车辆纵向避撞系统仿真与建模
2021-06-04刘明成申荣卫
刘明成,申荣卫
(天津职业技术师范大学汽车与交通学院,天津 300222)
1 避撞系统的总体设计
在联合仿真中车辆避撞系统由三部分组成,分别为环境感知、中央决策、执行机构。其具体的组成如图1所示。
及时获取本车和前车的运动信息是实现车辆避撞的首要条件,运动信息包括:本车的加速度、本车车速、本车发动机的转速、两车的相对车速、相对距离等信息,其中本车的信息主要是依靠各种车载传感器获取,车辆间的参数主要是依靠车载雷达来获取,目前比较先进的车载雷达是毫米波雷达。
本车车载传感器会实时获取运动信息,防撞系统会根据这些运动信息及时计算出本车理论安全距离的最小值,并且与实际的车距来进行对比,避撞系统根据对比结果来判断当前的安全状态,并将相应的控制指令发送到执行器。
控制指令需要在执行器中实现,避撞系统通过调节节气门开度或制动压力来实现车辆的变速运动。

图1 避撞系统组成
2 车辆模型的建立
2.1 Carsim车辆动力学模型建立
Carsim软件可以较精确地搭建车辆动力学模型,在整车仿真中只需要输入关键的参数,便可以实现车辆建模并且对模型进行分析,Carsim建模将整车分为转向系、制动系、传动系、悬架、车身、车轮、空气动力学七部分。
所选车型为两厢式小轿车,前轮驱动,发动机功率为125kW,ABS功能,传动系为六速变速器,关于其他车辆设置采用软件的默认设置。
2.2 车辆逆动力学模型的建立
车辆在实际行驶过程中,对油门和制动踏板的控制是分开的,若需要加速行驶,踩下油门,节气门开度变大,实现车辆加速;若需要减速,松开制动踏板,在空气和滚动等阻力作用下汽车会减速。当这些阻力达不到所需要的减速度时,此时需要制动踏板来提供足够的制动力。因考虑到车辆的舒适性以及在加速和减速间的平稳切换,需要设置节气门和制动踏板的切换逻辑。
如图2所示即为在不同车速下松开油门和制动踏板减速度的最大值,在切换区域设置宽度为△h=0.02g过渡区域[1]。
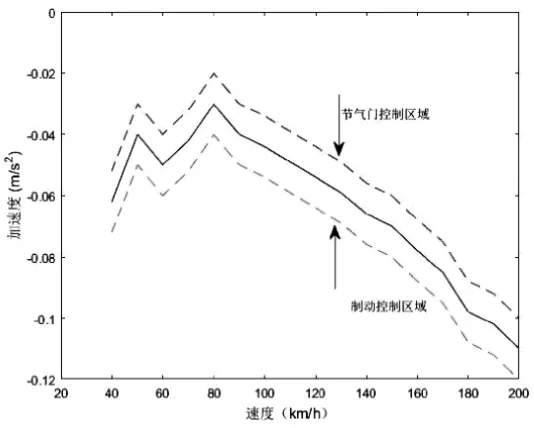
图2 切换逻辑
(1)当ades> a+△ h,为节气门控制,制动器无操作。(2)当 ades<a-△h,为制动器控制,节气门无动作。(3)a-△h<ades<a+△ h时,维持当前状态,不进行切换。
2.2.1 节气门控制
若汽车需要加速行驶,则需要将期望加速度 ades的大小转化为期望发动机力矩Tdes。
汽车运动方程如下:

在式(1)中:Ft表示车辆受到的驱动力,∑F(v)表示车辆受到的阻力之和。即:

在式(2)中:ρ为空气阻力,f为汽车滚动阻力系数,CD为空气阻力系数。A为迎风面积,
驱动力计算公式如下:
其中:η为机械效率;Te为发动机输出的扭矩;为液力变矩器扭矩特性函数;Rg为变速器挡位速比,Rm为主减速速比,Kd为实时计算的量。
求出期望的发动机扭矩Tdes和期望减速度ades,根据发动机map图,即可得期望节气门开度αdes[2]:。
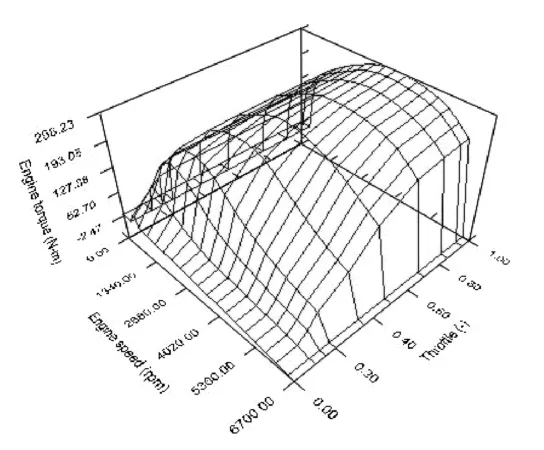
图3 发动机扭矩图
2.2.2 制动控制
车辆在水平路面上行驶受到的阻力为:

联立(7)(8)得:

