基于超声波传感器的扫地机器人避障技术研究*
2021-06-01袁茂鸿林心如
袁茂鸿,王 姝,林心如
(福州大学至诚学院,福建 福州 350002)
随着科技的日新月异,扫地机器人进入了人们的日常生活,扫地机器人的研究和应用也引起了人们的广泛关注。其中的避障技术是讨论的热门话题之一,这需要扫地机器人运用各类传感器检查周围环境,获取相对应的信息,然后通过获取到的信息转换成各种复杂的指令,控制扫地机器人在复杂环境中完成避障指令。避障技术的实现最基本应做到对环境的感知,而环境的感知往往通过传感器来获取周围的环境信息,包括大小、位置以及材质。通过传感器收到的信息传回“大脑”,并及时对当前环境进行分析后,做出最优解,反馈给驱动部分,达到避障作用。
1 超声波传感器测距避障原理
超声波简单来说是一种频率高于20kHz 的声波,属于机械波的一种,其反射性强、能量集中、具有良好的定向性,在各个领域均有广泛应用。超声波的振动方向可简单的分为横波和纵波两种。超声波在固体、液体、气体等介质中传播时,衰减很少,且穿透能力较强。超声波传感器的主要工作原理是通过传感器对前方发出超声波,当遇到障碍物时,通过介质表面进行发射,传感器将捕捉并接收到一部分被放射回来的超声波,并转化为电信号。从发射到接收超声波所间隔的时间(T)和传感器与前方障碍物的距离(S)成正比,超声波以声波的速度(V)在介质中传播,可由式(1)算出传感器与前方障碍物之间的距离:

超声波传感器主要由压电晶体或镍铁铝合金组成,由于较大的机电耦合系数,输出的能量较大,工作具有很高的灵敏度,可以适用于高负荷传感器条件下的操作需求[1]。
2 超声波传感器电路设计
目前,常应用在扫地机器人避障方面的方法有:超声波避障、红外避障、激光避障和视觉避障等[2],在本文中,将对超声波避障进行研究和介绍。
2.1 超声波传感器整体电路设计
