轨道交通车辆制动管理方式探讨
2021-06-01吴明赵孙环阳
吴明赵 杨 俊 孙环阳 马 璐
(南京中车浦镇海泰制动设备有限公司, 210084, 南京∥第一作者, 高级工程师)
轨道交通车辆有两种比较常见的制动方式:牵引系统的电制动和制动系统的摩擦制动。其中,摩擦制动又分为空气制动和液压制动两种方式。高铁、动车组和地铁车辆多数采用空气制动方式;新型城市轨道交通车辆,如有轨电车、跨座式单轨和悬挂式单轨车,由于车辆空间限制,绝大多数采用液压制动方式。在实际制动过程中列车一般采用混合制动形式,优先发挥牵引系统的电制动力,如实际电制动力不能满足制动要求时,用摩擦制动进行补充。在混合制动的过程中,需要基于整列车或者特定编组车辆为单位,对制动力进行计算和分配,因此便逐渐形成了制动管理的概念。随着轨道交通技术的发展,列车减速度控制技术、ATO(列车自动运行)模式以及无人驾驶技术的运用,对列车制动控制要求越来越高,要求对制动力的控制更加的精准,因此制动管理水平的高低也直接影响着车辆的性能。
由于高铁列车、动车组以及城市轨道交通车辆运用场景的不同,加上国内各主机厂在具体技术实现方案上存在差异,导致目前国内轨道交通车辆在制动管理主体、电制动和摩擦制动的施加等方面呈现了多种方式。文献[1]仅从响应时间的角度对两种不同制动管理方式进行了对比分析;文献[2-3]分别仅对特定的动车组和地铁车辆中与制动管理相关的信号在各单元之间的传输进行了说明;文献[4-9]侧重于研究和分析电制动和摩擦制动的制动力分配方案。因此,有必要对国内轨道交通车辆不同的制动管理方式进行分析和研究。
1 制动管理概述
制动管理一般基于整列车或者一定编组为单位,由特定的微机控制部件来负责计算总的制动力需求,并向各相关制动执行单元分配制动力。根据轨道交通车辆的实际运用来看,一般由TCMS(列车控制管理系统)的核心部件VCU(车辆控制单元)或者制动系统的EBCU(电子控制单元)来承担列车制动管理的职能。VCU负责列车制动管理时,牵引系统和制动系统不进行制动力计算,仅根据VCU分配的制动力请求,各自施加电制动力和摩擦制动力。当由制动系统的EBCU负责列车制动管理时,VCU不参与制动计算,只负责传输制动级位等相关信息,EBCU负责计算总制动力需求并根据牵引系统反馈的实际电制动力计算,补充施加摩擦制动力。
2 典型制动管理方式
根据制动管理主体的不同以及电制动和摩擦制动的施加方式的差异,可以将轨道交通车辆的制动管理方式归纳为以下几种典型方式。
