碟式太阳能自动跟踪系统的设计与研究*
2021-06-01刘贤群蒋逢灵
刘贤群,蒋逢灵
(湖南铁路科技职业技术学院,湖南 株洲 412006)
0 引言
不可再生能源对工业发展具有重要的作用,但是面临消耗殆尽及造成环境严重污染,为了人类的发展与生存,各个国家非常重视新能源的开发与利用。太阳能作为新型能源,具有低碳、环保、清洁、可再生的特点,深受工程应用的青睐,作为重点新能源开发之一[1-2]。碟式太阳能热发电系统作为太阳能新能源的重要装置,承担着太阳能的搜集、能源的转换和点集热发电效应,是目前世界上使用太阳能装置转换效率最高的装置[3],因此,为了保证碟式太阳能热发电系统的高效率运行,需要更高精度的跟踪控制系统。本文设计了一款太阳能混合式双轴跟踪控制系统,以PLC为核心控制器,最大限度地提高碟式太阳能热发电装置的跟踪效率,提高太阳能的使用效率,确保太阳能发电装置核心部件聚光器的全天候实时自动跟踪,极大地提高了对太阳光的接受率。
1 混合式双轴自动跟踪系统的设计
混合式双轴自动跟踪控制系统主要有核心控制器PLC、传感器、AD转换模块及人机界面等组成。
第一种工作模式多云或阴天时,自动跟踪系统以视日运动轨迹进行工作[4],PLC从GPS模块中读取当地的时间和经纬度,以此来计算实时太阳的方位角和高度角的理论值,PLC 控制单元通过碟式太阳能聚光器的当前姿态与理论值的误差,计算出PLC 控制单元发出的脉冲数。根据脉冲数量的大小发送相应的脉冲信号控制伺服电机的转动,精确控制方位角电机和高度角电机的工作,从而调整碟式太阳能聚光器的当前姿态使其垂直对准太阳光。
第二种工作模式为晴朗天气时则采用光电跟踪方式[5],这种系统根据太阳光照射到光电检测模块上,把太阳光信号通过AD转换模块转换为数字信号,通过控制器实现太阳能的自动跟踪控制。同理,控制器根据脉冲数量的大小发送相应的脉冲信号控制伺服电机的转动,精确控制方位角电机和高度角电机的工作,保障碟式太阳能聚光器能实时对准太阳光。
跟踪控制系统在工作的过程中通过人机界面实时显现当前太阳的高度角和方位角,便于实时观察系统的工作状态。同时为了确保系统的稳定性,还增加了风速传感器用于检测风速,当风速大于一定的设定值,PLC发出指令控制聚光器放平,防止风速过大而使装置损坏。
1.1 碟式太阳能双轴驱动系统