在Carsim中进行车辆仿真,得到系数Kb=1612。
3 控制器设计
控制器作为决策单元是发挥系统安全性的关键环节。从驾驶员舒适性、安全性等方面来考虑,控制系统采用分层控制方案。
3.1 上层控制器设计
上层控制器一般都是采用经典的PID控制,该控制算法简单、稳定性好,在PID控制中,最主要的是确定kP、kI、kD,经过多次的设定,确定PID的三个参数数值依次为:kP=5、kI=10、kD=0.02。
3.2 下层控制器设计
基于模糊控制的上层控制器如图4所示。
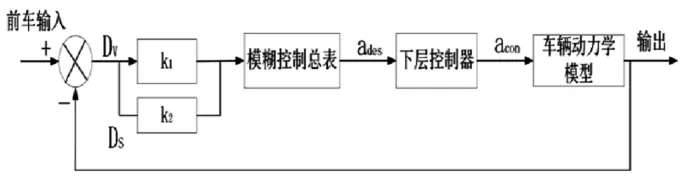
图4 基于模糊控制的上层控制器
模糊控制是根据人的经验来构建,驾驶员一般是根据前后车距与当前车速来估算当前车辆安全状态。因此将实际距离与安全距离的差作为输入量[3]。

式中,dr表示实际车间距离,dh表示期望车间距离,v前表示前车车速,v后表示后车车速。
将输入和输出作为七种不同的模糊语言来表示。分别是:正大(PB)、正中(PM)、正小(PS)、零(ZO)、负小(NS)、负中(NM)、负大(NB)。
3.2.1 输入和输出的模糊化
设置的相对速度的论域为[-60,60]km/h,实际车距与安全车距的差值论域为[-25,25]m,自车的加速度论域为[-5,0]m/s2。
3.2.2 隶属度函数的确定
查阅相关的资料得知,输入信号隶属度函数为高斯函数[4]。

图5 车距差隶属度函数

图6 速度差隶属度函数
3.2.3 模糊规则的建立
(1)dv较小,而Ds较大时,此时车辆处于安全状态,维持当前车速即可。
(2)dv很小,而Ds很小,此时车辆处于危险状态,应该采取较大制动力,避免事故的发生。
(3)dv和Ds都较大或者较小时,可以进行轻微制动,提前远离危险工况。
根据以上三条来制定以下 49条模糊控制规则,如图 8所示。
模糊关系可以很好地体现出输入与输出的复杂的非线性关系,这种关系实际符合人的逻辑推理,容易被接受。
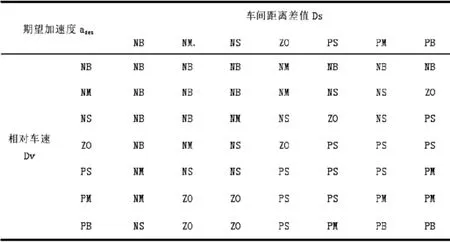
图8 模糊控制规则
4 联合仿真
车辆在制动时,其舒适性的主要评价指标为汽车冲击度j来衡量,即减速度的变化率da/dt;

式中,a为车辆的纵向减速度;v为车速。
德国相关研究得知[5]:当减速度大于10m/s2时,舒适性很差,因此汽车在制动时候,在保证安全的前提下,减速度需要尽可能地小,在仿真中若减速度大于10m/s2时,就要对控制策略进行优化,为了验证所设计的参数是否符合要求,以前车紧急制动来进行仿真实验,如图9所示,即为仿真搭建的模型结构。

图9 联合仿真回路
4.1 接近紧急制动目标的仿真
设置自车与前车车速均为50km/h,其中自车在原点处,前车位于本车前40m处,前车在某一刻突然紧急制动,进行仿真的图像如图10-13所示。
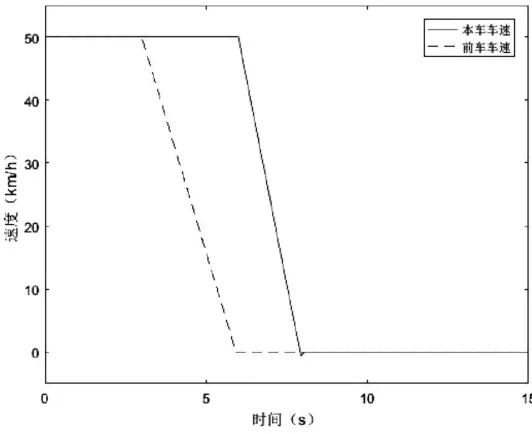
图10 前后车速变化

图11 前后车位移变化

图12 本车加速度变化

图13 前后车距变化
由图10可知,在第3s时前车开始紧急制动,在6s时前车制动停止,由图11可知,前3s两车车距保持恒定,在5.5s时,本车检测到危险开始制动,由图13可知,前后两车最后车距维持在5m。
由图12的本车加速度曲线可知,实际减速度和期望加速度误差较小,且减速度稳定性好。
5 结论
根据接近紧急制动目标的仿真,基于模糊控制的PID控制器能够实现基本的避撞功能。
基于PID控制的控制器在实现避撞的同时系统还具有很好的鲁棒性以及良好的舒适性,使得避撞系统更容易被驾驶员所接受。
