基于LIDAR技术的喷雾量三维空间分布测试方法
2021-06-01何雄奎王志翀
李 天,何雄奎,王志翀,黄 战,韩 冷
基于LIDAR技术的喷雾量三维空间分布测试方法
李 天1,2,何雄奎1,2※,王志翀1,3,黄 战1,2,韩 冷1,2
(1. 中国农业大学药械与施药技术研究中心,北京 100193;2. 中国农业大学理学院,北京 100193;3. 霍恩海姆大学热带与亚热带农业工程研究所,斯图加特,70599)
为解决喷雾量分布测试中耗时长、工序繁琐、无法进行实时动态三维空间分布测量的问题,该研究开发了一种基于激光雷达探测技术的喷雾量三维空间分布的测试方法。针对植保作业过程中常用的空心圆锥雾、防飘空心圆锥雾、扇形雾和防飘扇形雾4类共7种喷头,采用喷雾量实测方法对距离喷头50 cm处雾流区截面的雾量分布进行测试;利用十六线激光雷达对雾流区进行三维探测,实时获取喷雾量点云数据信息,通过数据包解析、仿射矩阵空间转换、坐标系解算获取点云坐标及密度,并利用神经网络将喷雾量实测结果与激光雷达测试结果进行拟合。结果显示,7种喷头训练集拟合相关系数≥0.995,验证集≥0.935,测试集≥0.877,扇形雾喷头总体拟合相关系数≥0.990,证明激光雷达探测是一种可行且准确的喷雾量分布测试方法;进一步对各喷头喷雾量点云数据进行分层网格化计算得到雾流区三维空间雾滴分布特征,结果表明3种圆锥雾喷头空心段长度大小依次为ITR、TR和HCI喷头,IDK喷头等距离喷雾截面积均大于LU喷头。该方法可准确地完成三维空间喷雾量化分析,同时也可为喷雾设备雾化质量检测、室内和田间雾滴飘移测量、植保机械田间快速调校及作业质量在线监测提供一种新思路。
喷头;喷雾区;激光雷达;三维空间探测;雾量分布
0 引 言
植保作业过程中喷头是进行喷雾作业、保障防治效果的核心部件[1],其喷雾雾化机理、雾滴运动参数以及雾量三维空间分布状态与雾化质量息息相关[2-3],同时也会影响到农药雾滴的飘失和沉积行为[4]。农药飘失和沉积分布不均匀不仅会降低农药利用率及防效[5-6],还会造成大量的农药浪费以及严重的环境污染[7]。随着中国绿色发展战略的逐步实施,农药减量施用、增效控害作为其中的重要环节越来越受到研究者们的关注[8-9]。邱白晶等[10]等利用高速摄影结合数字图像处理技术,对雾流区雾滴特征参数进行了检测统计并进一步完成了雾滴分布图像的二维重建,实现了对雾滴分布特征的快速准确检测;Gary等[11]利用高速摄影及粒子图像测速技术(PIV,Particle Image Velocimetry)对8种喷头雾滴初速度进行测量,结合由激光粒径仪获取的雾滴粒径分析了雾滴初速度与粒径及喷雾压力间的关系;吕晓兰等[12]等利用相位多普勒粒子分析仪(PDPA,Phase Doppler Particle