Ka波段云雷达非云回波质量控制及效果评估
2021-06-01曾正茂郑佳锋曾颖婷
曾正茂 郑佳锋 杨 晖 郑 敏 曾颖婷
1)(福建省气象信息中心,福州 350001) 2)(福建省灾害天气重点实验室,福州 350001) 3)(成都信息工程大学大气科学学院高原大气与环境四川省重点实验室,成都 610225) 4)(福建省气象服务中心,福州 350001)
引 言
云的探测对深入理解云-降水物理过程和提高人工影响天气等具有重要意义[1-4]。近年毫米波云雷达发展迅速,逐渐成为云探测的主要设备。毫米波云雷达波长短、灵敏度高、时空分辨率高,能够实时穿透云层,获取十分丰富的宏观和微观信息,目前已被用于许多科学观测试验和气象业务[5-10]。但在实际观测中,毫米波云雷达会接收到一些非云回波,导致资料质量下降,影响资料应用效果[11]。因此,研究非云回波资料质量的改善方法,并评估其对云雨探测的影响,对提高资料质量和资料后续应用至关重要。
目前,毫米波云雷达大多采用垂直向上探测,主要定位于云和弱降水的廓线观测等[12-16]。在雷达性能上,发射器件至关重要,国外大多采用高寿命的电子真空管[17-18],国内主要采用固态器件[19-21]。固态体制雷达的系统稳定性好、观测持续性强,但功率较小,探测距离和灵敏度有限。因此,为了提高雷达性能,通常会设计不同的探测模式,通过多种模式组合的方式最大程度提高雷达整体观测能力[22]。多模式组合采用窄脉冲探测中/低空的云层,宽脉冲探测中/高空的云层;对信号进行脉冲压缩和相干积累等提高灵敏度。宽脉冲可有效提高雷达探测距离和灵敏度,这对高云探测尤其关键,但也带来副作用,如形成虚假气象回波[23-24]。许多观测还表明,毫米波云雷达在中纬度地区经常观测到低空悬浮物回波[25-27]。悬浮物回波是一种非云回波,通常由大颗粒灰霾、粉尘和昆虫等组成,严重时会污染低空的云和降水。针对悬浮物回波的判断和滤除,Luke等[25]研究昆虫引起的雷达功率谱特征,并利用神经网络算法识别昆虫杂波。Görsdorf等[7]根据悬浮物回波整体具有反射率因子Z很弱、退偏振比R很强的特征,以Z<-10 dBZ且R>-20 dB为条件滤除杂波。郑佳锋等[28]统计我国西藏那曲和广东阳江地区的悬浮物回波,发现这类回波具有显著地域性,分别以Z<-15 dBZ且R>-22 dB,Z<-10 dBZ且R>-22 dB为阈值,可以有效滤除两地的悬浮物回波。另外,雷达噪声回波及个别径向干扰杂波也较常见,但整体零散、体量有限,因此一般的滤波方法,如中值滤波、高斯滤波和K领域频数滤波等均可使用[29-30]。