2.1 方式1:VCU集中式管理
该方式由VCU负责整列车的制动管理,VCU根据制动级位和车辆载荷计算总制动力需求;VCU分别向各车TCU(牵引控制单元)和EBCU请求电制动力和摩擦制动力。TCU和EBCU根据请求力值施加制动力,不负责制动计算。这种制动管理方式在有轨电车和单轨车领域运用比较普遍。比如,国内车辆主机厂从庞巴迪等公司引进的平台有轨电车以及跨座式单轨车均采用该种制动管理方式。VCU集中式管理的典型的网络数据流向如图1所示。
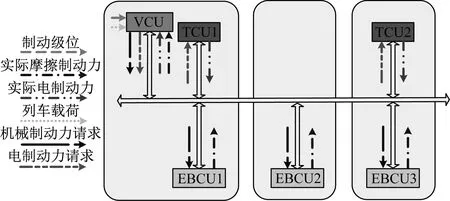
图1 网络数据流向图(方式1)
在“VCU集中式管理”方式下,各相关部件的功能描述如下:
1) VCU功能。汇总各车载荷后计算全列车质量;汇总并判断各车电制动和摩擦制动的可用状态;接收制动级位指令;根据制动指令、车重计算需施加的总制动力;根据电制动和摩擦制动可用情况进行制动力计算和分配;根据制动力分配方案向各车请求电制动力和摩擦制动力;根据各车反馈的实际电制动力和摩擦制动力,对制动力进行二次分配(如需要)。
2) TCU功能。根据VCU的电制动力请求发挥电制动力;向VCU反馈实际电制动力;向VCU反馈电制动可用状态。
3) EBCU功能。根据摩擦制动力请求施加摩擦制动力;反馈实际摩擦制动力;反馈液压制动可用状态。
2.2 方式2:TCU自律+EBCU分布式管理
这种制动管理方式下,TCU根据制动级位和车辆载荷自主计算需施加电制动力;各车EBCU根据制动级位和车辆载荷以及实际电制动力反馈,基于全列车进行制动力管理并计算本车应施加的摩擦制动力。其网络数据流向如图2所示。
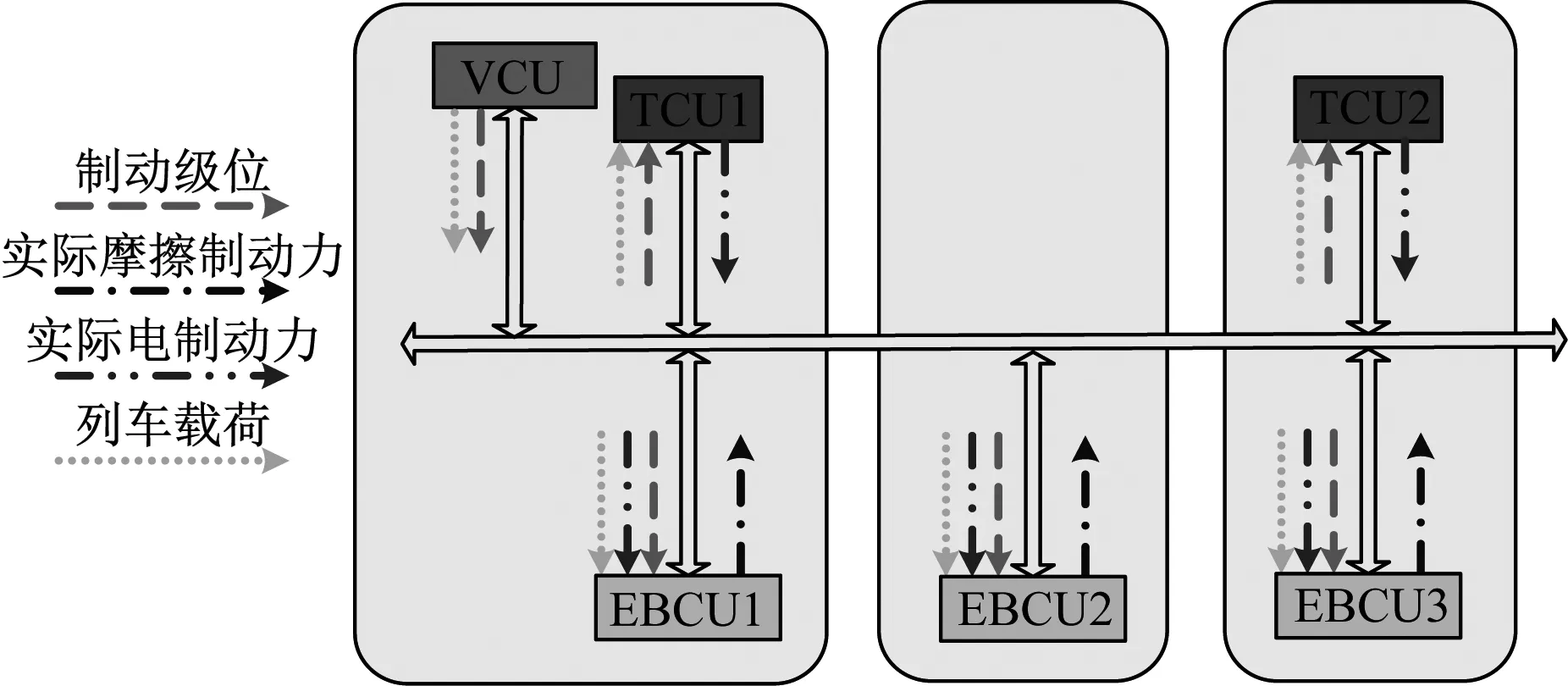
图2 网络数据流向图(方式2)
在“TCU自律+EBCU分布式管理”方式下,各部件具有如下功能:
1) VCU功能。汇总各车载荷后计算全列车质量,并下发各TCU和EBCU;汇总各车电制动和摩擦制动的可用状态,并下发各TCU和EBCU;接收制动级位指令并转发给TCU和EBCU;汇总各车的电制动力和摩擦制动力反馈,并下发各TCU和EBCU。
2) TCU功能。根据VCU的载荷信息和制动级位信息计算所需施加的电制动力,并发挥电制动力;向VCU反馈实际电制动力;向VCU反馈电制动可用状态。
