采用水平集方法的无人机可见光DOM树冠分割
2021-06-01李亚东曹明兰李长青冯仲科贾树华
李亚东,曹明兰,李长青,冯仲科,贾树华
采用水平集方法的无人机可见光DOM树冠分割
李亚东1,2,曹明兰1,李长青1,冯仲科2,贾树华3
(1. 北京工业职业技术学院,北京 100042;2. 北京林业大学精准林业北京市重点实验室,北京 100083;3. 内蒙古大杨树林业局,大杨树,022456)
在天然林、混交林、复层林等复杂林分条件下,可见光森林影像受林分郁闭度、冠层结构、摄影季节等影响较大,对其进行树冠提取时,现有方法无法保证精度且缺乏有效的人工介入机制。该研究探索了一种能够在低郁闭度时自动分割,高郁闭度时可适当人工介入的树冠分割方法。先将无人机可见光森林影像处理成数字地表模型(Digital Surface Model,DSM)、数字高程模型(Digital Elevation Model,DEM)和数字正射影像图(Digital Orthophoto Map,DOM),DSM与DEM相减得到树冠高模型(Canopy Height Model,CHM),利用局部最大值法从CHM提取树顶点的平面位置生成泰森多边形,并以其外接矩形为基础生成树冠范围矩形,遍历并切分出单株立木树冠范围影像,进行各向异性扩散滤波后,通过水平集方法演化出树冠边界曲线。利用C#语言在ArcGIS Engine上实现基于水平集模型的可嵌入ArcMap运行的树冠分割插件。利用该插件对选自内蒙古大兴安岭大杨树林业局乃木河林场的不同郁闭度、不同树种组成的9块50 m×50 m天然混交林标准地的DOM影像进行树冠提取试验,同时与手工提取法和SVM图像分割法进行对比分析。结果表明本文方法的提取速度比手工提取法平均提高了45.97%;提取精度比SVM图像分割法平均提高了15.29个百分点。该方法在郁闭度低冠幅大时强调效率,在郁闭度高冠幅小时保证精度,是一种可伸缩性和通用性强的方法。
无人机;水平集;树冠分割;可见光;正射影像
0 引 言
树冠是反映树木生长状况的重要参数[1],通过树冠可推算林分密度、公顷株数、郁闭度等林分参数[2-5],通过建立数学模型可估测森林蓄积量、森林生长量、病虫害等[6-8]。采用传统方法测量树冠时工作量大、效率低,对测量结果难以复核[9],而森林遥感影像提取树冠方法可弥补传统树冠测量的不足。森林影像的纹理复杂、树冠边缘不规则,因此森林影像中分割树冠是森林影像处理的一项研究热点。早期研究以高分辨率卫星影像为主要数据源[10],但由于卫星遥感平台的轨道、高度、周期等原因,在尺度、时效性、成本等方面受到了一定制约。
无人机遥感平台具有周期短、分辨率高、操作简单、机动灵活等特点[11],弥补了卫片影像的不足。无人机搭载可见光相机比搭载多光谱相机和激光雷达,更加突出了其成本和灵活性方面的优势,在森林计测领域的应用日趋广泛。近年来对无人机森林影像树冠分割的研究较为活跃,但大多以多光谱相机和激光雷达数据源为主[12-17],专门针对无人机搭载可见光相机的树冠分割研究很少。目前针对无人机搭载普通光学相机树冠分割的研究,主要采用了光谱特征分类与纹理特征结合的面向对象分类法[18]、寻找最优阈值的标记控制分水岭分割法[19]、聚类与分水岭相结合的分割法[20]等,这些方法在人工林、纯林、某一树种等特定数据集上取得了较好的效果。但中国森林面积64%以上是天然林,其中存在大量的混交林、复层林等复杂林分结构,树冠分割受林分郁闭度、冠层结构、树种组成等影响较大,采用以上方法时存在如下问题:对影像进行特征筛选或样本训练时,由于可见光影像只有RGB(Red、Green、Blue)3个波段,可用于统计建模的信息量少,对天然林复杂林分结构建立的模型或参数的通用性较差。分水岭分割方法对人工林或纯林进行树冠分割的效果尚可;但对树冠纹理、形状及冠幅差异较大的天然混交复层林,采用腐蚀和膨胀等形态学运算对粘连树冠进行分割时,结果的可靠性低。对于郁闭度较大的天然混交复层林,无法完全摆脱人工,仅靠算法自动正确地分割出林分所有树冠,然而上述方法均缺少人工介入机制。鉴于此,本文探索一种能在低郁闭度时自动分割、高郁闭度时可适当人工介入的可交互式无人机可见光数字正射影像图(Digital Orthophoto Map,DOM)影像分割通用方法。
1 方法原理与步骤