2018年福建省气象局布设了3部Ka波段毫米波云雷达,该雷达以中国气象局十三五规划中加强云观测为目标而研制。本文根据雷达实际性能特点和非云回波特征,针对该型号毫米波云雷达在业务观测中出现的非云回波资料质量问题,提出改进的质量控制方法。在此基础上,利用福建平和雷达观测资料,评估非云回波对低空云-降水探测的影响。
1 资料与设备
本文采用2018年9月—2020年8月福建省平和县(24.4°N,117.3°E,海拔108.5 m)云雷达24 h连续观测的基数据样本(间隔1 h保存1个样本),总样本量为16808。期间因设备升级及故障,存在712个样本缺失,但不影响总体统计效果。
本文所用Ka波段毫米波云雷达是一部多普勒固态体制极化雷达,由中国航空科工集团第23研究所研制。工作时天线垂直朝向,工作频率为35 GHz(对应波长为8.57 mm),波束宽度为0.4°,探测高度范围为0.12~20 km,空间和时间分辨率分别为30 m和1 min。观测资料包括雷达反射率因子Z、径向速度V、谱宽σV、退偏振比R。为同时满足不同云类的探测,雷达设计4种探测模式,包括窄脉冲(0.2 μs)的边界层模式、降水模式和宽脉冲(8 μs,24 μs)的中云模式和高云模式。边界层模式通过相干积累提高灵敏度,主要针对低空弱云探测;降水模式则不采用相干积累保持宽的速度探测范围,但保持信号饱和点处于更高的上限,因此更适合降水的探测。高云模式采用远宽于其他模式的脉冲,可以获得比降水模式高20.79 dB的灵敏度,因此适用于高空卷云等的探测;中云模式介于窄脉冲模式和高云模式之间,适用于中云的探测。此外,边界模式和降水模式还具有更短的雷达盲区,但最大有效探测高度较小;中云模式和高云模式的盲区较大,最大有效探测高度更高。雷达系统和4种模式的主要参数如表1和表2所示。

表1 Ka波段毫米波云雷达主要性能参数

表2 4种探测模式主要参数
2 质量控制方法简介
尽管前人对非云回波引起的资料质量问题开展了许多质量控制研究,但其效果与适用性仍有待提高:一是方法本身与雷达性能息息相关,需根据雷达实际参数对方法进行调整;二是非云回波的出现和分布等特征具有很强地域性,在不同气候背景地区,其变化和雷达回波等特征也表现不同。因此,借鉴前人方法,本文针对非云回波提出改进的质量控制方法。