3) EBCU功能。各车EBCU各自根据VCU的载荷信息、制动级位信息计算总制动力需求;各车EBCU根据各车实际电制动力计算总摩擦制动力需求;各车EBCU根据电制动可用状态、摩擦制动可用状态对各车摩擦制动力进行分配;各车EBCU根据分配计算的结果施加摩擦制动力;各车EBCU根据反馈的实际摩擦制动力进行二次分配计算(如需要);向VCU反馈实际摩擦制动力;向VCU反馈摩擦制动可用状态。
2.3 方式3:TCU自律+EBCU集中式管理
TCU根据制动级位和车辆载荷自主计算需施加的电制动力;制动系统设置主、从EBCU;主EBCU基于制动级位和车辆载荷计算全列车所需制动力,主EBCU根据TCU实际反馈电制动力,向各从EBCU请求需补充施加的摩擦制动力,各从EBCU根据主EBCU的请求施加摩擦制动力。其典型网络数据流向如图3所示。
在“TCU自律+EBCU集中式管理”方式下,各部件具有如下功能:
1) VCU功能。汇总各车载荷后计算全列车质量,并下发各TCU和EBCU;汇总各车电制动和摩擦制动的可用状态,并下发;接收制动级位指令并转发给TCU和EBCU;汇总各车的电制动力和摩擦制动力反馈,并下发。
2) TCU功能。根据VCU的载荷信息和制动级位信息计算所需施加的电制动力,并发挥电制动力向EBCU反馈实际电制动力;向EBCU反馈电制动可用状态。
3) EBCU功能。主EBCU根据载荷信息、制动级位信息计算总制动力需求;主EBCU根据各车实际电制动力计算总摩擦制动力需求;主EBCU根据电制动可用状态、摩擦制动可用状态对各车摩擦制动力进行分配;各EBCU根据分配结果施加摩擦制动力;各车EBCU根据反馈的实际摩擦制动力进行二次分配计算(如需要);向VCU反馈实际摩擦制动力;向VCU反馈摩擦制动可用状态。
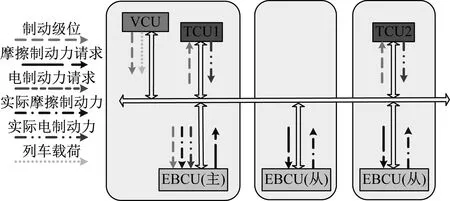
图3 网络数据流向图(方式3)
2.4 方式4:EBCU集中式管理
由EBCU负责整列车制动力管理。制动系统设置主、从EBCU;主EBCU基于制动级位和车辆载荷计算总制动力需求;主EBCU向各TCU请求电制动力,向各从EBCU请求补充施加摩擦制动力,各从EBCU根据主EBCU的请求施加摩擦制动力。其典型网络数据流向如图4所示。
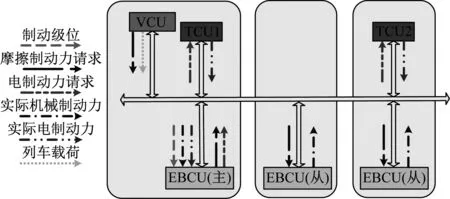
图4 网络数据流向图(方式4)
在“EBCU集中式管理”方式下,各部件具有如下功能:
1) VCU功能。汇总各车载荷后计算全列车质量,并下发各TCU和EBCU;接收制动级位指令并转发给TCU和EBCU。