水平集(level set)算法是美国数学家Osher和Sethian提出的[21],因能够自动处理曲线的分裂、合并等拓扑变化而得到广泛使用[22]。主要思想是将低维的计算上升到更高一维上进行处理。水平集方法能利用图像全局信息,克服了传统图像分割方法边界断续、扩展性差的缺点,对目标和背景灰度分布较均匀的DOM影像的分割效果好,且抗噪性好、实现简单、能够直接获取到边界矢量数据,容易进行树冠边界的调整。基于水平集的无人机可见光DOM影像树冠分割方法的具体步骤如下:
1)利用无人机搭载光学相机和PPK(Post Processing Kinetic)双频GPS后差分模块获取高重叠率影像,由PPK数据解算出摄影中心精确线元素,并与影像数据、POS(Position and Orientation System)数据经软件处理得到数字地表模型(Digital Surface Model,DSM)、数字高程模型(Digital Elevation Model,DEM)和DOM。
2)利用局部最大值算法[23]得到树顶点水平位置数据,对少量偏差大的点进行手工调整,再利用树顶点生成泰森(Voronoi)多边形,根据林分平均胸径和平均高等已知数据对泰森多边形的外界矩形设置一定预留量,确保每个树冠范围矩形能够完整包含该株立木的树冠范围。
3)遍历所有树顶点,并利用其树冠范围矩形切割DOM得到的其各自的树冠范围影像。
4)为使树冠范围影像突出树冠边界,简化细节,使树冠和背景的灰度分布更均匀,对其进行各向异性扩散滤波[24]处理,
5)利用树顶点设置水平集的初始值,并从各树冠范围影像分别演化出其包含的所有树冠边界线。
6)利用GIS(Geographic Information System)拓扑构面算法,对每一株树冠范围影像的所有树冠边界线和其树冠范围矩形进行拓扑构面.
7)并利用树顶点与拓扑构面结果之间的空间关系,提取出该株立木对应的目标树冠多边形。
8)利用GIS空间分析判断该目标树冠多边形与树冠范围矩形是否相交,进而判定是否需要人工介入编辑。
9)对这些少数无法自动正确分割,需要人工介入的目标树冠多边形进行手工编辑。具体如图1所示。
2 试验方法与数据处理
2.1 试验区概况
本次试验标准地选自内蒙古大兴安岭大杨树林业局乃木河林场(东经123°29′53″~125°18′37″,北纬49°12′42″~50°19′40″)。乃木河林场总面积793 033 hm2,其中林业用地643 414 hm2,有林地面积398 446 hm2,森林覆盖率50.24%。海拔300~450 m之间,温带大陆性气候,年平均气温-0.8 ℃,年平均降雨量450 mm,平均湿度85%,日照数为2 439.1 h,无霜期为110 d。主要树种有落叶松、樟子松、白桦、山杨、黑桦、柞树。
从内蒙古大兴安岭大杨树林业局乃木河林场森林资源二类调查档案数据库中,以起源为“天然林”、土地种类为“混交林”作查询条件,综合考虑郁闭度、树种组成及林龄等分布,随机抽取了9个小班,并在每个小班远离林缘的位置,分别布设了50 m×50 m大小的标准地共9块,标准地具体情况如下表1。
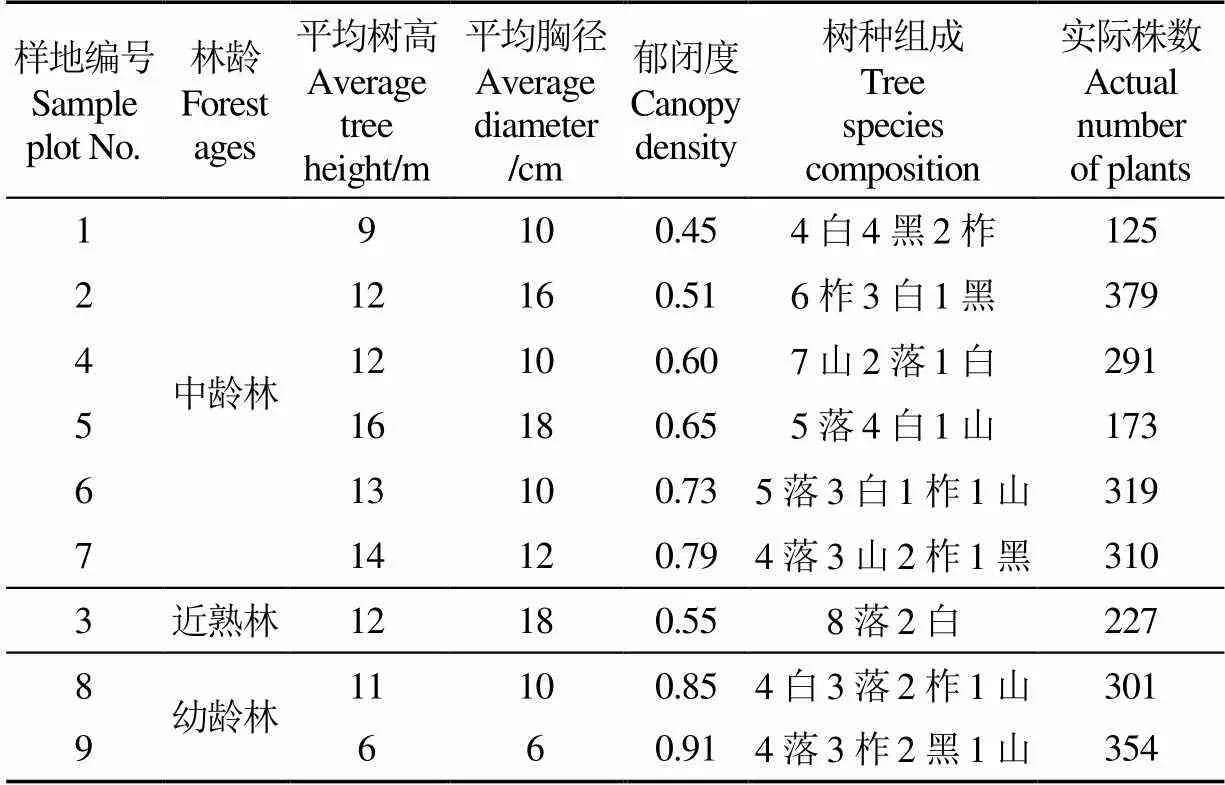
表1 标准地基本情况统计
2.2 数据采集
采用六旋翼无人机搭载AP5600微型5镜头倾斜摄影相机,成像传感器大小23.2 mm×15.4 mm,像素大小为4.25m,焦距为20 mm,侧视镜头倾角45˚,照片大小5 742×3 648像素;同时搭载PPK双频GPS后差分模块,对9块标准地进行数据采集。为确保内业数据处理得到的DOM影像能够完整地覆盖标准地,对每个标准地向四周扩充20%的边长范围进行了航空摄影数据采集,摄影航高为150 m,垂直相机航向重叠率为90%、垂直相机旁向重叠率为85%。现地调查并统计了9块样地的立木实际株数,同时对标准地内的每株立木的树冠采用皮尺测定了东西、南北2个方向的冠幅值。
2.3 数据处理
内业数据处理时,首先将外业采集到的9块标准地60 m×60 m范围的影像、POS数据和PPK数据导出,利用RTKLIB开源库[25]对PPK数据解算出摄影中心的精确线元素,再与POS数据的角元素合并导入到ContextCapture进行三维重建,最后利用SimActive Correlator3D软件经过DEM编辑和正射校正处理得到DSM、DEM和DOM。本文采用C#语言在ArcGIS Engine平台上,基于水平集的CV模型[26]开发可嵌入到ArcMap运行的树冠边界提取插件。利用插件对9块标准地的DSM和DEM进行相减得到CHM,并利用局部最大值法从CHM提取树顶点的水平位置。对少数偏差较大的树顶点进行位置调整,并生成泰森多边形,如图 2a,并利用泰森多边形生成了其对应的外接矩形如图 2b。为了让所有树冠都完全处于树冠范围矩形的内部,对外接矩形进行了25%的向外扩充,得到每一株立木的树冠范围矩形。
