光电校靶中捷联惯导轴线的表征校准方法
2021-06-08杨海金高雪军朱佳丽费程波卞臻臻
杨海金,郝 芳,郭 明,张 平,高雪军,朱佳丽,费程波,卞臻臻,梁 琦
(江苏北方湖光光电有限公司,江苏 无锡 214035)
引言
随着惯导技术的发展,越来越多的设备利用惯导的惯性测姿优势进行一定的姿态测量,而这种测量过程中通常将光电测量设备与惯导相结合[1-2],形成捷联式的安装形式,既保证了设备的精度要求,也提高了设备的综合可靠性。
在新型的光电校靶产品中,利用自准直仪与惯导的各自优势,发挥光电自准直仪的光学特性实现光学轴线对准,继而通过惯导获取出光学轴线的惯性姿态,实现对相应设备的空间轴线姿态测量。通过这种轴线姿态的测量方式[3-5],可以实现对相应产品的惯性测量。在该类设备中,需要将自准直仪的光轴与惯导的轴线校准一致,使得两者的姿态关系差最小,关系差越小则可以获得越高的测姿精度。而对这类产品的校正往往受到各类不确定因素的影响,从而使得测姿精度下降[6-7]。
本文基于捷联惯导系统轴线的表征和实际应用,通过分析光机校正和光电校准两种校准方法,对捷联轴线一致性校准产生的精度进行了详细分析,并总结了该类技术问题的校正方法及调校措施,为以后该类产品的校准提供了参考。
1 光机校正方法
惯导为捷联式,其数字轴系是在三轴转台上通过标定建立的[8-10],对外表现为安装靠面,因此可利用该靠面对自准直光轴进行校准。图1为光机校正示意图。
自准直仪安装于惯导基准面A上,其光轴需和惯导横滚轴平行,而惯导横滚轴可用基准面B的垂直线代表[11]。校正时将一平晶紧靠基准面B上,前方放置一自准直经纬仪对平晶进行自准,此时自准直经纬仪光轴与平晶表面垂直,即是同惯导横滚轴平行;取下平晶,自准直经纬仪方位和俯仰保持不变;通过自准直经纬仪观察自准直仪出射的分划;调整自准直仪的安装方向,使其出射分划瞄准自准直经纬仪分划,即认为惯导光轴与自准直仪光轴一致。
光机校正的精度一般都不高,其主要误差来源于基准面B与惯导轴的垂直性,目前捷联惯导是通过基准面固定在三轴转台上进行标定和测试[12-13],而台体上惯导的安装面与转台的旋转轴垂直性要求不高,这就直接影响惯导基准面与惯导轴之间的垂直性,影响了校准的精度。因此在高精度系统中必须采用更高精度的校正方法。
2 光电校准方法
捷联惯导轴为数字虚拟轴,如果知道自准直光轴与惯导轴的角度偏差,即可通过数学计算方法将惯导轴转换到一个与自准直光同轴的轴系中[12-13],而自准光轴与惯导轴的偏差可由下列方法得到。
将2面平面反射镜成一定夹角水平放置,并利用自准直经纬仪将每面反射镜的法线调整至水平状态,再测量出2面反射镜在水平向的夹角α,如图2所示,则2面反射镜的姿态变化为:方位α,俯仰0°。

图2 光电校准示意图Fig.2 Schematic diagram of photoelectric correction
将惯导组件上电、自对准后,用惯导上的自准直仪对反射镜1进行光学自准,并记录此时惯导组件的姿态数据;再用自准直仪对反射镜2进行光学自准,并记录此时惯导组件的姿态数据。由于自准直光轴与惯导轴之间存在着角度偏差,所以惯导姿态变化将不会是方位α、俯仰0°,将偏差分别设为方位Δα、俯仰Δβ。
图3为自准直光轴与惯导轴在方位向偏差角γ为0.02°、0.05°、0.1°时(经过粗校后值较小),反射镜夹角α与偏差Δα、Δβ之间的关系。

图3 水平向偏差时反射镜水平夹角对惯导轴偏差的影响Fig.3 Influence of mirror horizontal angle on inertial navigation axis deviation at horizontal deviation
图4为自准直光轴与惯导轴在俯仰向偏差角λ为0.02°、0.05°、0.1°时(经过粗校后值较小),反射镜夹角α与偏差Δα、Δβ之间的关系。

