抽油机节能降耗技术应用分析
2021-06-03李奎霖
陈 栋,胡 玲,李奎霖
(延长油田股份有限公司 杏子川采油厂,陕西 延安 717400)
在采油过程中,井液水平逐渐降低。抽油机的一般开采能力大于油井的实际负荷,因此抽油机可能会出现“长轻载”和“空抽”现象[1]。这不仅降低了电动机的功率因数,增加了无效行程的抽油,大量地浪费电能,而且使得抽油设备的损失和维修费用增加。
由于地下采油极为复杂,采油系统是一个非线性系统,具有很强的负荷扰动。建立精确的数学模式是困难的,使用经典控制理论很难满足控制要求[2]。因此,传统方法不能解决抽油机动态工作能力随油井负荷变化而变化的问题,不能更好地达到节能的目的,而且会影响采油量。目前,还没有建立智能控制的理论体系[3],但是神经网络控制、模糊控制、专家系统与遗传算法等已成为公认的智能控制方法,并取得了许多成功的应用。因此,神经网络在自动控制中的应用是自动控制发展的需求。神经网络控制是神经网络和控制理论的结合,成为智能控制领域的前沿课题之一[4]。因此,有效的抽油节能方法是动态控制抽油停止时间,以达到节能的目的。
1 抽油机采油系统能耗分析
抽油机能耗大已经成为采油过程中的主要问题。造成抽油机能耗大的主要原因是抽油机电动机机械特性与油井供液能力不匹配。抽油机电机机械特性运行时不能随着油井工况变化而变化,一般在选择抽油机电机时都按照最大负荷选取,所以造成了“大马拉小车的现象”,导致抽油机电机浪费很多能量[5]。
1.1 抽油机节能影响因素
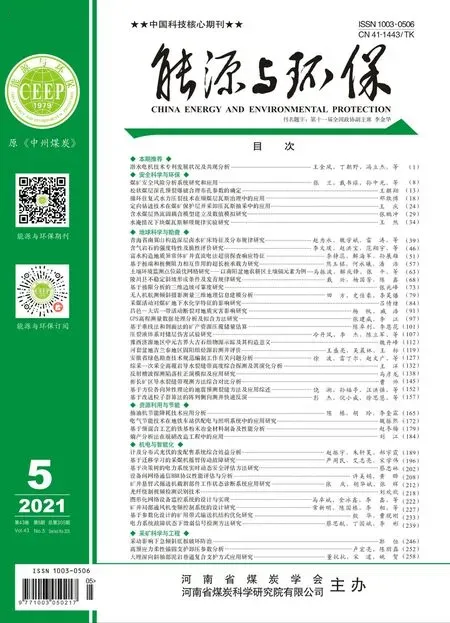
抽油机由地面部分和地下2部分组成,地面装置包括抽油机的动力和平衡,由抽油杆的应变、井液量、抽油机电流组成,抽油泵的单位电压和有功功率。地下部分包括油泵和相应的阀,如图1所示。
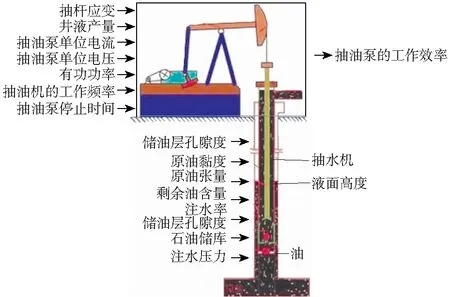
图1 具有影响因素的抽油机Fig.1 Beam-pumping unit with affect factors
抽油机的节能问题是将工作效率提高到最高水平,工作效率表示为输出油(质量)/消耗的电能。工作效率取决于光束泵的工作状态。现在很难控制束泵的行程,因此暂时使行程恒定。束泵的可控工作状态包括2部分:①束泵的停止时间;②束泵的停止时间、光束泵单元的工作频率。抽油机的停机时间和抽油机的工作频率受油井出油速度、油井液位和地下油泵注满水量的影响。
通过测量抽油杆应变、井输出液体量、束泵单位电流、束泵单位电压和有功功率来间接估计泵的满度。直接测量井内产油量也很困难,根据产油现状,发现了影响产油量的8个主要参数[6]:储油层孔隙度、储油层硬度、储层原油残余含量、储油层压力、原油黏度、原油张力、注水压力、注水速率。因此,根据油井的出油率、油井中的液位和地下油泵的注满水量来控制抽油机的工作状态,可以提高抽油机的工作效率,节省泵的电能[7]。
