电子稳定系统控制下的车辆仿真研究
2021-06-01熊艳飞梁烔墙
熊艳飞,梁烔墙
(江西应用科技学院智能制造工程学院,江西 南昌 330100)
在车辆中增加车身稳定控制系统,可提升行车的安全稳定性。ESP系统能防止汽车操纵失控,主要是根据路面状态以及汽车运动的状态来进行判断,从而控制车辆的行驶安全。ESP 系统目的是保持车辆稳定,一旦发生紧急情况,能有效确保车辆的安全。为验证ESP 技术作为车辆的某个特征变化效率,在需要测试的车辆上,安装ESP系统。一般是在汽车负载条件不同的情况下,使安装了电子稳定控制系统的智能汽车模型在稳定的范围内变化,并能够根据控制器增益及汽车模型的变化而变化。本文主要讨论宽度裂分的中心和重力高度两个方面,同时比较安装了ESP 和没有安装ESP的车辆在安全行驶方面的效果。
1 汽车仿真
在 MATLAB 仿真下[1-3],主要利用平摇动力和滚动动力进行4 自由度模型进行仿真。纵摇动力能够忽略不计的原因是纵向加速度比较小。
1.1 汽车ESP系统的结构
为得到ESP控制系统,需要具备牵引力控制、电子制动力分配、电子制动防抱死制动系统以及有效控制车身稳定的系统和设备。电子控制单元ECU、传感器和执行器是具有ESP系统的汽车必须具备的组成部分。
电机、回程泵、储能器、进出口阀、隔离阀和后启动阀是液压调节器总成的主要组成部分。ESP 系统结构图[4]如图1所示。ECU的执行者为液压调节器,控制车身稳定的策略由ECU 下达,各方面的性能也是由ECU 调节的,在达到最迅速的制动情况下,保证安全。液压控制单元的4个通道彼此独立,一个通道发生故障,并不会影响制动效果。ECU需要动作时,液压调节器总成在调节液压力的推动下来控制每个车轮的车速,协调完成车身稳定。
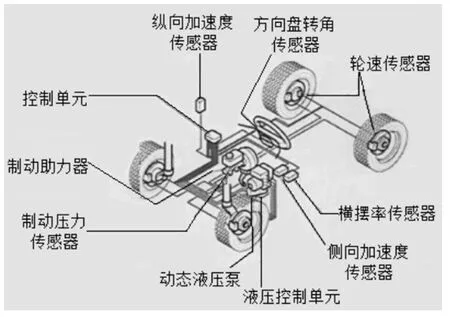
图1 ESP 系统结构图
1.2 汽车ESP系统的工作原理
ABS、ESD 和TCS 等所具有的功能,汽车车身稳定控制系统都有,为提升车身的稳定性能,还添加了各种传感器,能够自动维持稳定和平衡,因此在ESP系统控制下的,汽车行驶安全得到提高,而相应的交通事故发生概率变小[5]。
在ESP 系统控制下,车辆的实时状态能够被准确地监测,ECU 通过接收横向偏摆率传感器、方向盘转角传感器和前后轮速度传感器采集的信号,并分析这些信号,比较与预先存储的参考信号之间的差别,通过对不同环境下车身的偏离情况进行判断,将调整好的策略传递给液压调节器。要实现对车轮的控制,还需要液压调节器调节液压力,为保证车身不侧翻而使车辆立即停止。在比较紧急的情况下,为降低人为失误,装置了ESP系统的汽车能够自动反应。
ESP 系统具有实时监控和具有主动干预的功能,通过判断当前汽车的实时状态,一旦汽车出现危险,系统会及时做出制动策略,使得汽车安全停止。ESP 系统主要通过控制汽车的制动力和驱动力,调节车身的平衡,维持稳定。具有事先提醒的功能:面对行车过程中的突发危险,若不是特别紧急,ESP系统能够事先发出警报,提醒车主。车主在收到警报信息后,立刻减速,调整汽车的稳定性,预防事故的发生。
1.3 在ADAMS/Car中建立汽车整车模型
利用ADAMS/Car 模块[6-7]建立国产型商用车的整车模型,其中每一个子系统模型都需要建立。车架和车轮之间所出现的传力连接装置就是悬挂系统,主要是通过传递两者之间的力,使得因路面不平给车身带来的冲击力得到缓解。想要保持或改变汽车行驶方向的装置,就需要转向系统根据驾驶员的想法来控制汽车如何行驶。制动系统是能够对汽车进行一定程度的强制制动的装置,通过路面对车轮施加一定的力,可以使行驶的车辆有效地进行减速或停车,也可以使静止的车辆平衡地停在不同路面状况下。通过发动机对外输出动力,它作为汽车的能量转换机构。