Analyzer)对标准扇形雾喷头的雾滴粒径和速度空间分布进行了测量,并对雾滴尺寸空间分布和雾滴运动特征进行分析,确定了飘失区域在雾流区中的位置;Nuyttens[13]等同样利用PDPA对32种喷头进行了雾滴粒径和速度的测试,明确了喷头种类和型号对雾滴粒径和速度的影响;而Cock[14]等则分别利用高速摄影与粒子图像测速技术结合法以及PDPA,对不同雾化等级的喷头进行了雾滴粒径和速度测试,对比分析了2种测试结果的差异;谢晨等[15]利用雾滴图像分析仪(PDIA,Particle Droplets Image Analysis)对标准扇形雾喷头与防飘喷头的雾化过程进行了可视化图像分析,并比较了喷头类型、喷头孔径与压力对喷头雾流区的影响;时玲等[16]使用雾量分布试验台测定并分析了喷雾压力、喷雾高度和喷头间隔对4种扇形雾喷头雾量分布的影响规律,并确定了每种喷头的最佳喷雾使用高度。使用高速摄影仪、PDIA、PDPA等仪器可对喷雾雾化过程以及雾滴运动参数进行准确测试,但高速摄影仪测试视场范围仅有5 mm×5 mm,PDIA和PDPA则为3 mm×3 mm,为取得雾流区完整探测结果需将仪器测试视场在雾流区范围内移动数10次,并将多个点位的探测结果拼接,难以对雾流区进行一次性整体实时测量;利用雾量分布试验台进行的喷头测试操作繁琐、耗时长、效率低,且无法获得整个雾流区的三维空间雾量分布。
激光雷达探测技术(Light detection and ranging,LIDAR)是一种利用激光束对目标进行空间位置精确探测的非接触式测量技术,目前已广泛应用于城市建模、大气监测、无人导航以及果树和林木探测等领域[17-21]。早在1989年,Hoff等[22]就利用气象快速捕获激光雷达(Atmospheric Environment Service Rapid Acquisition LIDAR)对有人驾驶喷雾飞机的翼尖雾场涡流进行探测;随后Stoughton等[23]以及Miller等[24]利用激光雷达针对林业农药喷雾作业过程中树冠顶部的雾流场运动进行了探测分析;近年来,Gil等[25-27]使用激光雷达测量果园植保作业过程中的喷雾飘移并实现了飘移量的量化计算。激光雷达可对空气中的雾滴直接进行探测,其激光探测范围大、操作便捷,且无需在喷雾液中添加示踪剂以及使用雾滴接收材料,但上述研究中采用的激光雷达均只能发射单束探测激光,仅能对雾流区进行沿激光线或截面探测而无法同时获取整体的三维空间分布状态。
为解决难以对喷雾区进行实时整体探测、一次性获取三维空间雾量分布的问题,进一步提升测试效率、简化测试流程和减少人力物力消耗,本文利用十六线激光雷达传感器,对目前国内外植保作业中常用的4类7种喷头进行喷雾实时探测,将探测结果与实际喷雾测试结果进行神经网络拟合验证激光雷达探测方法的准确性,进而使用Matlab进行点云数据分层和网格化计算,得到整个雾流区雾量的真三维空间分布,最终建立一种基于LIDAR技术的喷雾量三维空间分布测试方法。