1.2 油泵电机能耗分析
油泵中的电动机运行过程是负载变化的过程。可变转矩负载的性能特征如图2所示。当油泵的质量流量为的额定值fA,并且油泵电动机的转速为n1,阻力为R1曲线,油泵电动机的输出功率可以用APAOfA的平行四边形的面积来表示。在工作点B满电压下运行时,油泵的流量减小到fB,油泵电机的输出功率可表示为BPBofB的平行四边形面积。图中的平行四边形APAofA和BPBofB可以看出油泵中电动机的输出功率P2略有下降。
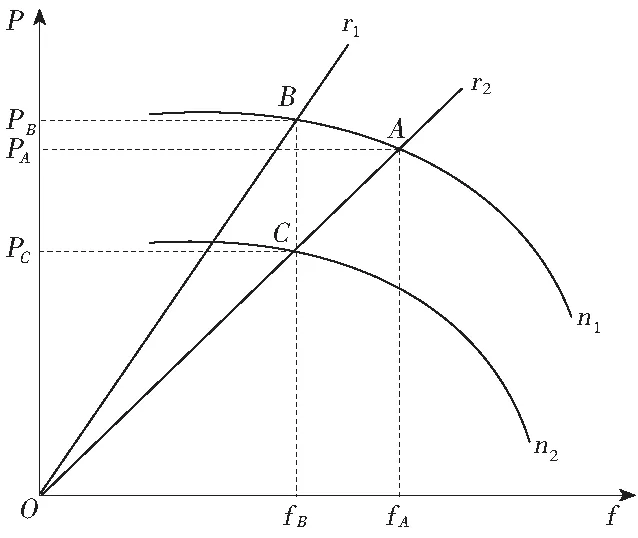
图2 油泵电机的负载特性Fig.2 Load characteristic of motor in oil pump
如果减小负载比,则可以降低电动机的电压,然后将电动机的转速降低到n2,工作点为C。因此,电动机的输出功率表示为平行四边形CPCOfB的面积。平行四边形APAOfA、BPBOfB和CPCOfB表示,当电动机的转速降低到n2时,油泵中电动机的输出功率P2显著降低,其中油泵的流量增大[9]。
2 节能理论
实际状态下是存在最大效率滑差Sη,max的,或者说最优滑差Sη,max是在异步电动机的任何运行状态下都存在的[10]。根据等效电路,可以得到电动机的效率:
(1)
其中,r1为定子电阻;r2为转子电阻;x=x1+x2,为定子和转子的泄漏电抗;s为滑差;gm为励磁电导。
式(1)中dη/ds=0,可得出最佳滑移Sη,max:
Sη,max=
(2)
由式(1)和(2),可以得到
(3)
在式(3)中,ηmax与电动机参数gm、r1、r2、x=x1+x2、Sη,max有关,gm与电力频率w有关。因此,如果电源频率w是不变的,并且将Sη,max保持不变,则电动机将以最大效率运行。如果负载发生变化,可以将转差s调整为Sη,max,以确保电动机以最大效率运行。
根据异步电动机的特性,可以得到滑差方程,即s=(n0-n)/n0。因此,如果频率w不变,则当电动机负载变化时,电动机的转速可以保持在η=ηmax,从而保持s=Sη,max时,电动机将以最大效率运行。不同电压系数下随负载系数变化的效率曲线如图3所示。其中,η=U1/UN是电压系数,β=ML/MN是负载系数。
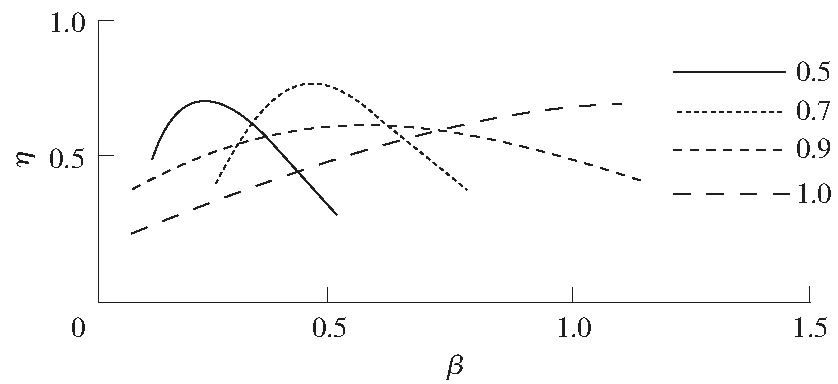
图3 不同负载率下的效率曲线Fig.3 Efficiency curve with different load rate
3 抽油机节能降耗技术
由于油井工况变化导致抽油机的载荷特性变化,从而导致抽油机的载荷特性与电动机的机械特性不匹配,抽油机电动机能耗与其他部分能耗相比,在整个抽油机系统中能耗最大。因此,电动机是提升系统效率潜力最大的部分[11]。