图4 俯仰向偏差时反射镜水平夹角对惯导轴偏差的影响Fig.4 Influence of mirror horizontal angle on inertial navigation axis deviation at pitching deviation
可以看出,当惯导轴与自准直光轴在方位向存在偏差时,用2面水平成夹角的反射镜测量出的惯导姿态变化几乎和反射镜姿态变化一致。而当惯导轴与自准直光轴在俯仰向存在偏差时,惯导姿态变化与反射镜姿态变化差异明显,特别是俯仰向的差异。在α=180°时,偏差Δβ几乎是偏差λ的两倍,因此可根据2次惯导的姿态变化数据近似拟合出惯导轴与自准直光轴在俯仰向的偏差角。
同样将2面平面反射镜成一定夹角垂直放置,并利用自准直经纬仪将每面反射镜的法线调整在垂直面内,再测量出2面反射镜在俯仰向的夹角β,如图5所示,则2面反射镜的姿态变化为:方位0°,俯仰β。
图5为自准直光轴与惯导轴在方位向偏差角γ为0.02°、0.05°、0.1°时(经过粗校后值较小),反射镜夹角β与偏差Δα、Δβ之间的关系。
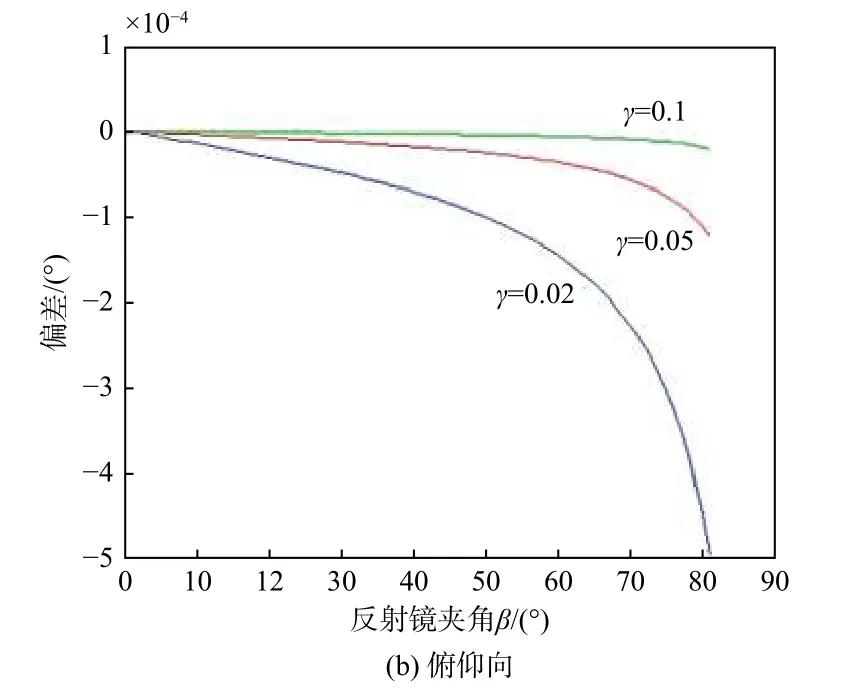
图5 方位向偏差时反射镜垂直夹角对惯导轴偏差的影响Fig.5 Influence of mirror vertical angle on inertial navigation axis deviation at azimuth deviation
图6为自准直光轴与惯导轴在方位向偏差角λ为0.02°、0.05°、0.1°时(经过粗校后值较小),反射镜夹角β与偏差Δα、Δβ之间的关系。

图6 俯仰向偏差时反射镜垂直夹角对惯导轴偏差的影响Fig.6 Influence of mirror vertical angle on inertial navigation axis deviation at pitching deviation
同样可看出,当惯导轴与自准直光轴在俯仰向存在偏差时,用2面垂直成夹角的反射镜测量出的惯导姿态变化几乎和反射镜姿态变化一致。而当惯导轴与自准直光轴在水平向存在偏差时,惯导姿态变化与反射镜姿态变化差异明显,特别是方位向的差异。在β=60°时,偏差Δβ几乎与偏差γ相等,因此可根据两次惯导的姿态变化数据近似拟合出惯导轴与自准直光轴在水平向的偏差角。
3 实验与结果
3.1 实验装置
测量装置如图7所示,方位向有7个反射镜,将其中1个反射镜作为基准反射镜,其余6个反射镜的方位向与基准反射镜成一定夹角,角度值根据测试需要设定,用经纬仪进行标定,俯仰向夹角小于15″,表征惯导的方位。俯仰向7个反射镜同方位的7个反射镜安装方式和标定方法一样,表征惯导的俯仰。该装置右侧安装一块基准镜,其法线方位与中间基准镜夹角为90°±15″,俯仰向夹角小于15″,表征惯导的横滚。本装置采用T3经纬仪标定,精度为2″。

图7 实验场景Fig.7 Experimental scene
3.2 实验结果
按照上述方法,将惯导组件上电,利用惯导上自准直仪对该装置中间和右侧两基准镜光学自准,获取基准轴,然后分别对方位和俯仰向的10个反射镜光学自准,测量得到10组数据。根据这些数据,采用最小二乘法对偏差角度进行迭代计算。为了确保计算结果正确,可以再次测量1组数据,将迭代结果代入计算,检查误差是否满足要求。经过计算与验证,得到惯导轴与自准直光轴之间的偏差为:方位−0.01°,俯仰−0.70°。再利用该偏差对惯导数据进行修正,得到修正后的数据偏差[14-15],如表1所示。

表1 试验数据表Table 1 Experimental data
从表1可以看出,修正后的惯导测量数据与自准直经纬仪测量值非常接近,可以近似认为惯导轴与自准直仪光轴一致。
4 结论
本文采用光电自准直仪表征惯导轴线,并针对捷联安装的轴线一致性校正问题,分别采用光机校正和光电校准2种方法,进行了惯导轴与自准直仪光轴的一致性校准。实验证明,光机校正属于粗略校正,由于各种原因,校正的精度很难达到系统要求;而光电校准属于精确调校,可达到秒级精度。从理论上来说,光电校准可以适用于任何角度的偏差校正,即无需进行光机粗校正也可以进行。实际上,由于机械、光路等系统原因,一般首先进行光机粗略校正,保证光轴与机械结构偏差不大,再进行光电精确校准,确保系统精度。二者结合使用可提高校正效率,同时惯导和光轴一致性精度在15″以内,轴线表征准确度高。
