振动压路机无人驾驶探析*
2021-06-01徐有军
沈 旭,徐有军
(南京交通职业技术学院,江苏 南京 211188)
压实机械按其压实原理不同可以分为静力式压路机、夯实机械和振动压路机三种。其中振动压路机因具有压实效率高、压实效果好等优点,被广泛使用在路桥和水利等施工建设之中。传统振动压路机的工作特点是“重复性、规律性、工作环境单一性”,其操作比较简单,操作人员易疲劳,操作环境比较恶劣,作业品质相对不高。因此,基于目前国内外工程机械市场对智能操控系统的需求旺盛和广阔的市场前景,同时也是为了提高机械设备工作效率、改善作业环境以及节约大量的人工成本,对传统振动压路机进行智能化升级改造,达到对振动压路机基本操作的远程控制,实现无人驾驶作业,具有较强的现实意义和应用价值。
1 振动压路机无人驾驶研究的关键技术
众所周知,无人驾驶主要是指以计算机为核心而构建的智能系统,赋予设备具有环境感知、规划、自动控制的能力从而实现仿人类驾驶[1]。无人驾驶的根本目的即是在无人干预的情况下,振动压路机沿着预先设定的路线或轨迹对需要碾压的路面进行压实,同时可以根据周围环境和自身状态等自行判断和改变行为方式。实现振动压路机无人驾驶的关键技术主要包括传感器技术模块、定位技术模块、车辆控制技术模块和计算机控制单元模块。
1.1 传感器技术模块
在无人驾驶技术中,因为压路机需要用GPS 或北斗系统接收机配合角位移传感器感知姿态(包括前车架姿态、后车架姿态及整车姿态),同时还需依赖超声波雷达或多线激光雷达甚至视觉技术感知障碍,因此传感器是实现压路机自动驾驶硬件系统必不可少的组成部分。压路机机身之外的环境信息需要通过布置在机身上的传感器获得。一般而言,常用传感器包括以下几种:①摄像头;②激光雷达;③超声波雷达;④毫米波雷达;⑤惯导组合技术等。
1.2 定位技术模块
定位技术模块主要包括区域定位和移动定位。为了满足压路机碾压重叠量的要求,在碾压区域进行定位时需要提供区域内各拐点高精度即经纬度定位坐标。区域定位的定位硬件一般采用带有差分技术的机载GPS或北斗接收器。因为振动压路机工作时的碾压速度相比汽车而言小很多,其移动定位的要求也远低于汽车,因此就单机无人驾驶振动压路机而言,其移动定位基本依赖机载GPS 或北斗接收器即可(压路机机群作业暂不赘述)。
1.3 车辆控制技术模块
该模块是压路机实现自动驾驶的硬件基础,主要指压路机通过上层(如电脑等控制单元)发出的数字信号或者模拟信号来控制压路机的行为。一般包括:①横向控制模块。主要是通过改变作用在方向盘上的扭矩或旋转角度来控制压路机的转向。②纵向控制模块。通过控制压路机的速度、加速度或者扭矩等对压路机进行驱动控制或制动控制。③功能性控制模块。其为定性控制,包括档位控制、各类信号灯控制等。④信号反馈模块。该模块主要作用是有助于专业技术人员确定车辆是否处于正常工作状态,如压路机行驶状态、接管状态、车速、摆角、车门和灯光状态提醒等。⑤通讯接口模块。主要有CAN总线通讯接口或车载以太网控制接口等[2]。
1.4 计算机控制单元模块
该模块为压路机的决策模块。由于压路机作业工况的复杂性与汽车相比相对较低,一般采用“IF-THEN”决策系统,依据具体规则编程。主要包括:①规划软件。即碾压施工工艺[3](见图1),严格按照进场规划、碾压规划、纠偏规划和避障规划实施循迹碾压。②规划硬件。一般采用工控机、自研发平台或第三方研发平台以满足计算机各类控制单元需求,实现压路机无人驾驶作业。③执行硬件。由于振动压路机具有不振、弱振和强振三种作业状态,而其行走速度和转向角度也需要无级调整,因此一般采用电控硬件。④辅助控制。如发动机操作的相关控制和供电等。
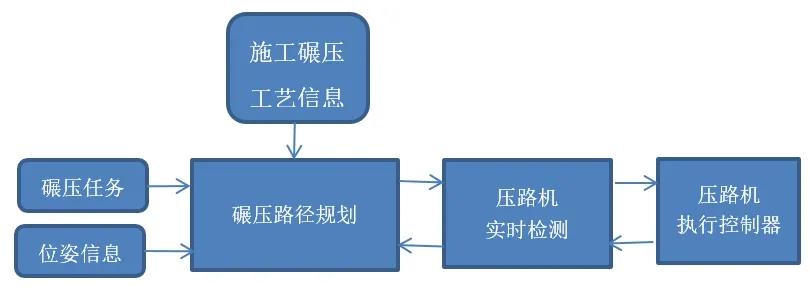