非云回波滤除:大气层环境的地域差异导致不同地区非云回波的Z和R值差异显著[21],福建平和的非云回波与西藏、广东等地区不同,但以往研究少有采用长时间连续观测数据对云雨回波和非云回波的Z和R进行统计,本文利用2018年9月—2020年8月福建平和的连续观测资料,对云雷达探测的所有低空(3 km高度以下)云雨回波和非云回波进行筛选,为避免筛选误差,云雨回波选择持续时间长的过程,非云回波选择晴天条件下的样本。对云雨回波和非云回波的Z和R进行统计,其概率分布如图1所示。由图1可见,两类回波Z和R分布差异明显,低空云雨回波的Z远大于非云回波,R相反。因此本文借鉴郑佳锋等[28]和Görsdorf等[7]的方法,通过设定Z和R的双阈值滤除非云回波,即将Z<-5 dBZ且R>-22 dB的回波判断为非云回波。统计非云回波的有效回波样本量为1204486,云雨回波的有效样本量为1641076。通过设置双阈值,滤除非云回波的样本量为1131856,其滤除率(滤除非云回波样本量除以非云回波有效样本量)达到93.97%,保留云雨回波的样本量为1632542,其保留率(保留云雨回波样本量除以云雨回波有效样本量)达到99.48%。但考虑到雷达测量的R有效回波点数通常少于Z的有效回波点数,经过双阈值判断并滤除后,还会剩余部分零散的杂波。因此,设定一个N×N的小窗(经过实际测试,本文N取值为5),以小窗中心为判断目标;若小窗中心为有效回波,且窗口内有效回波数量总少于N×N/4,判断为杂波,删除;反之,则认为是正常云雨回波,保留。将小窗遍历所有雷达径向和距离库。
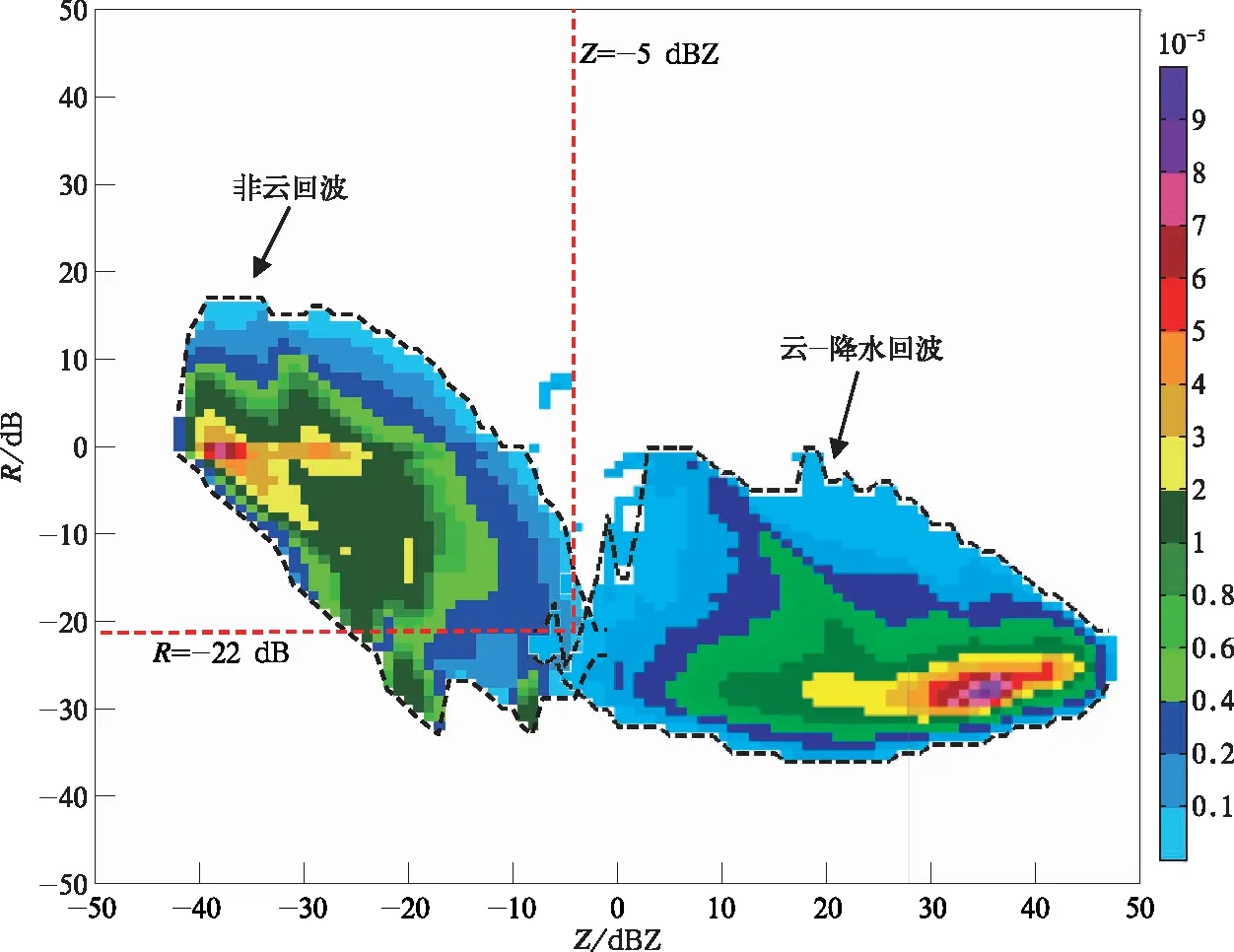
图1 2018年9月—2020年10月福建平和雷达观测的非云回波和云-降水回波Z与R概率分布
3 非云回波对云探测影响评估
3.1 非云回波对低空云-降水探测影响