2) TCU功能。根据主EBCU的电制动力请求发挥电制动力;向主EBCU反馈实际电制动力;向主EBCU反馈电制动可用状态。
3) EBCU功能。主EBCU根据载荷信息、制动级位信息计算总制动力需求;主EBCU根据各车电制动和摩擦制动可用状态(或能力值)对各车电制动和摩擦制动系统进行制动力分配;各EBCU根据分配结果施加摩擦制动力;主EBCU根据反馈的实际电制动力和摩擦制动力进行二次分配(如需要);向VCU反馈实际摩擦制动力;向VCU反馈摩擦制动可用状态。
3 制动管理方式对比分析
3.1 指令传输差异对比
由于牵引系统和制动系统的响应能力属于其固有特性,本文侧重于对不同制动管理方式下的指令在网络传输的差异进行分析。实际上,不同车辆的制动信号传递时间与网络的复杂程度、网络层级数均有关系,这里仅对在同一种网络架构下制动指令接收/处理主体、制动力计算/分配主体以及相应的传输路径进行了分析,具体如下:
方式1:①指令接收/处理【TCMS】→③制动力计算【TCMS】。
方式2:①指令接收/处理【TCMS】→②指令传输【TCMS→TCU/EBCU】→③制动力计算【TCU/EBCU】。
方式3:①指令接收/处理【TCMS】→②指令传输【TCMS→TCU/EBCU】→③制动力计算/分配【TCU/主EBCU】→④需求制动力传输【主EBCU→从EBCU】。
方式4:①指令接收/处理【TCMS】→②指令传输【TCMS→主EBCU】→③制动力计算/分配【主EBCU】→④需求制动力传输【主EBCU→TCU、从EBCU】。
可以看出,方式1和2从指令接收、处理及传输的过程相对较少;方式3在方式1、2的基础上增加了主EBCU分配制动力至从EBCU的过程;方式4再增加主EBCU处理和分配制动力至各TCU的过程。
3.2 网络控制复杂度对比
在VCU集中式管理方式下,网络系统集成了制动管理功能,牵引和制动系统分别只负责电制动和摩擦制动力的施加控制,牵引与制动系统之间直接交互的信息较少。另外,各车制动系统接口也相对独立。该方式不适用于车辆网络功能和制动管理功能比较复杂的车辆,否则,可能将影响系统之间通信的实时性。
如果对车辆制动系统有比较复杂的制动管理和功能要求时(如高速动车组设置了列车级/网段级/单元级制动管理单元、车上制动试验等),EBCU集中式管理这种方式将突显其优势。但是,EBCU集中式管理除了在总线上要传输相关状态量之外,还需要传输重要的控制指令信号,因此对通信总线的可靠性要求更高。很多地铁车辆上甚至使用了制动专网,以保证制动管理功能的可靠。另外,在该种方式下,牵引系统只根据EBCU分配施加电制动力,不负责制动力计算,与牵引系统耦合度高。随着专业化程度的加深,由EBCU负责制动管理也逐渐成为一种趋势。