1 基于LIDAR技术的喷雾探测方法
1.1 喷雾截面雾量分布实测方法
为研究不同雾化效果下的探测精度,选用7种国内外植保作业中常用的喷头进行测试。喷雾流量测量采用称重法,喷雾液为自来水,使用量筒于喷头下方接取喷雾液,计时1 min后停止接取并使用天秤称量,进行3次重复测量求平均值得到喷头流量;雾滴体积中值粒径、雾化等级及雾滴平均速度均依据ISO 5682-1: 2017[28],使用PDIA雾滴图像分析仪(VisiSize P15,Oxford Lasers)在室温25 ℃条件下,距离喷头出口正下方50 cm处进行测量所得,具体雾化参数如表1所示。
单个喷头实际雾量沉积分布测试采用矩阵式雾滴收集装置进行[30]。为避免喷雾过程中地效对雾滴接收产生影响,利用角钢及1 m×1 m方孔铁丝网架搭建雾滴收集平台,如图1所示,平台尺寸为1 m×1 m×0.5 m,网架方孔尺寸为3 cm×3 cm,在平台特定位点插入用于雾滴收集的50 mL聚乙烯(PE)塑料离心管,离心管口径3 cm,装置间隔为6 cm×6 cm。喷头固定于雾滴收集平台正上方0.5 m处,利用线激光将喷头水平定位至平台正中心;喷雾系统接入稳压器用于稳定喷雾压力。
本测试在中国农业大学药械与施药技术研究中心喷雾系统实验室进行,测试时间为2020年9月17-18日。测试开始前,将离心管安插入网架固定位置中,各离心管横竖间隔均为1网格:圆锥雾喷头测试网格中离心管采用9×9矩阵安插,实际测试范围54 cm×54 cm;扇形雾喷头测试网格中离心管采用5×15矩阵安插,实际测试范围30 cm×90 cm。喷雾液选用自来水,开启喷雾待压力稳定至0.3 MPa后开始接收雾滴,为保证全部离心管均能接收到足够量的雾滴并减少称量误差,雾滴接收计时3 min;喷雾结束后,利用分析天秤称量每根离心管中的喷雾液质量并记录;共计测试7种喷头,每种喷头重复测试3次。测试期间室内温度27.8 ~28.4 ℃,相对湿度50%~56%。
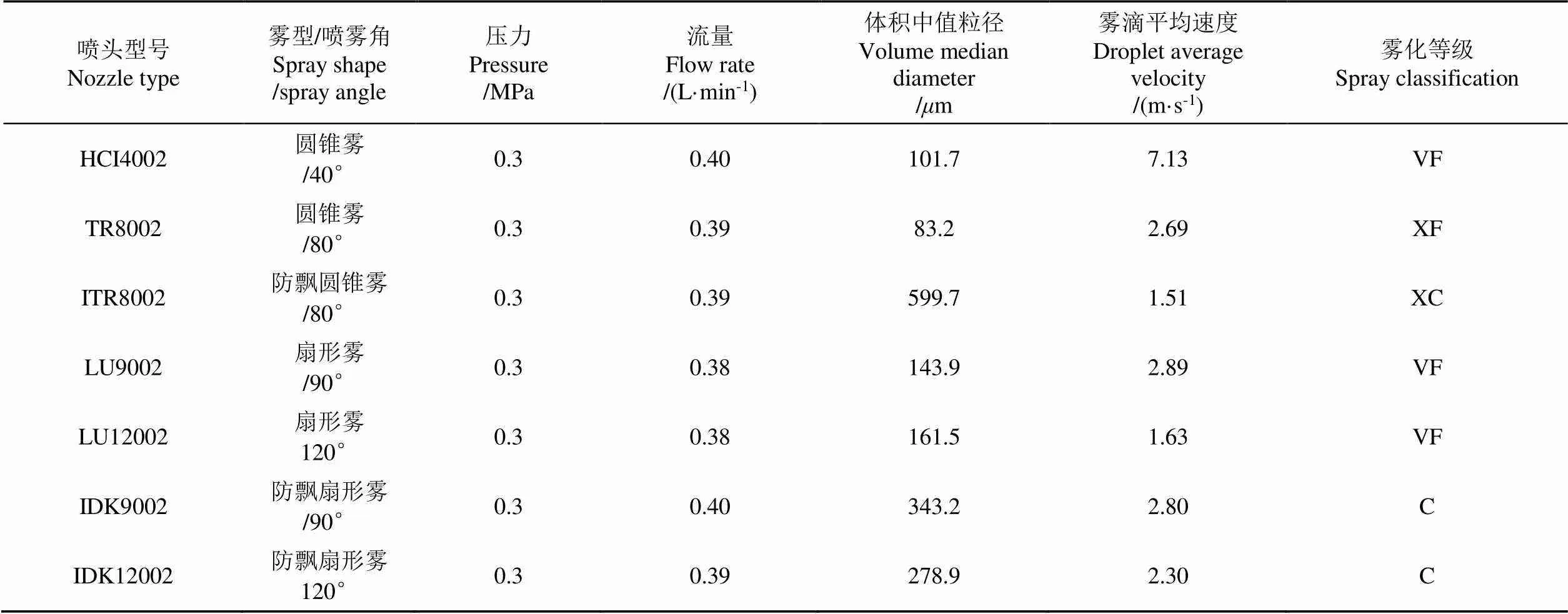
表1 喷头型号及测试参数
注:雾化等级的划分依照国际标准委员会制定的喷头雾化分级标准ISO 25358[29]进行。
Note: The classification of spray droplet is according to nozzle spray classification standard ISO 25358 made by International Organization for Standardization.