在电动机节能方面,主要围绕在抽油机结构改进、电动机及其控制技术、增设节能装置等方面。开发新型抽油机并替换大量现有型号的可能性很小。难以灵活调节泵单元的结构,也难以普及,并且适用性较弱。节能驾驶设备的使用可以起到一定的节能效果,但负载平衡的效果有限,不能抑制反向发电,节能潜力还没有得到充分挖掘。在不对原抽油机进行结构改动的前提下,增加节能装置可以大大提高电动机的负载率和平衡率,解决了逆向发电的问题,提高了电动机的效率[12]。因此,在传统的抽油机上增加节能装置以提高传统的抽油机的能效,将是未来提高效率的主要手段。
目前有关抽油机节能技术大多数基于神经网络技术,通过获取大量的样本数据,对网络进行训练,得到预测的抽油机状态,根据预测结果确定抽油机合理间抽时间,从而达到节能降耗的目的。
3.1 小波神经网络(Wavelet neural network)
小波神经网络是一种基于小波分析的神经网络模型。用非线性小波基本函数代替了常用的非线性Sigmoid函数,分别用输入比例尺的比例参数和平移参数替换了从输入层到隐藏层的权重和隐藏层的阈值。小波网络的输出是所选小波基的线性叠加,即输出层的输出是线性神经元输出。
(4)
将ψ(t)命名为基本小波或小波生成函数,可以通过缩放和平移ψ(t)来构建一个函数族:

(5)
其中,ψa,b(t)称为小波;a为比例参数,b为平移参数。
信号f(t)∈L2(R)的小波变换定义如下:
(6)
根据小波变换原理,在希尔伯特空间中,选择一个小波生成函数ψ(xt-1,xt-2,…,xt-p),使其满足可接纳条件:
dωxt-1…ωxt-p<+∞
(7)

对ψ(xt-1,xt-2,…,xt-p)进行缩放、平移和旋转变换,可以得到小波基本函数:
(8)
r-θ(xt-1,…,xt-i,xt-j,…,xt-p)=xt-icosθ-
xt-jsinθ,1≤i≤j≤p
(9)
(10)
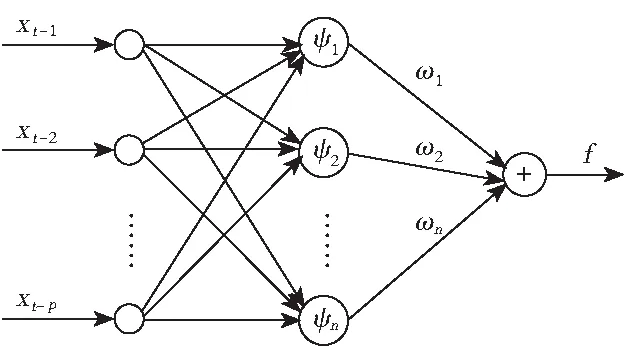
图4 小波神经的结构网络Fig.4 Structure of wavelet neural network
小波基本函数的个数是关键参数,它会影响网络的能力和运行速度。通过分析样本数据的稀疏性,采用减少小波基函数个数的方法。当定义了小波基本函数的数目时,使用基于梯度下降的学习算法来训练网络。采用Morlet小波作为小波神经网络隐层节点的激励函数,

由于小波神经网络同时具有小波分析和神经网络的优点,因此相对于BP网络,它具有更快的收敛速度和更强的逼近能力。基于小波神经网络的抽油机智能节能控制系统可以在很大程度上提高控制精度和控制速度。Jingwen Tian等[13]人通过实验数据对控制系统进行测试,并通过圆形样品的验证方法来验证系统的测试精度。结果表明,该系统可以实时、有效、方便地控制抽油机的节能过程。
3.2 反向传播神经网络神经网络(BP-NN)