在EBCU分布式管理方式下,网络只传输相关的状态信号,基本无控制信号,管理方式相对集中,对网络系统可靠性要求偏低。
3.3 制动控制统一性及精确度对比
在TCU自律的制动管理方式下,各TCU单元分别自主计算并施加电制动力。对于基于“优先发挥电制动,不足部分由摩擦制动补足”原则设计的车辆,电制动和摩擦制动接口相对比较简单。但是需牵引和制动系统按照约定的规则执行完成电制动和摩擦制动的匹配。而在TCMS集中式管理和EBCU集中式管理方式下,全列车统一由TCMS或主EBCU进行制动力的计算和分配,控制主体唯一,因此在控制的统一性以及精确度方面相对具有一定的优势。
综上,各种制动管理方式优缺点对比如表1所示。
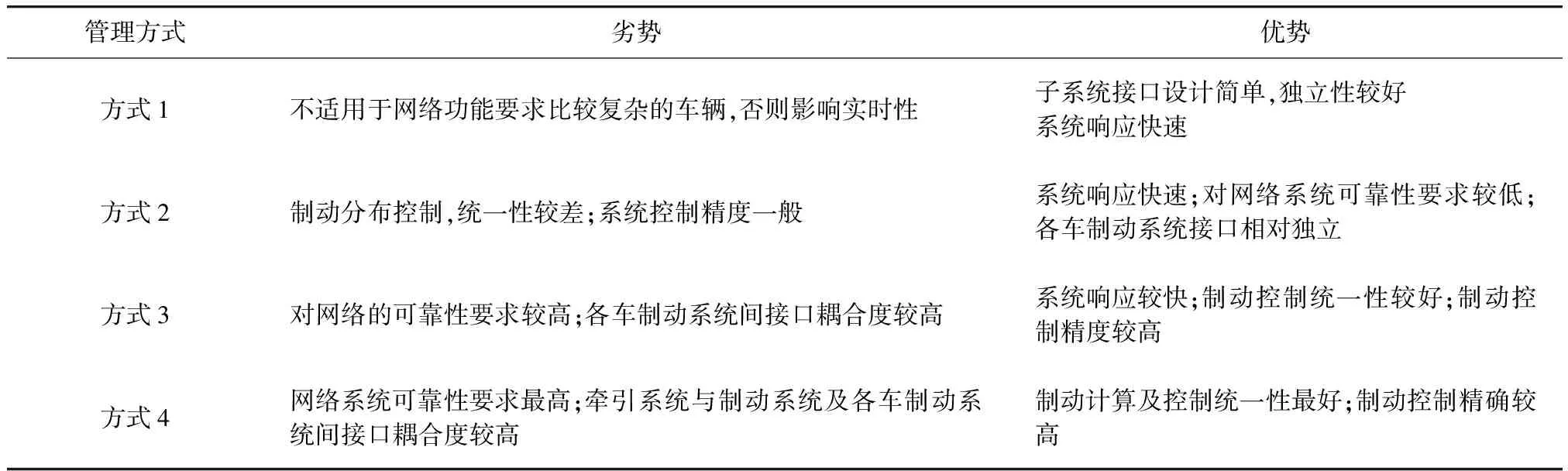
表1 各种制动管理方式优劣势对比表
4 运用建议
不同类型的轨道交通车辆在运用特点、技术要求以及制造成本等方面均有一定的差异。比如:动车组、高铁列车由于运行速度较高,车辆功能相对复杂,对制动系统的安全性和可靠性要求更高,因此一般采用EBCU集中式管理更为合适;对于城市轨道交通车辆,由于站间距较短,对制动系统的快速响应的要求较高,并且由于站台设置屏蔽门,对制动停车精度要求较高,采用TCU自律+EBCU集中式管理的方式比较合适;另外,城市轨道交通车辆作为公共交通的一种重要方式,也需要在设计时把成本因素的限制作为一个重要考虑因素,可以灵活采用EBCU分布式管理或VCU集中式管理。
因此,针对国内高铁列车、动车组及各种城市轨道交通的车辆类型,结合其运用特点,针对性地给出了不同制动管理方式的建议,如表2所示。
5 结语
通过上述分析,不同制动管理方式在数据传输、网络控制复杂度和控制统一性等方面存在一定的差异,针对不同类型的轨道交通车辆制式和运用场景,选用适合的制动管理方式,可以有利于更好地发挥制动效果,提升车辆性能。本文在对4种制动管理方式的优劣势进行对比分析的基础上,针对高铁列车、动车组以及城市轨道交通车辆,给出了相应的制动管理方式的建议,对实际工程运用具有一定的参考意义。
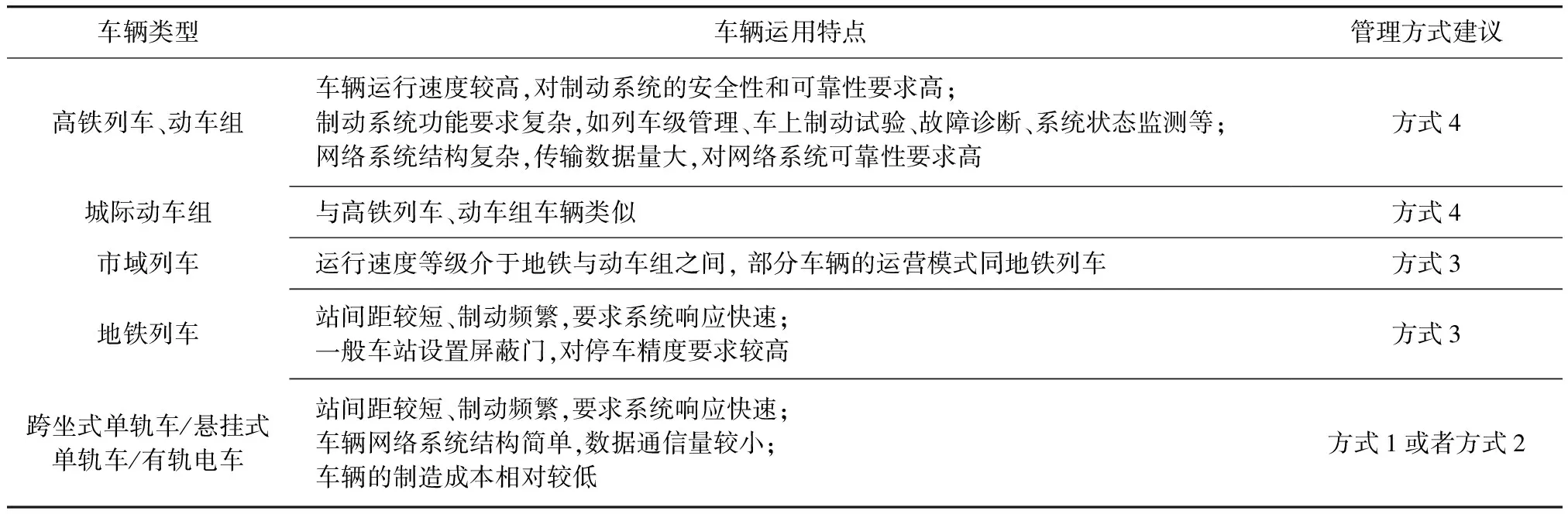
表2 制动管理方式建议表