1.2 基于LIDAR技术的喷雾探测方法
1.2.1 点云数据获取
基于激光雷达的喷雾探测系统如图2所示,采用由北京北科天绘科技有限公司生产的R-Fans-16型激光雷达,可发射16条探测激光,激光波长905 nm,激光等级Class1,激光点频率320 kHz;激光扫描线角间隔2°,垂直视场角30°(-15°~15°),水平视场角360°;防水等级IP65,使用Ethernet通信接口。激光雷达测试分辨率随探测距离增大而减小,而如果激光雷达侧壁被飞溅的雾滴附着同样会影响激光回波的接收。因此本文将激光雷达放置于喷雾区上方紧贴喷头体的位置,激光雷达侧壁与喷头出口处于同一高度,此时激光雷达与喷头水平间距为5 cm,与喷头出口垂直间距5 cm。理论上当激光雷达垂直放置(垂直倾角0°)于喷雾区正上方时,其视场覆盖范围最大,但为避免喷头遮挡采用5°倾角进行安装,并利用倾角测量器Bevelbox确保安装准确。开启喷雾和激光雷达,调节喷雾压力稳定至0.3 MPa,激光转速设置为5 Hz,水平角分辨率0.36°,利用计算机端R-Fans-Ctrlview程序采集数据,采集时间60 s,每个喷头重复测试采集3次;采集结束后保存原始数据,用于后续解算及点云数据处理。本测试在中国农业大学药械与施药技术研究中心喷雾系统实验室进行,测试时间为2020年9月19-20日。测试期间室内温度28.1~28.7 ℃,相对湿度47%~51%。
1.2.2 点云数据处理方法
激光雷达工作时使用用户数据包协议(UDP,User Datagram Protocol)向计算机接收端口推送点云数据包,数据包内包含探测点的垂直角度、水平角度、探测距离及反射率等数据。点云数据处理基于Matlab2019b进行,由于激光雷达与水平面存在安装角度,使用仿射矩阵进行空间变换(式1)。其中是激光雷达激光发射中轴面与水平面夹角,由于在本试验中激光雷达为垂直5°倾角装置,因此该值为85°。
将经过空间转换的的点云数据由极坐标系解算为空间直角坐标系(图3),可得到每个探测点的直角空间坐标(,,),所有有效探测点共同构成喷雾场直角坐标系三维点云。将距离喷头50 cm处正负0.5 cm高度内的雾滴点作为计算范围,对该平面进行网格划分,各喷头探测结果的网格划分方法与同种喷头的喷雾实测方法相同,计算并输出各个网格横纵坐标、有效雾滴点个数及平均反射率。
注:为激光雷达扫描范围内的任意一点;,,分别是点对应的三维坐标值;为激光雷达到扫描点的距离,m;为点相对平面的垂直角度,(°);为激光线扫描水平角度值,(°);=coscos,=cossin,=sin
Note:is any point within the scanning range of LIDAR;,andare the three-dimensional coordinate values of point;is the distance from LIDAR sensor to scanning point, m;is the vertical angle of pointrelative toplane,is the scanning angle of laser line;=coscos,=cossin,=sin
图3 极坐标系转换为直角空间坐标系示意图
Fig.3 Schematic diagram of transformation from polar to rectangular coordinates