由非气象目标物造成的非云回波高度通常较低,因此对3 km高度以下非云回波滤除前后的Z和R分别进行统计。观测期间,雷达共探测到26846397和6773902个有效的Z和R回波样本,非云回波滤除前后的Z和R频次分布见图2。对比可见,非云回波对低空弱的云-降水探测的影响较显著。Z<-5 dBZ的雷达回波中,非云回波占样本的67.20%,其中Z=-20 dBZ处频次最多,占该处样本的12.02%。R>-22 dB的雷达回波中,非云回波占雷达回波样本的60.77%,R=-2 dB处频次最多,该处非云回波占样本的79.25%。非云回波滤除后,雷达测量弱回波比例整体下降,Z在总样本中比例下降9.20%,而R分布更加集中,在总样本中比例下降34.05%。

图2 2018年9月—2020年8月福建平和3 km高度以下质量控制前后的Z和R频次分布
非云回波具有明显地域性,其成分与大气边界层环境条件相关[31-32]。为了研究非云回波是否存在随边界层出现日变化,对非云回波的时间-高度的频次分布进行统计(图3)。由图3中时间-高度频次分布可见,非云回波主要分布在0.12~1 km和1.47~2.2 km两个高度层。理论上,随着探测高度升高,雷达的灵敏度随之下降,使得对悬浮物的探测概率也逐渐减小,这与1.47 km高度以下的实际分布相符;但对于1.47 km高度以上,由于雷达切换至宽脉冲的中云模式,灵敏度比低层提升13.5 dB,因此可以探测到较多非云回波。下层非云回波还表现出明显的日变化规律。从整层高度总频次曲线看,非云回波在04:00(北京时,下同)最少,一直到14:00 逐渐增加,在15:00—21:00频次增幅更加明显,21:00—次日04:00频次又逐渐减弱。这种日变化规律与边界层湍流日变化相似,白天湍流受热力和动力作用下,污染物向大气层扩散,而夜间因受大气层结的抑制作用,湍流强度变弱,污染物不易向上扩散[33]。午后湍流活动的加强使得边界层内大颗粒的灰霾和粉尘等颗粒更多并且扩散至更高的高度,造成雷达探测到更多的非云回波。通过普查回波还发现,上层的非云回波大多表现为横线状的特点,这种悬浮物是否为非气象颗粒物亦或由雷达自身缺点引起尚有待研究。

图3 2018年9月—2020年8月福建平和非云回波的时间-高度频次分布和整层高度总频次
3.2 质量控制前后云-降水回波垂直分布差异