HC-SR04超声波模块可对前方半径2cm~400cm、角度100°以内进行障碍物感知和距离测量等功能,测量精度可达到毫米级别;模块主要有声波发射部分和声波接收部分组成。当初始状态触发信号时,HC-SR04超声波模块将会连续对外界发送高电平脉冲(脉冲宽度至少为10us)。在发送的同时,启动计时器,在捕捉到回响信号后,将得到计时器的时间。式(2)即可算出超声波与障碍物之间的距离(S)。

式(2)中,S为距离,T为高电平时间,340为声速(m/s)。
超声波模块的电路图如图1所示,将得到的测试距离通过P1.0端口和P1.2端口导入单片机当中,进行数据的处理和分析,及时计算与障碍物之间的最佳避障方案,通过控制驱动装置进行小车的驱动,来确保扫地机器人能够准确避障。
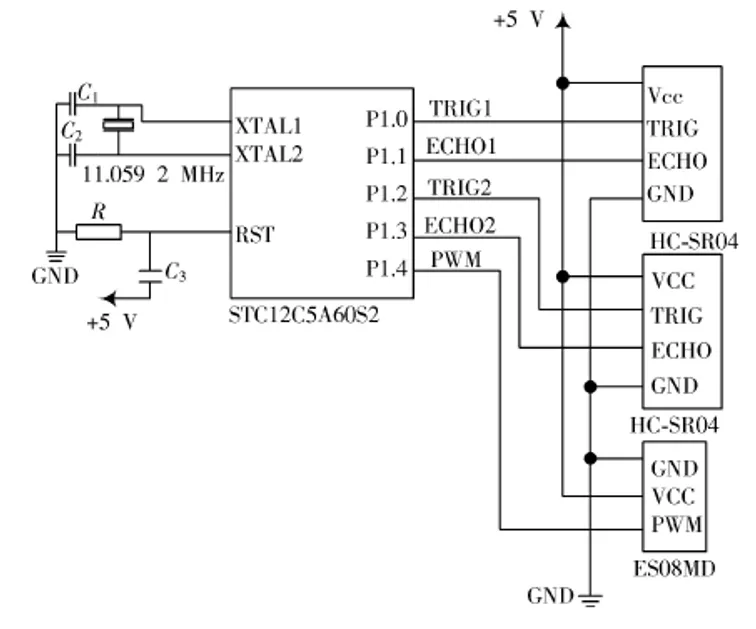
图1 HC-SR04 模块电路图
2.2 超声波传感器声波发射部分的电路设计
超声波传感器发射部分采用了换能器 TCT40-16T向外界发射40kHz 左右的方波脉冲信号。由单片机输出端将方波脉冲信号分成两路,一路传输至功率放大电路进行功率放大以便使发射距离足够远,满足测距要求,另一路传输至换能器 TCT40-16T,以声波形式发射到外界[3]。
超声波传感器声波发射部分电路图如图2所示,可通过调节可变电阻R14 使得换能器TCT40-16T 产生合适的振荡频率。将计时器的输入信号端与单片机引脚相连,使得超声波的发射受到单片机的控制[4]。
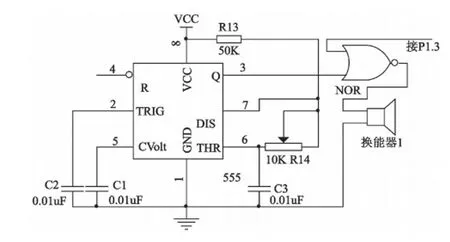
图2 超声波传感器声波发射部分电路图
2.3 超声波传感器声波接收部分电路设计
当发射部分发射超声波,在超声波遇到障碍物后,通过障碍物表面进行发射,由接收器及时接收并转化为电信号。由于电信号较为微弱,在超声波传感器声波接收部分电路图中加入了一组两级功率放大电路。其第一级固定放大倍数20 倍,第二级通过调节可变电阻R22 来改变放大倍数,可改变的区间为1~20 倍,故总放大倍数的区间为1~40倍,使得转化的电信号得到充足放大[5]。