图1 碾压工艺路径规划示意图
2 振动压路机无人驾驶设计及无人驾驶改造
2.1 无人驾驶系统总体设计
无人驾驶系统设计的目的是利用PLC 来控制步进电机进而控制压路机的运动,通过软硬件设计进行实际接线和设置参数将PLC 及控制程序分别写入相应主机,最终通过遥控使无人驾驶压路机的作业效果达到人工驾驶的作业效果。该无人驾驶压路机系统有:①系统组成。包括传感器模块、电源动力模块、驱动模块、机械执行模块等,以使压路机在作业过程中实现路径保持功能、自动转向功能、自动避障功能、自动紧急制动功能及自动启停功能等。②路径规划。由于无人驾驶压路机的施工路径规划是以施工区域坐标为基础,在满足压实遍数、叠轮要求的前提下,利用边界收缩的方法取得路基路面施工段内的最大内接四边形,再对该四边形进行几何法规划等[4]。
2.2 振动压路机无人驾驶改造
改造思路是通过开关量的控制,将传统振动压路机上原机械操作全部替换为电子操控。
2.2.1 压路机自有设备改造
①转向控制单元改造。将由人力转动的方向盘带动转向阀转动改造为由PLC 控制的电机带动方向阀转动。②前后进退控制单元改造。将手动伺服手柄替换为主令开关-操作手柄并接入PLC 接口,进而通过单轴步进电机驱动器控制步进推杆的前后运动。③油门控制单元改造。将油门控制手柄也更换为主令开关-操作手柄,通过PLC控制步进电机驱动器以控制油门开度大小。
2.2.2 控制系统硬件改造
压路机控制系统的硬件主要包括车载计算机系统、伺服控制系统、无线遥控收发系统、监控系统和电源分配系统等。在安装改造时要求具备遥控和预编程作业功能,实现自动化控制,同时保留原有人工驾驶操控功能。
2.2.3 控制系统软件设计改造
控制系统的软件设计改造主要包括:①PLC控制程序。主要涉及到遥控和手动前进后退、左右转向、转速控制部分的PLC 控制设计。②人机交互界面。为便于实现振动压路机手动和遥控二个模式的相互转换以及对压路机的前进后退、左右转向和油门的控制,必须设计人机界面,将各类信号和参数显示在PC端的远程遥控界面上[5]。
3 无人驾驶振动压路机在路桥施工中的应用
在路桥施工中振动压路机施工水平的高低是路基路面压实质量的重要保证。然而传统压路机在碾压过程中经常存在漏压、欠压和过压等问题[6],同时由于振动压路机振动作业时周围强烈的振动环境对施工操作人员的身心健康造成较大伤害,因此,开发或选用无人驾驶振动压路机代替传统振动压路机进行碾压事半功倍。一般而言,在场内选择合适位置安装覆盖相关碾压场地的定位基站,再通过振动压路机上定位信号收发装置即可实现无人驾驶碾压作业。
近两年来,三一重工、徐工集团等国际知名企业相继开发了高精度GPS 或北斗卫星定位技术、计算技术以及传感技术,实现了压路机的无人驾驶精准作业。无人驾驶压路机实现了碾压速度、碾压遍数、振动频率、振动幅度以及重叠宽度等施工参数的精确与标准控制,极大地提高了施工质量和施工效率。例如在压实作业中,徐工集团生产的无人驾驶压路机可实现远程操控、覆盖电台和微波达2kW之多,碾压直线精度和重叠精度均达到5cm 之内,同时碾压轨迹即时记录、随时查询,还伴有远程唤醒、设备休眠和RTK-GPS高精度定位以及自适应自动引导技术等诸多先进配置。通过自决策无人驾驶的应用,极大地降低了劳动强度,并保障全天24 h不间断施工,进一步提高了施工效率和施工质量。
4 结语
条条大路通罗马,无人驾驶也不例外。压路机的作业工况不同、无人驾驶方案不同及技术成本不同,无人驾驶系统的架构和智能化程度的高低也不尽相同。随着无人驾驶、人工智能、远程控制、车联网及5G 等技术在工程机械行业内的应用,必将为国内相关企业带来新的机遇,加快和推动工程机械的智能化发展,届时振动压路机的自动驾驶技术、智能压实技术和可视化技术甚至智能化操控管理平台得以完全实现。