(1)BP (Back Propagation)算法是一种通过误差反向传播算法训练的多层前馈网络,是使用最广泛的神经网络模型之一[14]。BP网络可以学习和存储大量的输入输出模型映射关系,分为两个子过程:前向信号传输子过程和错误信号传输子过程,包括输入层、隐藏层和输出层。当将学习样本提供给网络时,神经元的激活值从输入层传输到输出层,并且从输出层中的神经元获得输入响应。然后,根据减小期望输出和实际输出之间的误差的方向,从输出层到中间隐藏层修改连接权重[15]。最后,回到输入层,网络对输入输出模式的响应的精度随着误差逆的传播校正而增加。重复训练数据集中的每个输入输出样本对,直到数据集的误差减小到所需水平为止。BP神经网络具有良好的自组织自学习能力及非线性映射能力,而且具有一定的容错能力,若将其融入抽油节能算法中可以提高系统的效率。BP神经网络的结构如图5所示[16]。
(2)基于BP神经网络的PID控制算法。用神经网络PID控制器代替普通的PID控制器可使系统输出和期望值之间的误差最小。基于BP神经网络的PID控制系统结构如图6所示。
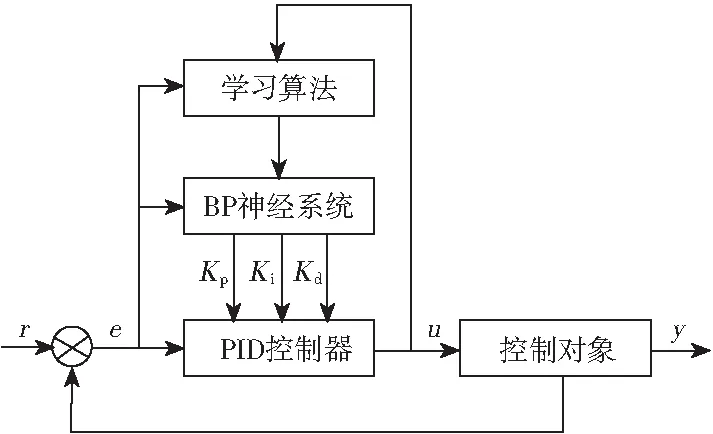
图6 PID控制系统结构Fig.6 PID control system structure
从图6可以看出,控制器由两部分组成,即常规PID控制和神经网络,其中常规PID通过闭环直接控制受控对象,其控制参数Kp、Ki和Kd处于在线调整模式。神经网络是根据系统的运行状态来调整PID控制器的参数,以实现性能优化,使输出神经元的输出与PID控制器的3个可调参数相对应[17]。通过神经网络的自学习和加权系数调整,在一定的最优控制参数下,神经网络的输出将与PID控制器参数相对应。基于BP神经网络的PID控制算法的具体实现如图7所示。
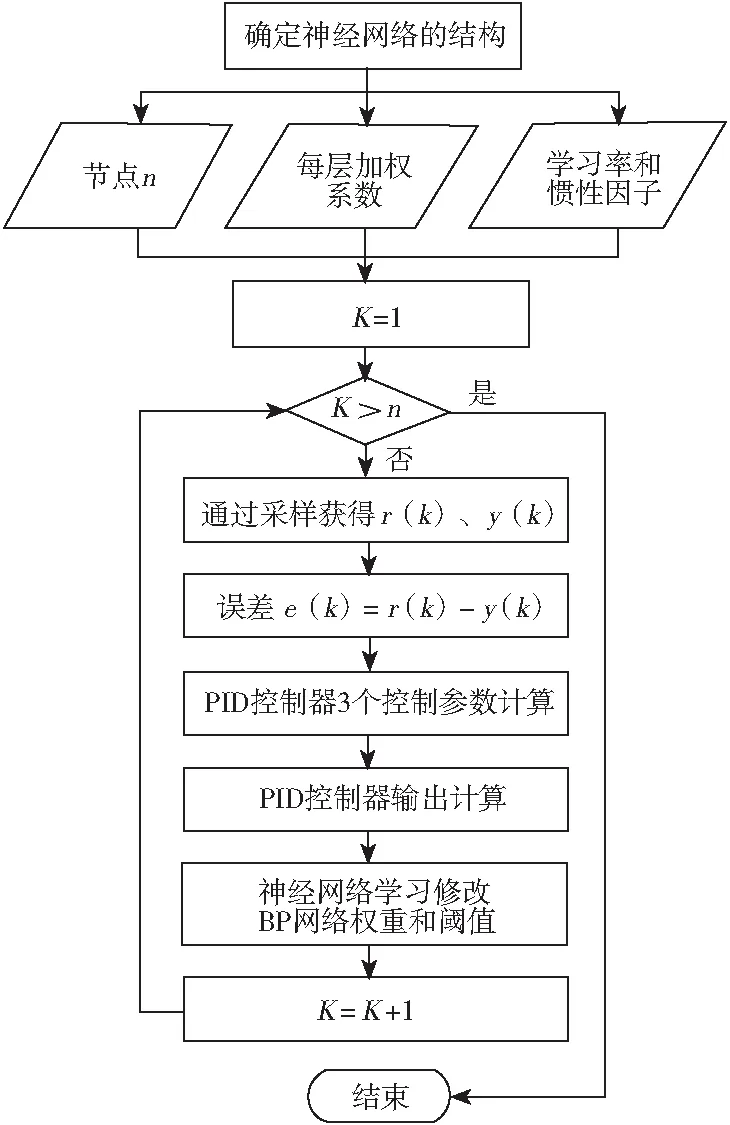
图7 PID控制算法的实现过程Fig.7 PID control algorithm implementation process
BP神经网络是常用的神经网络结构,它可以以任意精度逼近任何非线性函数,具有良好的逼近性能和简单的结构,是一个出色的神经网络。因此,将BP神经网络应用于PID控制具有其独特的优势。
文献[18]介绍了由BP神经网络控制参数的PID控制器用于电机的节能控制,设计了带有BP-NN参数整定的PID控制器来控制油泵中的异步电动机。并通过实验结果表明,当油泵的负荷系数从0.1变为0.6时,平均节能率为21.4%,因此采用调节电压来调节电动机转速的方法是有效的。
3.3 径向基函数神经网络(RBF-NN)