碟式太阳能热发电系统采用立柱式主支撑+“Z”字形网架—悬臂桁架结构,主要由聚光器、接收器、双轴跟踪机构和固定支撑四个部分,其双轴跟踪系统是系统的核心部分,最为重要的组成主要有两部分,方位角调节机构和高度角调节机构,分别由两个伺服电机驱动控制。如图1所示。
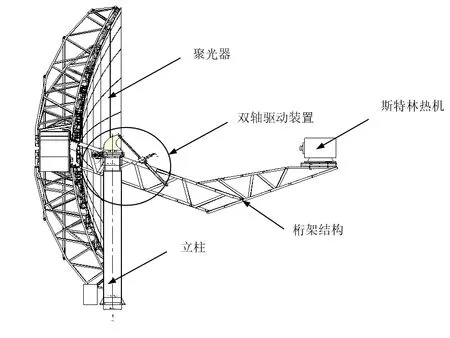
图1 碟式太阳能热发电系统结构图
方位角驱动电机为交流伺服电机,太阳能集热器装置通过行星齿轮减速器、一级涡轮蜗杆减速器驱动做旋转中心运动,减速器的总传动比为1∶93 600。俯仰角的调节则是通过减速器带动丝杆的运动实现俯仰角的控制,减速器总传动比为1∶512。系统正常工作过程中,双轴驱动装置主要工作任务就是跟踪太阳的运动轨迹而运动,通过方位轴转动控制方位角,绕高度轴作俯仰运动控制系统的高度角,确保太阳光的光线垂直照射到太阳能装置的聚光器上。
1.2 视日运动轨迹跟踪原理
根据天文学运动规律计算当地某一时刻太阳的具体位置作为视日运动轨迹的跟踪方式,而系统中使用的高度角和方位角就可以确定太阳位置。如图2所示为地平坐标系,图中h为高度角,β为方位角。
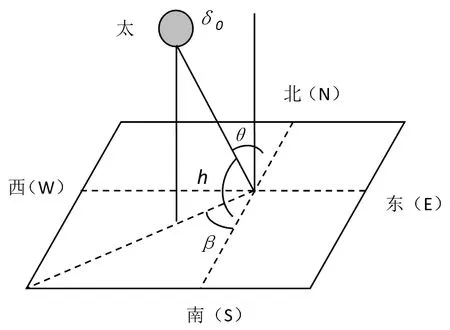
图2 地平坐标系
1.2.1 高度角的计算
太阳高度角是指太阳照射光线与地平面之间的夹角,变化范围为0°~90°。计算公式:

式中,φ为当地的纬度,δ为当地赤纬,ω为时角。
1.2.2 方位角的计算
太阳方位角是指太阳照射光线在地面上的投影与正南线的夹角,变化范围为-90°~90°,正南以西为正值,正南以东为负值。计算公式如下:

1.3 光电跟踪原理
自动跟踪系统设计了以四象限光电探测器为核心元件的光电检测模块。系统进行光电跟踪时,首先由分布在东、南、西、北的4 个光敏电阻进行跟踪,输出的电流信号经过AD 转为数字信号[6]。当4 个光敏电阻输出信号不一致时,通过东、西方向的输出电压差用来调节太阳方位角的变化,南、北方向的输出电压差用于调节太阳能高度角的变化。然后再由放置在中间的四象限光电探测器进行精跟踪,太阳光线通过透光罩经光学系统在遮光筒底部的四象限光电探测器上形成光斑,这时光电探测器的四个象限分别会对外输出微弱的电流信号I1、I2、I3、I4。通过AD 转换模块转换的数字信号为U1、U2、U3、U4。假设光斑在四象限光电探测器X轴和Y轴上的偏移量分别为△X和△为常数,其中R为光斑的半径)[7],则有:
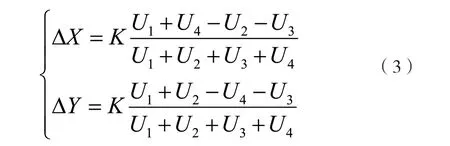
式(3)中偏移量△X和△Y决定太阳方位角和高度角的偏移方向。当偏移量△X>0时,太阳在方位角方向上向东偏移,反之则向西偏移;当偏移量△Y>0 时,太阳在高度角方向上向南偏移,反之则向北偏移。通过判断△X、△Y的幅值和正负,使装置的聚光器跟踪太阳位置的变化。
2 实验验证结果
当为晴天时采用光电跟踪模式,先由光敏电阻进行粗跟踪,然后由四象限光电探测器进行精跟踪,从而使聚光器实时跟踪太阳光;阴雨天气时采用视日运动轨迹跟踪模式,通过GPS 获取当地的经纬度以及时间信息,计算出当前时刻太阳的方位角和高度角,根据方位角和高度角驱动伺服电机运转,从而带动聚光器追踪太阳光。为了消除视日运动轨迹跟踪的累计误差,在聚光器上安装了姿态传感器,当误差大于2°时,立即驱动伺服电动机转动减小误差值。
以湘电集团开发的25 kW 碟式太阳能热发电装置为实验载体,实验地点:湘潭(东经112°,北纬28°);实验时间:2020 年6 月21 日(夏至)和2020 年9 月22 日(秋分)的7:00—19:00,夏至日天气:晴天,秋分日天气:阴天;实验时,每间隔30 min记录一次实验数据,并将测试的方位角和高度角数据与天文算法计算出的方位角和高度角理论数据进行对比,夏至日方位角和高度角实验数据与天文数据对比曲线以及角度误差分析曲线如图3所示,秋分日方位角和高度角实验数据与天文数据对比曲线以及角度误差分析曲线如图4所示。
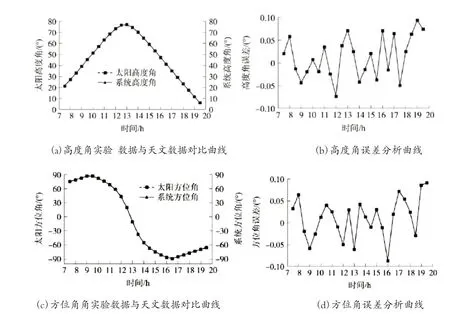
图3 夏至日实验数据与天文数据对比曲线及角度误差曲线
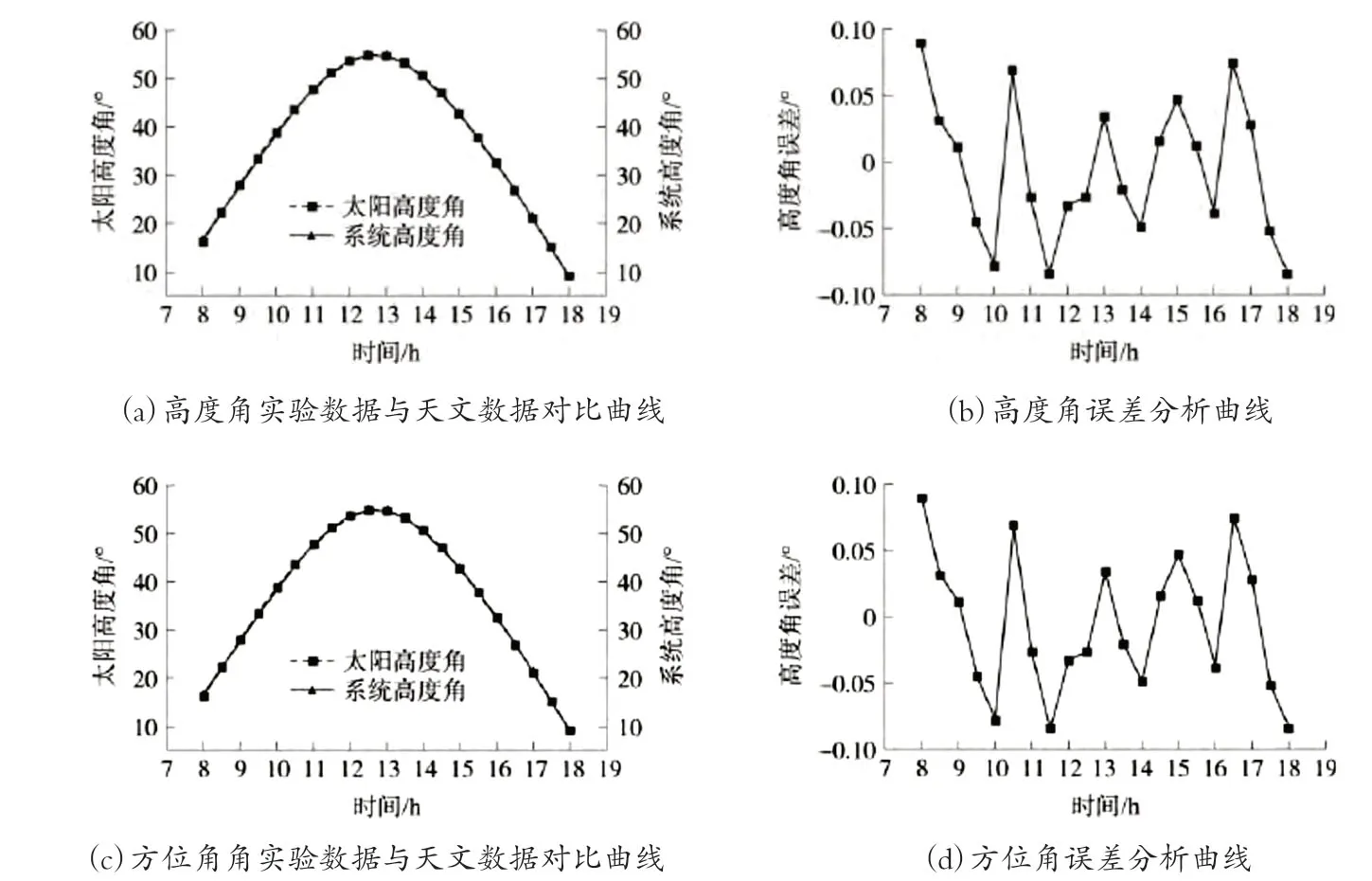
图4 秋分日实验数据与天文数据对比曲线及角度误差曲线
通过实验数据与天文数据对比曲线和误差曲线分析,得出如下实验结论:高度角和方位角的实验数据与天文数据的最大误差为±0.1°,通过实验数据对比说明本跟踪控制系统很大程度上提高了碟式太阳能热发电装置跟踪太阳光的精度。
3 结束语
本设计提出了一种以PLC 为控制核心的高精度跟踪控制系统,将视日运动轨迹跟踪和光电跟踪相结合。阴雨天采用视日运动轨迹跟踪,利用姿态传感器可以将姿态反馈给控制器构成闭环控制,从而消除累计误差。晴天采用光电跟踪,通过设计精粗结合的光电检测模块,大大提高了跟踪精确度。