遍历所有树冠范围矩形来切割DOM即可得到每一株单株立木的树冠范围影像。高分辨率树冠范围影像的过度细节化对树冠提取有一定影响,为了消除树冠细节、同时保留树冠边界信息,对单株立木的树冠范围影像进行了各向异性扩散滤波处理,其中一株立木的处理效果如图3所示。
利用水平集方法对滤波后的树冠范围影像进行边界提取。图4是从样地整体DOM中按样木的树冠范围矩形切割出来的小影像,其边框即树冠范围矩形,图中线为自动提取到的所有树冠边界线,分别是来自3种不同郁闭度(低:≤0.59、中:0.60≤≤0.79、高:≥0.80)标准地中一株样木的树冠边界水平集方法自动提取效果。
利用水平集方法对滤波后的树冠范围影像进行边界自动提取时,在中低郁闭度条件下,大多数情况都能够取得效果较好,可直接将自动提取结果作为最终结果使用(如图4a、4b)。但在郁闭度偏高的林分仍有目标树冠与周边非目标树冠存在粘连,未能正确分割的情况(如图4c),需要进一步人工介入编辑这些未能正确分割的自动提取结果后,才能作为最终结果使用。
由于以上所得树冠边界线中含有非目标树冠的边界线,需要将目标树冠单独提取出来,因此将以上提取到的所有树冠边界线与树冠范围矩形框共同作为输入,利用ArcGIS Engine提供的 IGeometryCollection接口进行了构面处理,再构面结果与树顶点之间用IRelational Operator接口判断是否存在相交(cross)关系,并将具有相交关系的多边形作提取为目标树冠多边形。由于高郁闭度的林分情况下部分立木提取到的目标树冠多边形(如图4c)需要进一步人工编辑。因每个树冠范围影像都能够完全覆盖对应立木的树冠,因此正确提取到的目标树冠多边形的边界不会与树冠范围矩形的边框存在相交关系,因此可通过判断自动提取到每一株立木的目标树冠多边形与其对应的树冠范围矩形之间是否存在相交关系来判定是否需要人工编辑,并将需要人工编辑的目标树冠多边形的属性中标识了“建议人工介入”。
为了试验的准确性,本文将9块样地的水平集模型的初始边界线均设置为以树顶点为中心的5×5(像素)的矩形,迭代时间步长为0.05,最大迭代次数为2 000次。为了统一人工介入标准,本试验只对属性中标识有“建议人工介入”的立木树冠多边形进行了人工编辑,即只对目标树冠与非目标树冠未能正确分割,被提取成一个多边形的情形(如图4c所示)进行了人工编辑。在实际人工编辑的过程中,操作人员结合专业知识与经验,在自动提取的目标树冠多边形的基础上,利用插件所提供的编辑工具,进行手工勾绘修正并保存为最终结果。
将9块样地的DOM影像,按本文方法、支持向量机(SVM)的图像分割法(Image segmentation method)、手工提取法(manual extraction method)共3个方法进行了株数与树冠提取,并与现地调查的立木实际株数和皮尺测量的冠幅值进行了对比分析。株数识别精度的计算方法为

3 结果与分析
3种方法在不同样地上的提取效果对比如图5所示。
从图5a可以看出,3种方法的株数识别精度随样地编号的增大,总体呈逐渐降低的趋势。这主要是由于标准地1至9的郁闭度逐渐增加、林分密度逐渐增高、单株树冠面积逐渐减小造成的。其中,3号标准地的株数识别精度最好,比郁闭度更低的1号、2号标准地的株数识别精度还好,是由于3号标准地是近熟林、冠幅大,而且落叶松和白桦的冠型简洁清晰,比柞树和山杨更容易识别。从对比结果来看,在株数识别精度方面,3种方法中本文方法的精度明显高于SVM方法,基本与手工提取方法的精度相当。
从图5b可知,3种方法中SVM方法的株数识别绝对误差大于本文方法和手工提取法。这主要是因为SVM方法对粘连树冠的错误分割所导致,相比之下由于本文方法可对错误分割的粘连树冠进行人工介入编辑,因此株数识别绝对误差较低,效果处于SVM和手工分割法之间。但随着林分郁闭度的增加,3种方法的株数识别绝对误差都呈现逐渐增大趋势,这是因为随着林分郁闭度的增大,对于柞树和山杨等疏散分层形树冠结构的多主枝树种而言,即使人工判读也会产生一定错误识别。