(1)径向基函数。由于其简单的拓扑结构和通用的逼近能力,径向基函数(Radial Basis Function,RBF)神经网络已广泛用于非线性系统建模中。对于RBF网络,可调整的参数是中心、宽度和输出权重。在使用RBF神经网络对动态系统建模时,参数优化是重要的问题[19]。为了拥有合适的参数,有许多用于训练RBF神经网络的在线算法和离线算法。对于离线算法,一些研究人员采用了两阶段的参数优化程序,即对隐藏神经元的中心和宽度进行无监督学习,然后对线性输出权重进行单独的监督学习[20]。RBF过程的原理如图8所示。
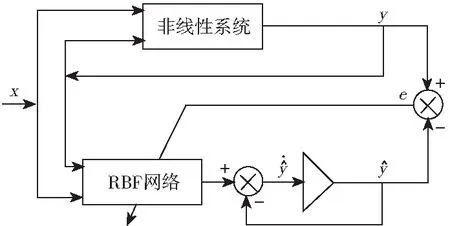
图8 RBF过程的原理Fig.8 Principle of RBF process
通过以下微分方程(多输入和单输出)描述了本摘要中考虑的非线性动力学系统:
(11)
其中,y(t)和x(t)分别为时间t处动力系统的输出和输入。假定函数f(·,·)未知。为了清晰讨论收敛,按以下形式表示(1):
(12)
得:
(13)
可以描述具有K个隐藏层神经元的单输出扩展RBF神经网络。

(14)
式中,y(x)表示扩展RBF神经网络的输出,而g为:
(15)
其中,u=(y(t),x(t))T是网络的输入,W=[w1,w2,…,wk]是接隐藏神经元和输出层之间的权重。θk(u)是第k个隐藏神经元的输出值,并且:

(16)
式中,μk为第k个隐藏神经元中心向量;‖u-μk‖为u与μk之间的欧式距离;σk为第k个隐藏神经元的半径或宽度;θ(y(t),x(t))=[θ1,θ2,...,θk]T,为隐藏神经元的输出矩阵;K为隐藏神经元的数量。
然后需要进行网络训练以优化μ、σ和w,使平方和误差(SSE)最小化。
(17)
并减少RBF神经的建模误差e(t)网络为零。

(18)

(2)基于RBF神经网络的PID控制器。利用神经网络的自学习和自适应能力构成神经网络自适应控制器,它具有结构简单、可以适应环境的优点,具有很强的鲁棒性[21]。基于RBF神经网络设置的PID控制系统结构如图9所示。该方法通过调整网络权重,使控制器参数达到最优,并采用可变学习率来加快网络收敛速度。RBF在线识别网络识别受控对象的在线参数,并根据扭力的变化及时调整控制器的参数[22]。

图9 RBF神经网络设置的PID控制系统Fig.9 PID control system of RBF neural network setting
周以琳等人基于RBF神经网络的在线识别和可变学习率,提出了RBF神经网络PID的自适应控制新方法。实验结果表明,实现了较高的控制性能。该控制方法具有响应速度快、超调量小、鲁棒性强以及适应性强的特点,并且系统具有较好的节能效果。
3.4 模糊神经网络(FNN)
模糊推理系统(Fuzzy inference systems)是由大量简单元件广泛连接而成的、用以模拟人脑行为的复杂网络系统。该系统已经成功应用于各个领域,基于这种多学科的方法,已经发展出了一系列不同的方法和术语[23]。将模糊技术与神经网络进行有机结合,是模糊技术与神经网络深入研究和发展的一种必然趋势。随着模糊信息处理技术和神经网络技术研究的不断深入,将模糊技术与神经网络技术进行有机结合,从而构造出一种可“自动”处理模糊信息的模糊神经网络或自适应模糊系统,已引起越来越多的科技工作者的研究兴趣和关注,成为当前一个重要的研究热点。