超声波传感器声波接收部分电路图如图3所示,经过两级放大后的电信号,被输送到通用锁相环电路(LM567)的输入端。在LM567捕捉到电信号后,输出低电平(被捕捉时呈现高电平),电平跳变将引起单片机中断,计时器停止计时,记录的时段即为超声波从发射到接收的时段[6]。
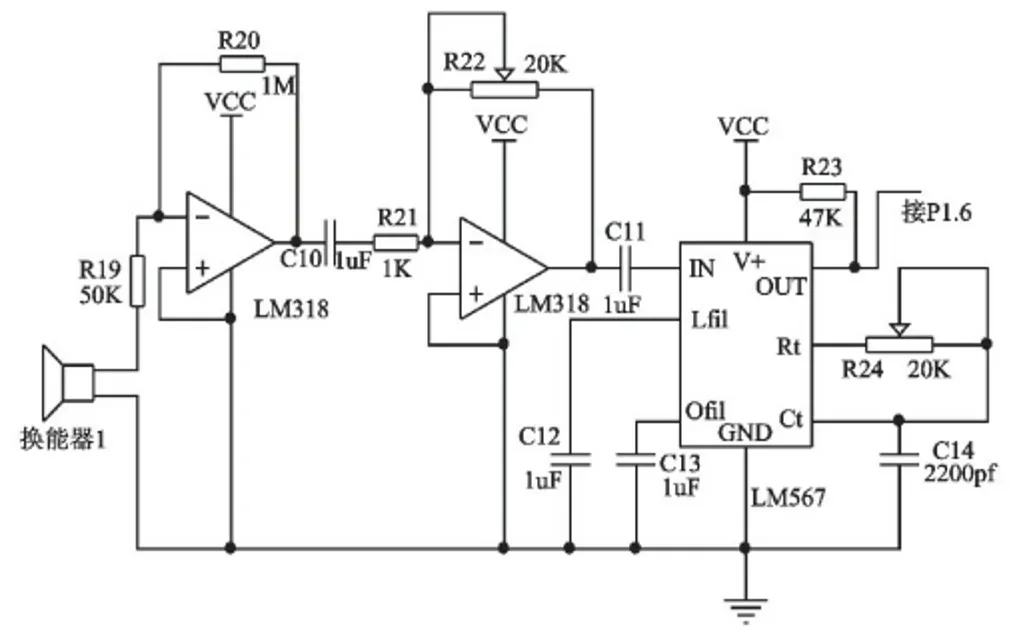
图3 超声波传感器声波接收部分电路图
2.4 多组超声波传感器电路设计
多组超声波传感器避障模块示意图如图4所示,在保证单个避障模块可以满足扫地机器人的正常运行前提下,在传感器避障模块的左侧和右侧分别加装了两个相同的模块,以保障扫地机器人在测距避障方面的精度,并在实验过程中能明显感受到在行进过程中避障能力有效的提升[7]。
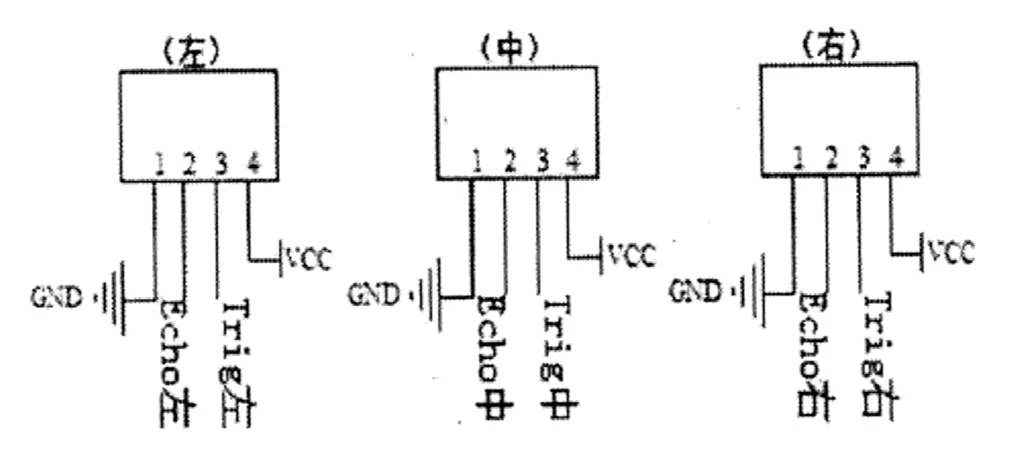
图4 多组超声波传感器避障模块示意图
3 超声波避障策略
扫地机器人的超声波避障策略设计流程图如图5所示。
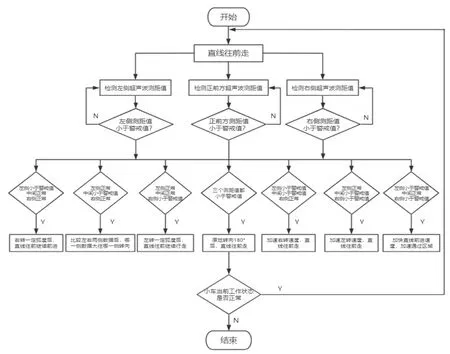
图5 超声波避障策略设计流程图
当扫地机器人开始工作时,扫地机器人左侧、正前方、右侧的超声波传感器将进入工作状态,通过单片机检测超声波测距值。距离前方障碍物的距离小于提前设置好的预警值时,将执行下一步指令,若未达到预警值,则不断重复执行上一步指令。单片机将传感器得到的数据进行整合并分析比较,并做出相对应的反馈,最终都将决定扫地机器人当前状态是否正常,若不正常则将重新返回第一步指令,正常则结束。
4 结束语
本文通过对超声波传感器发射部分和接收部分的电路图进行研究,结合多组传感器运用于扫地机器人,使得扫地机器人避障测距精度和避障能力得到有效提升,对避障策略进行重新设计,该技术可广泛运用于其他领域当中。