从图5c可知,随着标准地林分郁闭度的增加,3种方法的树冠分割平均精度呈逐渐降低趋势,本文方法的树冠分割平均精度总体上高于SVM方法,在9块标准地上的冠幅提取平均精度比SVM方法提高了15.29个百分点。这主要是由于光学影像可用于建立统计学特征的信息量不足,导致SVM方法的树冠分割精度不稳定,在树种较少且郁闭度较低的情况下分割效果尚可,但郁闭度大于0.6、树种超过3种以上时冠幅提取精度明显下降。手工分割方法的精度高于自动分割方法,但同时也会导致效率的下降,由图5d可知,本文方法在低郁闭度条件下树冠分割耗时最少,效率最高。这因为本文方法不需要样本训练,因此在郁闭度低,冠幅大的林分分割时耗时低于SVM方法。虽然随着郁闭度的增加,需要人工介入的编辑的目标树冠不断增加,本文方法的分割效率呈现出下降趋势,但总体上好于手工分割方法,在9块标准地上的树冠分割速度比手工方法平均提高了45.97%。
结合图5c和图5d以看到,本文方法在低郁闭度时,耗时少于SVM方法,强调了分割效率。在高郁闭度时,树冠分割平均精度呈现出更加趋向于人工方法的趋势,保证了分割精度。是一种能够灵活地人工介入的,可伸缩性强的方法,对于树种组成复杂,密度分布不均匀的天然林影像而言通用性更强。该方法具有以下优点:1)无需设置初始值,因此树冠分割不受初始值影响、有效避免了初始值设置不当导致的错误分割,而且无需针对每个标准地训练大量的样本,从而提高了树冠分割效率。2)相比机器学习方法通过林分样本训练寻找全局最优参数的方式,本文方法根据树顶点水平位置生成泰森多边形等一系列步骤,将水平集模型的边界演化控制在单株树冠范围内,具有面向对象性。3)与分水岭方法分割结果得到林分总体冠幅的栅格文件相比,水平集CV模型的分割结果的树冠轮廓不仅图像被梯度驱动,同时还被边界曲率驱动,从而可以直接得到面向单株树冠的矢量边界要素,更便于人工介入编辑调整错误分割结果。本文方法提供了灵活的人工选择性介入的机制,在林分郁闭度低、冠幅大时强调了效率,在林分郁闭度高、冠幅小时强调了精度,具有较强的伸缩性和通用性,更具实用和推广价值。
4 结 论
本研究提出了一种将水平集方法与GIS空间分析相结合的,可自动判定人工介入条件的可见光正射影像半自动提取树冠的方法,并将该方法与基于向量机(SVM)的图像分割方法和手工分割法,在不同郁闭度、不同树种组成的9块天然混交林的标准地上进行了对比试验。试验结果表明本文方法的冠幅提取平均精度比SVM方法提高了15.29个百分点,树冠分割速度比手工方法平均提高了45.97%,在郁闭度低、冠幅大时强调了效率,在郁闭度高、冠幅小时保证了精度,有效缓解了天然混交林无人机森林可见光影像树冠提取难度大,采用全手工分割时效率低、完全采用自动分割方法时无法保证精度的问题。
[1]曾晶. 基于LiDAR与DOM数据的单木参数提取与程序开发[D]. 北京:北京林业大学,2016. Zeng Jing. Tree Parameters Extraction and Software Development Based on LiDAR and DOM[D]. Beijing: Beijing Forestry University, 2016. (in Chinese with English abstract)
[2]于东海,冯仲科. 基于无人机倾斜航空影像的树冠体积测算方法[J]. 农业工程学报,2019,35(1):90-97. Yu Donghai, Feng Zhongke. Tree crown volume measurement method based on oblique aerial images of UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(1): 90-97. (in Chinese with English abstract)
[3]王伟. 无人机影像森林信息提取与模型研建[D]. 北京:北京林业大学,2015. Wang Wei. Forest Information Extraction and Model Building Based on UAV Image[D]. Beijing: Beijing Forestry University, 2015. (in Chinese with English abstract)
[4]陈崇成,李旭,黄洪宇,等. 基于无人机影像匹配点云的苗圃单木冠层三维分割[J]. 农业机械学报,2018,49(2):149-155,206. Chen Chongcheng, Li Xu, Huang Hongyu, et al. 3D segmentation of individual tree canopy in forest nursery based on drone image-matching point cloud[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(2): 149-155. (in Chinese with English abstract)
