌,李蕾.现代制造工程.2019(10)
[3]苏剑波.ADRC理论和技术在机器人无标定视觉伺服中的应用和发展[J].控制与决策,2015,01:1-8.
[4]任福继,孙晓.智能机器人的现状及发展[J].科技导报,2015,21:32-38.
[5]盛华军,等.视觉图像技术与机器人工件抓取的协作应用[J].自动化与仪表,2020,35(2):37-46.