1.2.3 LIDAR探测结果与喷雾实测结果神经网络拟合方法
为量化2种测试结果之间的相关关系,验证激光雷达探测方法的准确性,经激光雷达探测并解算后所得结果与喷雾实测结果采用神经网络拟合法进行拟合[31]。神经网络拟合基于Matlab 2019b运行,具备2层前馈神经网络,并利用Deep Learning Toolbox 13.0搭建训练框架。基于激光雷达探测结果中距离喷头出口50 cm处网格化计算所得结果,该神经网络(图4)提取4项输入值作为自变量:网格的横坐标和纵坐标、网格内有效雾滴点数量和平均反射率,实测雾量真值作为因变量;激活函数为Sigmiod函数。拟合训练采用Levenberg-Marquardt(L-M)算法,设置训练集(Training)、验证集(Validation)和测试集(Test)比例为70∶15∶15;输出层采用线性拟合,输出结果包括训练集、验证集和测试集的相关系数Correlation coefficient()及均方误差Mean Square Error(MSE);
1.3 雾流区点云数据分层网格化计算
将解算后的三维点云沿喷头喷雾方向进行分层处理,由于喷头的实际应用中主要使用喷雾区后段,因此处理区间设置为距离喷头25~50 cm的喷雾区,每层厚度为1 cm,共26层;将分层后的点云数据继续逐层进行网格化处理,网格尺寸为6 cm×6 cm;假定喷雾场中逐一计算每层每个网格空间中全部有效探测点数量,结合网格空间坐标即可对喷雾雾场进行逐层量化输出。
2 结果与分析
2.1 LIDAR探测结果与喷雾实测结果对比
对比7种喷头50 cm处喷雾场截面分布的实测结果与激光雷达探测结果(图5),2种结果的喷雾区截面形态呈现较好的一致性。各训练样本集的样本数、经神经网络拟合所得结果MSE值和值如表2所示。各型号喷头测试结果在单独训练的情况下,训练集、验证集和测试集均取得了较好的拟合结果,训练集拟合相关系数≥0.995,验证集≥0.935,测试集≥0.877,其中4种扇形雾喷头单独拟合结果最好(≥0.990);进一步将7种喷头根据雾型划分为圆锥雾喷头和扇形雾喷头2个样本集分别进行拟合,其中扇形雾喷头拟合结果依然较好,训练集、验证集和测试集拟合相关系数≥0.974,而圆锥雾喷头拟合精度较差;分别利用圆锥雾和扇形雾喷头2个样本集使用的神经网络对各样本集下的喷头进行雾量分布预测,结果显示扇形雾喷头喷雾量分布预测结果与实测结果有较高的一致性,而圆锥雾喷头则显示出与实测结果相差较大,其原因为3种圆锥雾喷头间雾型差距较大,难以用同一模型完成拟合和预测。由上述结果可知,该神经网络可针对4种扇形雾喷头的激光雷达探测结果与实测结果完成高精度的拟合并作出准确的预测,尽管3种圆锥雾因彼此间雾型差距较大而无法兼容于同一神经网络模型,但在独立训练的前提下仍可获得较好的拟合精度,由此可以证明,激光雷达探测是一种可行且准确的雾量三维空间分布分析方法。
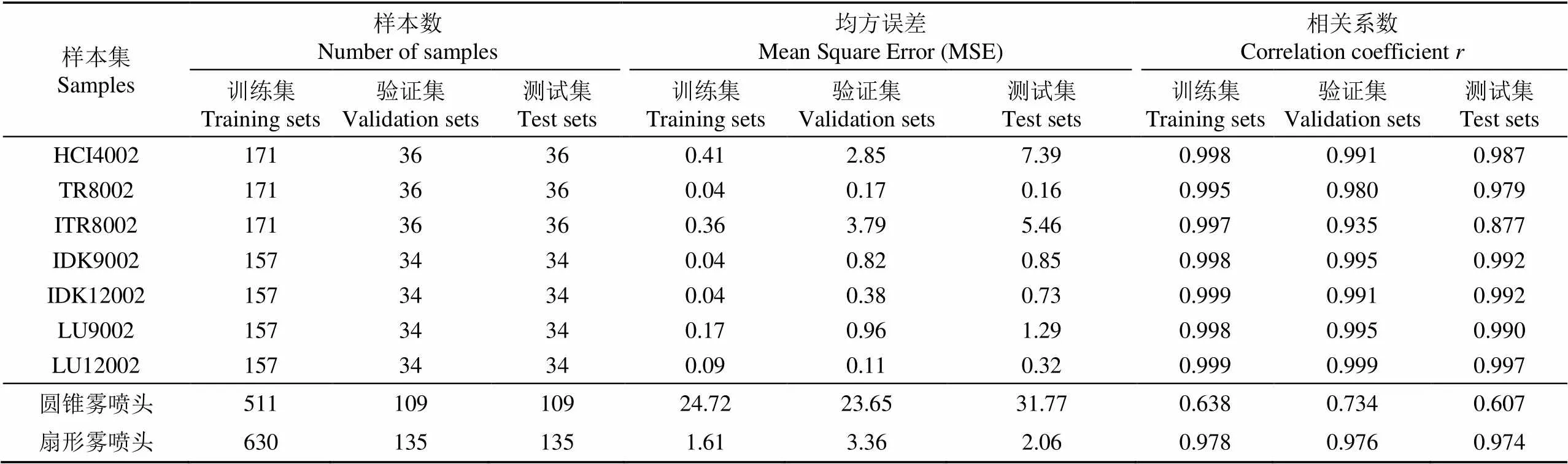
表2 各训练样本集拟合结果
注:样本集中圆锥雾喷头与扇形雾喷头的分类依据表1中喷头雾型划分。
Note: The classification of cone nozzle and flat fan nozzle in the samples is according to the spray shape in table 1.