[5]何艺,周小成,黄洪宇,等. 基于无人机遥感的亚热带森林林分株数提取[J]. 遥感技术与应用,2018,33(1):168-176. He Yi, Zhou Xiaocheng, Huang Hongyu, et al. Counting tree number in subtropical forest districts based on UAV remote sensing images[J]. Remote Sensing Technology and Application, 2018, 33(1): 168-176. (in Chinese with English abstract)
[6]李亚东,冯仲科,明海军,等. 无人机航测技术在森林蓄积量估测中的应用[J]. 测绘通报,2017(4):66-69. Li Yadong, Feng Zhongke, Ming Haijun, et al. Application of UAV aerophotographic system in forest volume estimation[J]. Bulletin of Surveying and Mapping, 2017(4): 66-69. (in Chinese with English abstract)
[7]李亚东,曹明兰,李长青,等. 无人机森林航摄影像三维点云估测林分蓄积量研究[J]. 中南林业科技大学学报,2019(3):56-60. Li Yadong, Cao Minglan, Li Changqing, et al. A research on three-dimensional point cloud estimation of forest stand volume by UAV forest aerial survey images[J]. Journal of Central South University of Forestry & Technology, 2019(3): 56-60. (in Chinese with English abstract)
[8]费运巧. 森林病虫害图像分析算法研究[D]. 北京:北京林业大学,2016. Fei Yunqiao. Analysis of Image Segmentation Algorithms for Forest Diseases and Insect Pests[D]. Beijing: Beijing Forestry University, 2016. (in Chinese with English abstract)
[9]樊仲谋,周成军,周新年,等. 无人机航测技术在森林资源调查中的应用[J]. 森林与环境学报,2018,38(3):297-301. Fan Zhongmou, Zhou Chengjun, Zhou Xinnian, et al. Application of unmanned aerial vehicle aerial survey technology in forest inventory[J]. Journal of Forest and Environment, 2018, 38(3). 297-301. (in Chinese with English abstract)
[10]付尧,王新杰,孙玉军,等. 树冠提取技术研究进展[J]. 世界林业研究,2013,26(4):38-42. Fu Yao, Wang Xinjie, Sun Yujun, et al. A study of tree crown information extraction method[J]. World Forestry Research, 2013, 26(4): 38-42. (in Chinese with English abstract)