模糊神经网络一般结构如图10所示。第1层为输入层,缓存输入信号;第2层为模糊化层,对输入信号进行模糊化;第3层为模糊规则层;第4层为模糊决策层,主要针对满足一定条件的量进行分类并将模糊量去模糊化;第5层为输出层,输出运算结果[24]。

图10 模糊神经网络结构Fig.10 Fuzzy neural network structure
不断对FNN进行改进与优化,并不断地进行训练学习,分析所得结果,修改模型的结构和规则,剔除不合理的参数或成分,确保FNN预报模型和学习算法的有效性。基于FNN预报理论研究的节能控制软件,现已在“智能抽油机节能控制器”中应用[25]。这种节能控制器在几个油田采油厂运行可靠,抽油机自动启停时间合理,在保证采油量稳产的前提下,节电率在30%以上。
另外,国内丁宝等基于油田多数抽油机轻载运行的现状,提出抽油机“间歇启停”运行的节能控制方案,考虑采油为一复杂过程,选择FNN预报方法给予实现。为了实现这一方案,首先,介绍了T-S模糊神经网络的结构,结合抽油过程的特点和研究的需要,对其进行了简化和改进;然后,运用采油现场的样本信息和专家知识对FNN进行训练;最后,给出了实用的抽油机节能FNN预报算法,将该算法应用在智能抽油机控制器中,取得了满意的节能效果。
4 结语
目前陆上油田存在大量的抽油机,且能源利用效率非常低。通过对抽油机系统能耗的主要来源进行分析,可以发现抽油机系统的节能潜力巨大。目前电机效率低、能耗低以及电机设计效率的巨大差异,使电机节能成为抽油机节能最有效、最核心的部分。
在文中分析了小波神经网络、反向传播神经网络、径向基函数神经网络以及模糊神经网络在抽油机节能技术上的应用。利用RBF神经网络的自学习和自适应能力构成神经网络自适应控制器,它具有结构简单、可以适应环境的优点,具有很强的鲁棒性。通过调整网络权重,使控制器参数达到最优,并采用可变学习率来加快网络收敛速度。模糊神经网络的预测结果与传统神经网络方法相比具有较高的预测精度,从而提高了预测准确性。误差反向传播BP网络是近年来的一项新技术,其抗非线性功能的能力已在理论上得到了证明,并在实际应用中得到验证。但是,BP网络存在收敛到局部极小和网络学习速度缓慢等问题。小波神经网络是一种基于小波变换理论和人工神经网络的新型网络,它具有强大的自适应学习能力,并且全局最小解是唯一的。同时,小波神经网络实现过程简单、收敛速度快,被广泛应用于控制、预测等方面。
目前我国石油来源仍是陆上抽油机,且规模非常巨大,在现阶段研究开发具有高可靠性、节能效果优异的抽油机节能装置与技术,具有非常广阔的市场空间和可观的经济效益。