2.2 基于LIDAR探测方法的喷雾区逐层计算结果
根据激光雷达扫描25~50 cm雾场所得点云数据的分层处理结果如图6所示,为体现喷雾场变化过程,在该范围内间隔5 cm选取截面图。HCI、TR、ITR 3种空心圆锥雾喷头的喷雾场形态均呈现为空心圆锥型,但空心区出现的范围不同:HCI喷头自35 cm之后出现实心截面,TR喷头自25 cm之后出现实心截面,而ITR喷头全程均为空心截面,本文将空心圆锥雾喷头喷雾场变化的不同阶段分别定义为空心段及实心段,3种喷头喷雾场变化过程如表3所示。对比3种空心圆锥雾喷头,空心段距离大小依次为ITR、TR和HCI喷头,根据表1所示 ITR喷头所产生的雾滴DV50远高于其余2种喷头,其雾滴惯性大,比表面积小,受环境相对气流阻力影响小,更易沿喷雾初始方向运动从而形成整体的空心圆锥雾场;其余2种喷头雾滴惯性小,受环境气流相对阻力影响较大,在远离喷头出口后运动状态逐渐转变为近似的自由落体,因此喷雾场在经历空心段后最终都形成了实心状态。
LU90、LU120、IDK90、IDK120 4种扇形雾喷头的喷雾场形态均呈现为扇型,在相同喷雾角前提下,截面积随喷雾距离增加而增大,且IDK喷头截面宽度大于LU喷头。IDK喷头所产生的雾滴粒径大于LU喷头,因此IDK喷头产生的雾滴具备更大的运动惯性和更小的比表面积,IDK喷头所产生的喷雾场截面雾场截面宽度大于LU喷头。

表3 3种空心圆锥雾喷头喷雾场变化过程
2.3 讨 论
基于LIDAR的喷雾场三维探测方法相比实测方法,主要具有3个方面的优点:1)可实时、一次性获取喷雾场雾滴数量三维空间分布结果。激光雷达可对喷雾场进行整体扫描探测,实时获取点云数据后进行数据解算、分层和网格化计算而得到整个喷雾场的三维雾滴分布状态,而传统实测方法仅能获得固定高度喷雾场截面的二维沉积分布状态。2)测试结果准确性高。激光雷达在喷雾过程中实时采集点云数据,保证了点云数据与喷雾状态的一致性;测试过程中全程使用计算机及电路开关控制,无需利用雾滴接收装置进行测量,避免了接收装置对雾滴运动状态的影响;探测结果由计算机程序解算得出,无需进行样品的采集与检测,避免了人为取样过程中可能的样品损耗,以及检测过程中的人为误差。3)测试方法便捷高效。进行喷雾场探测的过程中只需在固定位置架设激光雷达进行数据采集,无需使用接收材料及指示剂,减少了布样、收样和测样过程,完成一次测试仅需3 min,而实测方法进行一次测试则需要近30 min;探测数据的解算与量化分析全部由计算机完成,可实现无人批处理,直接输出喷雾场三维量化分析结果。本文在激光雷达测试方法的研究过程中,将喷头雾滴粒径假定为大小均匀以便于方法的建立,尽管目前研究结果显示该假定前提下的拟合结果较好,可以印证方法的可行性,后续仍将针对雾滴粒径对该方法测试精度的影响进行进一步研究。
目前针对植保机械及喷头的喷雾检测主要分为室内试验和田间试验,前者包含雾量分布测试和喷雾飘移风洞测试,后者包含田间喷雾沉积和飘移检测,此前研究人员依照相关测试标准如 ISO 9898:2000、ISO 5682-1:2017、ISO 22856:2008、ISO 22866:2005等,开展了大量的喷雾量分布、飘移测试[32-34],然而这些测试主要利用雾滴收集装置对喷洒出的液体进行收集,进而对收集到的雾滴进行定量分析,测试过程会耗费大量的人力物力且效率较低,同时这类方法难以做到对喷雾场的实时探测。尽管已有研究报道了LIDAR探测技术应用于果园喷雾机的田间喷雾飘移测量,但选用的激光雷达仅能进行单线或截面上的雾滴探测,依旧无法完成三维空间中雾滴分布的总体探测。计算流体动力学(Computational Fluid Dynamics,CFD)模拟可以对喷雾装置产生的喷雾场进行条件推演和模型预测[35-36],但环境气流、温湿度等因素对喷雾场的影响相对复杂,所得模型预测结果的准确性仍需要大量相同条件的实测结果进行验证。