[11]李德仁,李明. 无人机遥感系统的研究进展与应用前景[J]. 武汉大学学报:信息科学版,2014,39(5):505-513,540. Li Deren, Li Ming. Research advance and application prospect of unmannedaerial vehicle remote sensing system[J].Geomatics and Information Science of Wuhan University, 2014, 39(5): 505-513, 540. (in Chinese with English abstract)
[12]于旭宅,王瑞瑞,陈伟杰. 改进分水岭算法在无人机遥感影像树冠分割中的应用[J]. 福建农林大学学报:自然科学版,2018,47(4):428-434. Yu Xuzhai, Wang Ruirui, Chen Weijie. Forest canopy segmentation of UAV remote sensing images using improved watershed algorithm[J]. Journal of Fujian Agriculture and Forestry University:Natural Science Edition, 2018, 47(4): 428-434. (in Chinese with English abstract)
[13]李文静,王瑞瑞,石伟,等. 基于无人机多光谱影像的单木树冠提取方法[J]. 福建农林大学学报:自然科学版,2020,49(5):639-645. Li Wenjing, Wang Ruirui, Shi Wei, et al. Crown extraction method of individual tree based on multi-spectral image of UAV[J]. Journal of Fujian Agriculture and Forestry University: Natural Science Edition, 2020, 49(5): 639-645. (in Chinese with English abstract)
[14]卜帆,石玉立. 机载LiDAR高差和高分影像的城市树冠提取比较[J]. 遥感技术与应用,2017,32(5):875-882. Pu Fan, Shi Yuli. The comparison of urban tree crown extraction based on airborne LiDARelevation difference and high resolution Imagery[J]. Remote Sensing Technology and Application, 2017, 32(5): 875-882. (in Chinese with English abstract)
[15]刘清旺,李世明,李增元,等. 无人机激光雷达与摄影测量林业应用研究进展[J]. 林业科学,2017,53(7):134-148. Liu Qingwang, Li Shiming, Li Zengyuan, et al. Review on the applications of UAV-based LiDAR and photogrammetry in forestry[J]. Scientia Silvae Sinicae, 2017, 53(7): 134-148. (in Chinese with English abstract)
[16]全迎,李明泽,甄贞,等. 运用无人机激光雷达数据提取落叶松树冠特征因子及树冠轮廓模拟[J]. 东北林业大学学报,2019,47(11):52-58. Quan Ying, Li Mingze, Zhen Zhen, et al. Modeling crown characteristic attributes and profile of larix olgensis using UAV-borne LiDAR[J]. Journal of Northeast Forestry University, 2019, 47(11): 52-58. (in Chinese with English abstract)