为了分析非云回波对云-降水回波垂直分布的影响,对非云回波滤除前后的Z和R分别进行统计。雷达探测的Z和R有效回波样本量分别为63790928和17857538,非云回波滤除前后Z和R的高度-频次分布如图4所示。由图4可知,Z的概率分布在不同探测模式交届高度层出现频次分布不连续,主要受雷达的性能参数(如宽脉冲和相干积累数)影响,4种探测模式中雷达灵敏度高云模式最高,中云模式、边界层模式和降水模式依次降低,因此在雷达灵敏度不同的高度交界处存在不连续。对比可见,在0.12~2.5 km的高度层中Z的频次主要集中在-45~15 dBZ范围,其中-45~5 dBZ最多,占总样本的25.46%,且Z的频次随高度升高逐渐下降。对于R,0.12~4 km高度层出现的频次主要集中在-35~10 dB,5.5~8.5 km 高度层的频次主要集中在-30~20 dB,其中-33~25 dB出现的频次最多,占总样本的2.57%。非云回波滤除后,Z在0.12~2.5 km高度层样本量明显下降,减少的样本量占总样本量的17.68%,而R在0.12~4 km高度层减少的样本量占总样本量的15.29%。

图4 2018年9月—2020年8月福建平和非云回波质量控制前后Z和R的频次-高度分布
4 典型个例验证
根据非云回波伴随的高度低、Z很小和R很大等特征,通过挑选具备这些特征的样本,以3个典型个例对质量控制方法可靠性进行验证。
4.1 典型个例1
图5为2019年4月18日12:00—20:00福建平和雷达上空包含低空碎积云和深对流降水云的回波质量控制前后效果对比图。从质量控制前的Z可见,A位置所在3 km高度以下明显存在一层非云回波,其强度低于-20 dBZ,V和σV也相对较低,且R高于-10 dB,这些非云回波甚至围绕在碎积云附近。在对流卷云砧的B位置和C位置附近存在少量散点回波,这是由于云边界的信噪比刚好达到雷达灵敏度的临界点而被误判为噪声回波。质量控制后,3 km高度以下的非云回波、孤立的散点回波均被有效滤除。
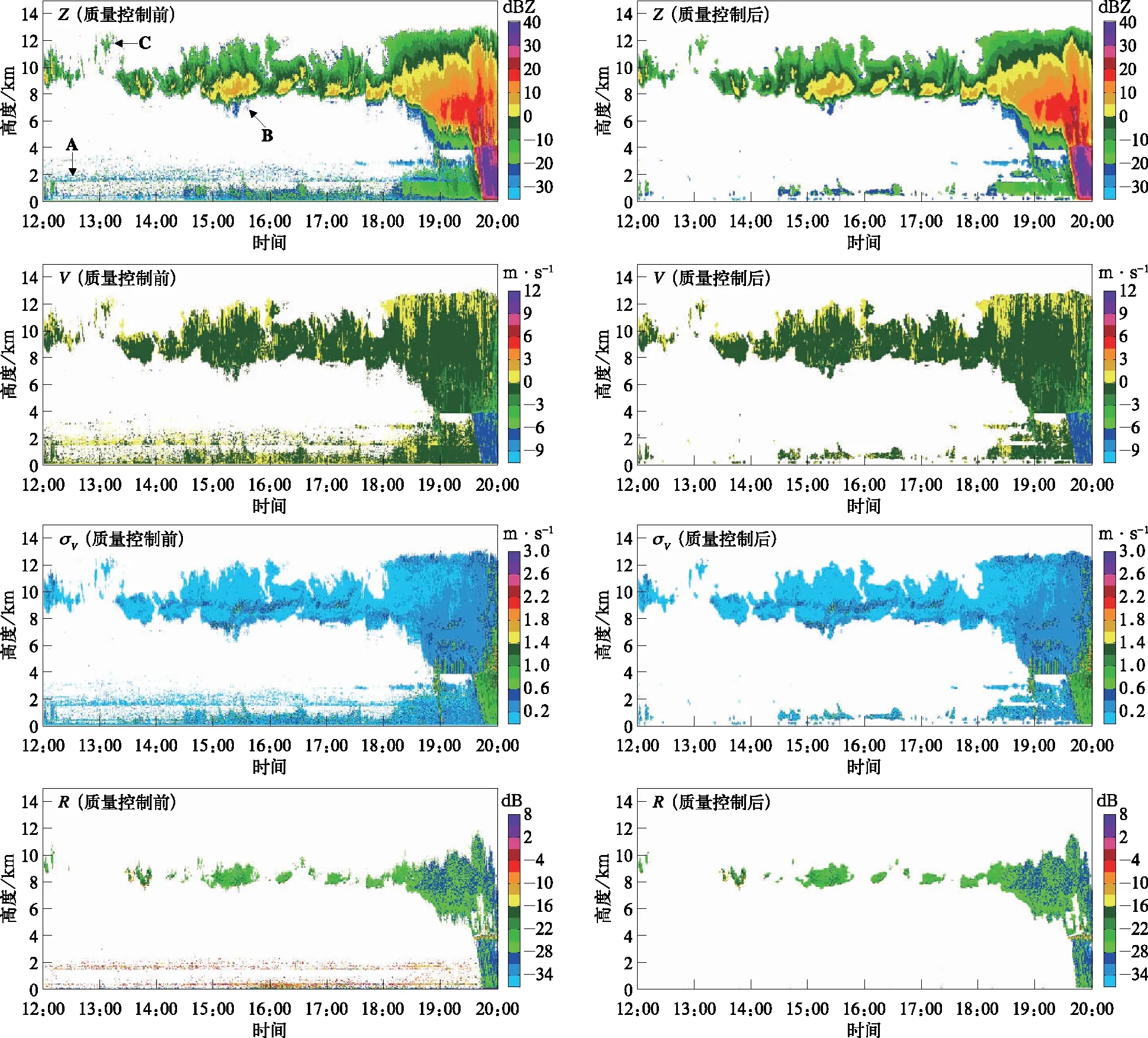
图5 2019年4月18日12:00—20:00福建平和雷达上空观测的包含低空碎积云和深对流降水云的质量控制前后回波对比
4.2 典型个例2
图6为2019年5月19日17:00—23:00雷达上空包含低空层云、积云和高空卷积云的回波质量控制前后效果对比图。由图6可见,低空层云中A位置存在非云回波,其Z也低于-20 dBZ,R高于-10 dB,B位置的孤立噪声回波主要由灰尘和云边界的噪声回波造成。同样,质量控制前1 km高度附近的非云回波V约为0,σV约为0.2 m·s-1,相对较小,表明低层非云回波主要由灰尘等物质组成。质量控制后,低空层云的非云回波和孤立回波均被有效滤除。