1.4 汽车ESP控制系统分析
根据汽车数学模型能够得到理想值,而汽车中的传感器能收集到实际行驶值,通过比较,ESP系统能够判断出汽车的行驶状态,一旦出现不稳定的状况,能及时控制汽车行驶轨迹。横摆角速度和质心侧偏角的实际值与理想值之间,会因为侧向力的实际值与理想值出现偏差而存在偏差,如果偏差值在允许范围内,汽车行驶可近似看作为稳定的;一旦超过允许范围,应及时采取措施,以控制汽车的行驶。汽车是否处于理想轨迹,ESP系统是通过横摆角速度参数来进行判断的,而汽车行驶状态是否处于稳定,ESP系统是通过质心侧偏角参数来进行判断的。
汽车行驶过程中可能会出现转向不足或转向过度的情况。如果汽车转向不足,通过ESP系统来下达控制命令,在弯道内侧,对后轮施加瞬时制动力的目的是为了降低汽车车轮的侧向力,并使得纵向制动力增大,根据横摆力矩方向的一致性使汽车从转向不足到转向中性进行变化,从而使汽车稳定行驶。如果汽车过度转向,通过ESP 系统来下达控制命令,在弯道外侧,对车轮施加瞬时制动力的目的是使行驶速度及车轮的侧向力降低,通过反向的横摆力矩来使汽车稳定行驶。
1.5 ESP仿真模块的建立
作为4自由度的系统,通过4个独立变量来确定系统状态。其中横摆角速度和质心侧偏角是汽车车辆稳定性的最重要的参数,故作为变量。汽车的理想横摆角速度和理想质心侧偏角,是根据汽车4自由度数学模型的运动方程来进行计算。在ADAMS/Car 模块中,建立车辆的整车模型,车辆整车模型如图2所示。
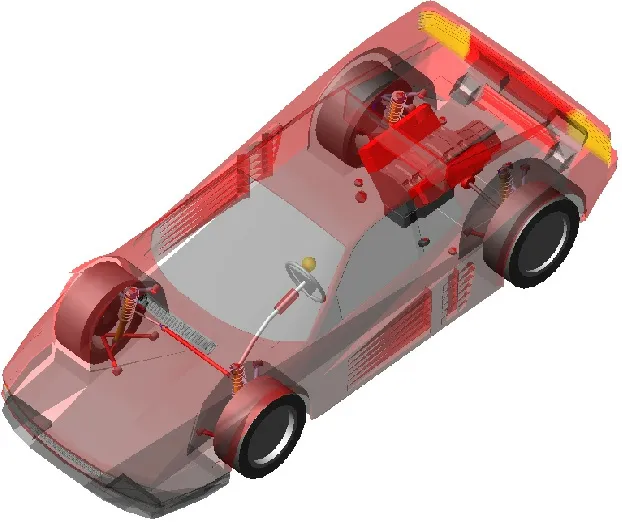
图2 车辆整车模型
根据整车模型得到实际的横摆角速度和质心侧偏角。控制系统的输入是通过对实际值和理想值作比较而得到的偏差值。如果以前轮转角作为输入,则可认为汽车的车厢只作平行于地面的平面运动,认为侧向力与其相应的侧偏角成线性关系,对汽车的运动方程进行拉普拉斯变换,建立车辆的数学模型。ESP仿真模块的建立主要分为以下五个步骤:
1)将建立的国产商用车子系统模型和整车模型导入到ADAMS环境中,并加载ADAMS/Controls模块。
2)确定输入变量和输出变量。
3)导出整车模型。ADAMS/Controls保存输入信息和输出信息在carmodel.m文件中,生成在carmodel.cmd命令文件和 carmodel.adm数据文件。
4)将文件导入到MATLAB 指定的工作目录下,在MATLAB软件中调取ADAMS/Car子系统模型文件。在命令窗口下输入carmodel 文件名,MATLAB 会自动读取ADAMS所设置的输入与输出变量。在MATLAB 软件系统中会显示ADAMS软件所定义的所有输入变量和输出变量。
5)建立控制系统模型。仿真控制系统模型如图3所示。设置好仿真参数之后,在MATLAB 中调用仿真控制系统模型,并联合adams_sys控制模块对该型商用车整体模型进行仿真。
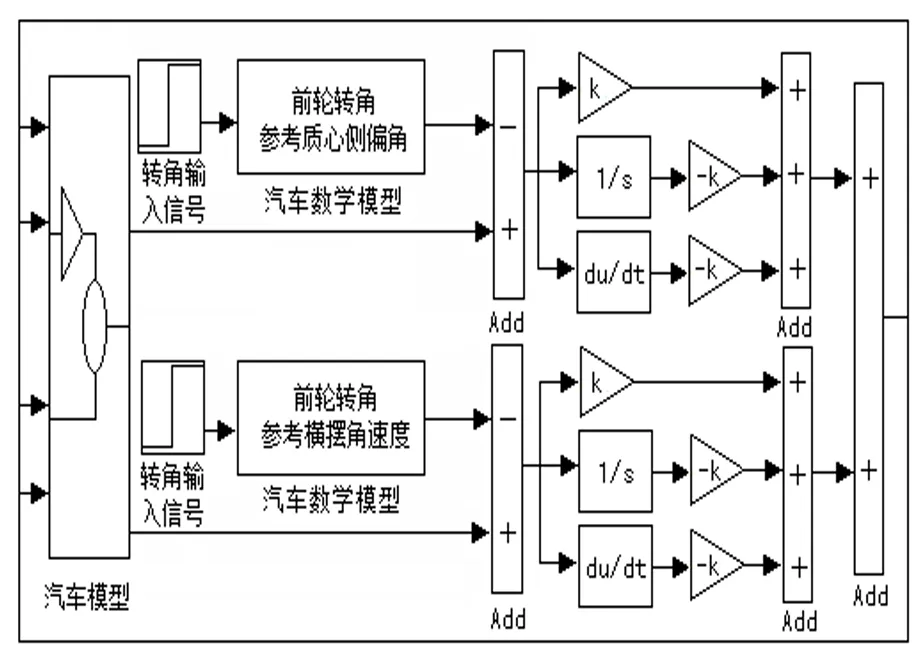
图3 仿真控制系统模型
2 结论
ESP 系统在汽车行驶稳定性上具有至关重要的作用,带有ESP系统的汽车,特别是在人为失误情况下,出现转向过度或转向不足时,更能有效体现它的价值,能降低汽车甩尾或侧滑的概率,从而使汽车的行驶安全及行驶的稳定得到充分的保证。通过虚拟仿真,没有ESP系统控制的汽车,一旦出现汽车行驶不稳定情况时,难以及时得到改善;而含有ESP系统控制的汽车能够近似认为在理想轨迹下行驶,保证汽车行驶稳定的同时保证安全。