[17]耿林,李明泽,范文义等. 基于机载LiDAR的单木结构参数及林分有效冠的提取[J]. 林业科学,2018,54(7):65-75. Geng Lin, Li Mingze, Fan Wenyi, et al. Individual tree structure parameters and effective crown of the stand extraction base on airborn LiDAR data[J]. Scientia Silvae Sinicae, 2018, 54(7): 65-75. (in Chinese with English abstract)
[18]金忠明,曹姗姗,王蕾,等. 天山云杉林无人机可见光影像树冠信息提取方法研究[J]. 林业资源管理,2020(1):125-135. Jin Zhongming, Cao Shanshan, Wang Lei, et al. Study on extraction of tree crown information from UAV visible light Image of piceaschrenkiana var. tianschanica forest[J]. Forest Resources Management, 2020(1): 125-135. (in Chinese with English abstract)
[19]杨勇强,王振锡,师玉霞,等. 基于无人机影像的天山云杉林单木树冠信息提取[J]. 新疆农业科学,2020,57(8):1484-1492. Yang Yongqiang, Wang Zhenxi, Shi Yuxia, et al. The extraction of single wood canopy of picea schrenkiana vartianshanica forest based on UAV image[J]. Xinjiang Agricultural Sciences, 2020, 57(8): 1484-1492. (in Chinese with English abstract)
[20]李丹,张俊杰,赵梦溪. 基于FCM和分水岭算法的无人机影像中林分因子提取[J]. 林业科学,2019,55(5):180-187. Li Dan, Zhang Junjie, Zhao Mengxi. Extraction of stand factors in UAV image based on FCM and watershed algorithm[J]. Scientia Silvae Sinicae, 2019, 55(5): 180-187. (in Chinese with English abstract)
[21]Osher S, Sethian J A. Fronts propagating with curvature dependent speed: Algorithms based on hamilton-jacobi formulation[J]. Journal of Computational Physics, 1988, 79: 12-49.
[22]宋昱,吴一全,毕硕本. 边缘修正CV模型的卫星遥感云图分割方法[J]. 光学学报,2014,34(9):30-37. Song Yu, Wu Yiquan, Bi Shuoben. Satellite remote sensing cloud image segmentation using edge corrected CV model[J]. Acta Optica Sinica, 2014, 34(9): 30-37. (in Chinese with English abstract)
[23]刘江俊,高海力,方陆明,等. 基于无人机影像的树顶点和树高提取及其影响因素分析[J]. 林业资源管理,2019(4):107-116. Liu Jiangjun, Gao Haili, Fang Luming, et al. Tree vertex and height extraction based on UAV imagery and analysis on its influencing factors[J]. Forest Resources Management, 2019(4): 107-116. (in Chinese with English abstract)
[24]Yu Y, Acton S T. Speckle reducing anisotropic diffusion[J]. IEEE Transactions on Image Processing, 2002, 11(11): 1260-1270.