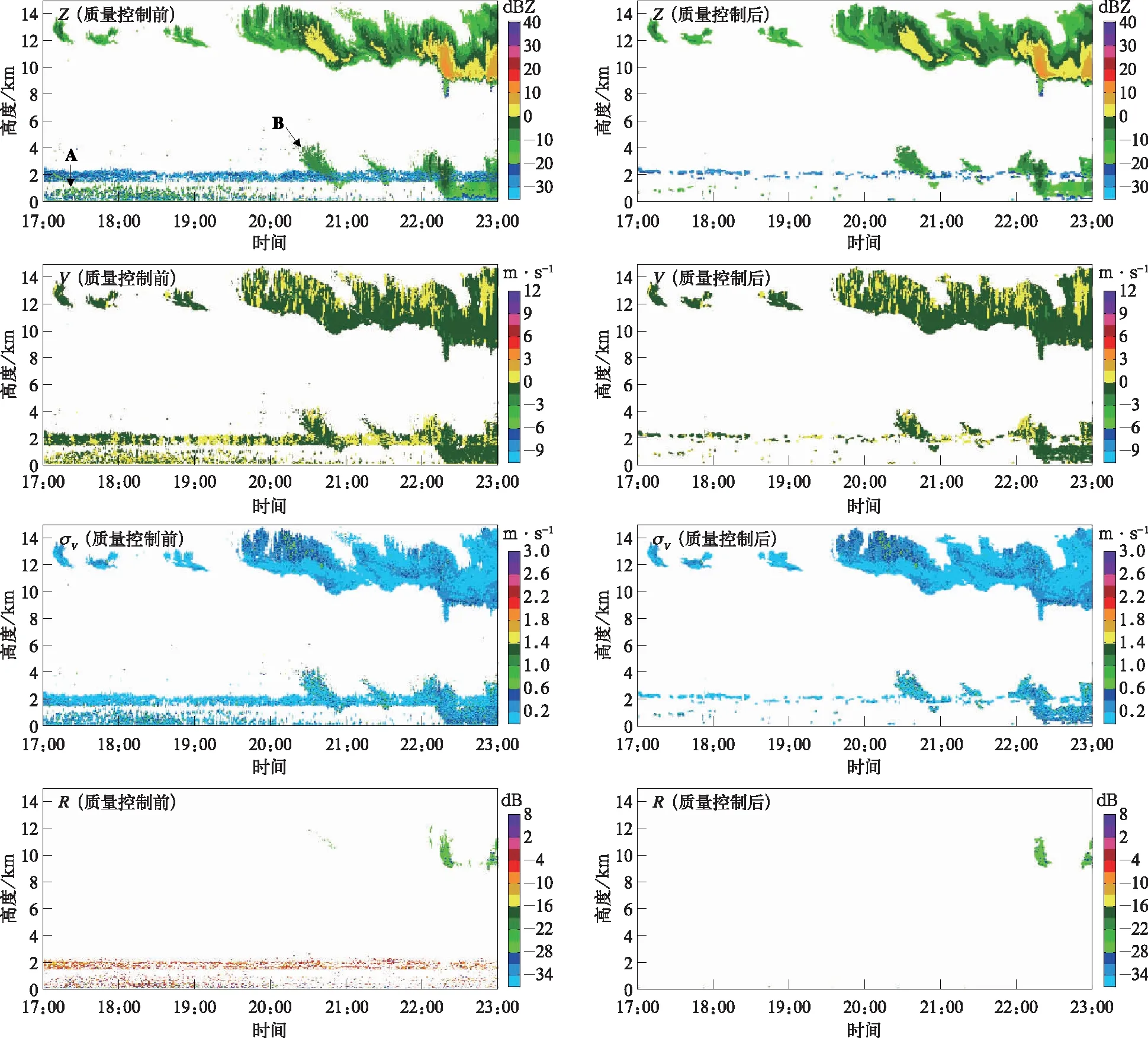
图6 2019年5月19日17:00—23:00福建平和雷达上空观测的包含低空层云、积云和高空卷积云的回波质量控制前后回波对比
4.3 典型个例3
图7为2018年9月2日15:00—23:00雷达上空观测的包含低空积云和弱对流降水云的回波质量控制前后效果对比图。由图7可见,在2 km高度附近A位置同样能观察到明显的散状非云回波,表现为较弱的Z和很强的R,同时,在2 km高度以下非云回波的V和σV均较小,这些杂波在质量控制后也被有效滤除。此外,在积云附近的一些弱信噪比的噪声杂波也被滤除。

图7 2018年9月2日15:00—23:00福建平和雷达上空观测的包含低空积云和弱对流性降水云的质量控制前后回波对比
通过以上3个包含不同类型云的典型个例可以看到,非云回波对云探测资料的可靠性有重要影响,质量控制方法对雷达资料改善明显。
5 结 论
本文利用2018年9月—2020年8月福建平和获取的毫米波云雷达资料,针对毫米波云雷达在业务观测中出现的非云回波资料质量问题,提出改进的质量控制方法,并详细评估对云探测的影响。主要结论如下:
1)福建平和地区的非云回波表现出Z弱、R强的特点,但统计发现它们与青藏高原和广东地区存在差异,以Z<-5 dBZ且R>-22 dB为判断条件,通过滤波辅助,可滤除大部分非云回波。典型个例进行验证表明,质量控制方法对非云回波的滤除效果较好。
2)非云回波对3 km高度以下的云和降水探测影响显著,非云回波滤除后,Z的总样本量下降9.20%,R的总样本量下降34.05%;对低于-5 dBZ的弱回波,非云回波的影响更甚,可占Z总样本量的67.20%。
3)非云回波的探测率与雷达的灵敏度有关,且探测率整体随高度升高而下降。非云回波与边界层有一定关系,存在显著日变化:午后—前半夜湍流活动较强,对应非云回波的探测率也较高,最高出现在17:00;后半夜—日出前湍流活动减弱,对应非云回波的探测率也逐渐下降,最低出现在04:00。
4)非云回波质量控制前后的雷达回波垂直分布的统计结果表明:质量控制后在0.12~2.5 km高度层样本量明显下降,减少了17.68%,R在0.12~4 km高度层减少的样本量比例为15.29%。