[25]丁鑫,陶庭叶,陶征广,等. RTKLIB软件结构及调用方法[J]. 导航定位学报,2020,8(4):93-99. Ding Xin, Tao Tingye, Tao Zhengguang, et al. Discussion of software structure and calling method for RTKLIB[J]. Journal of Navigation and Positioning, 2020, 8(4): 93-99. (in Chinese with English abstract)
[26]Chan T F, Vese L A. Active contours without edges[J]. IEEE Transactions on Image Processing, 2001, 10(2): 266-277.
Crown segmentation from UAV visible light DOM based on level set method
Li Yadong1,2, Cao Minglan1, Li Changqing1, Feng Zhongke2, Jia Shuhua3
(1.,100042,; 2.,100083,; 3.,022456,,)
Under complicated forest stands like natural forest, mixed forest, and multi-storied forest, the visible light forest images are greatly influenced by the canopy density, canopy structure, and photographing season, etc. During the crown extraction, the existing methods fail to guarantee the precision and lack effective manual intervention mechanism. A universal, flexible, and practical crown segmentation method, which could realize the automatic segmentation under low canopy density and appropriately implement the manual intervention under high canopy density, was explored in this study. The unmanned aerial vehicle (UAV) visible light forest images were firstly processed into DSM, DEM, and DOM, the CHM was obtained by deducting DEM from DSM, the plane position of tree top was extracted from CHM via the local maximum method to generate a Thiessen polygon, a rectangle of crown range was generated based on its bounding rectangle, the image of crown range of an individual standing tree was traversed and segmented, and after the anisotropic diffusion filtering, the boundary curve of crown was evolved out through the level set method. A level set CV model-based crown segmentation plug-in that could operate with embedded ArcMap was implemented on ArcGIS Engine via C# language, this plug-in was used to do the crown extraction test of DOM images in nine 50 m×50 mstandard mixed forest sample plots with different canopy densities and different species compositions Naimuhe forest farm of Inner Mongolia Great Khingan Dayangshu Forestry Bureau, and meanwhile, this method was compared with the manual extraction method and SVM image segmentation method. The results showed that the extraction rate of the proposed method was averagely elevated by 45.97% in comparison with that of the manual extraction method, and the extraction accuracy was averagely improved by 15.29 percentage pionts compared with that of the SVM image segmentation method. Directing at the problems existing in the crown extraction from UAV forest visible light images of natural mixed forests, namely, the extraction difficulty was great and the existing methods were of low precision, a method integrating level set and selective manual intervention was proposed in this study, thus effectively avoiding the large workload in the full manual segmentation, and solving the problem that the precision could not be guaranteed by the machine learning method, which was inconvenient for the manual intervention. The level set method, which was not influenced by the initial value, was used, so it was unnecessary to seek for the initial value by training a large quantity of samples, and the crown segmentation efficiency was improved. The crown segmentation result is the vector line factor of the crown boundary of an individual standing tree, which can flexibly edit individual crowns. This method highlights the efficiency under low canopy density and large crown breadth, and guarantees the accuracy under high canopy density and small crown breadth, so it is of strong flexibility and universality.
unmanned aerial vehicle; level set; crown segmentation; visible light; ortho-image
李亚东,曹明兰,李长青,等. 采用水平集方法的无人机可见光DOM树冠分割[J]. 农业工程学报,2021,37(6):60-65.doi:10.11975/j.issn.1002-6819.2021.06.008 http://www.tcsae.org
Li Yadong, Cao Minglan, Li Changqing, et al. Crown segmentation from UAV visible light DOM based on level set method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(6): 60-65. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.06.008 http://www.tcsae.org
2021-01-13
2021-02-22
中央高校基本科研业务费专项资金项目(2015ZCQ-LX-01)。
李亚东,副教授,博士。Email:270273190@QQ.com
10.11975/j.issn.1002-6819.2021.06.008
S24;S758.5
A
1002-6819(2021)-06-0060-06