王志翀等[37]开发了一种基于激光成像技术的农药雾滴飘移评价方法,该方法可利用激光成像技术结合计算机图像批处理进行风洞中喷雾飘移的测量,快速准确地获取飘移率、飘移特征高度和飘移潜力指数,但由于激光成像受光照亮度限制难以应用于田间测量过程。本文开发的基于LIDAR探测的喷雾场雾量三维空间分布测试方法,既可以调整激光雷达的安装位置进行不同范围大小的喷雾场探测,又可以改变分层网格化的密度进行不同空间分辨率的雾量计算,更重要的是,该方法实现了喷雾场实时动态探测和一次性三维空间分布量化分析。因此该方法可以为喷雾设备雾化质量检测、实验室和田间飘移检测、植保机械喷雾系统的田间快速调校和作业质量的在线监测提供一种新思路。
3 结 论
本文提出了一种基于LIDAR技术的喷雾量三维空间分布测试方法,利用十六线激光雷达传感器,在实验室内条件下针对7种不同型号喷头的喷雾场进行了三维空间探测,同时利用神经网络拟合法将探测结果与喷雾实测结果进行拟合,验证了该方法的准确性,并进一步对各喷头喷雾区进行了逐层量化分析,得到以下结论:
1)对7种喷头喷雾场截面雾量分布与探测结果进行独立的神经网络拟合训练,训练集拟合相关系数≥0.995,验证集≥0.935,测试集≥0.877,其中4种扇形雾喷头单独拟合结果最好(≥0.990)
2)对4种扇形雾喷头数据样本集进行合并作为总体进行拟合,相关系数≥0.972,但3种圆锥雾喷头因相互间雾型差别较大,总体的拟合结果并不理想。
3)3种圆锥雾喷头喷雾场均存在空心圆锥部分,ITR8002喷头表现出全程空心圆锥状态,而HCI4002喷头与TR8002喷头喷雾场空心段分别为0~36 cm和0~28 cm;4种扇形雾喷头喷雾场均呈现为截面逐渐增大的扇型,IDK喷头喷雾场截面宽度大于具有相同喷雾角的LU喷头。
目前该方法主要针对实验室内单喷头喷雾进行测试,对于各类喷雾机多喷头喷雾的探测效果有待进一步研究。
[1]杨希娃,周继中,何雄奎,等. 喷头类型对药液沉积和麦蚜防效的影响[J]. 农业工程学报,2012,28(7):46-50. Yang Xiwa, Zhou Jizhong, He Xiongkui, et al. Influences of nozzle types on pesticide deposition and insecticidal effect to wheat aphids[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(7): 46-50. (in Chinese with English abstract)
[2]张京,宋坚利,何雄奎,等. 扇形雾喷头雾化过程中雾滴运动特性[J]. 农业机械学报,2011,42(4):66-69. Zhang Jing, Song Jianli, He Xiongkui, et al. Droplets Movement characteristics in atomization process of flat fan nozzle[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(4): 66-69. (in Chinese with English abstract)
[3]宋坚利,刘亚佳,张京,等. 扇形雾喷头雾滴飘失机理[J]. 农业机械学报,2011,42(6):63-69. Song Jianli, Liu Yajia, Zhang Jing, et al. Drift mechanism of flat fan nozzle[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(6): 63-69. (in Chinese with English abstract)
[4]王潇楠,何雄奎,Andreas. Herbst,等. 喷杆式喷雾机雾滴飘移测试系统研制及性能试验[J]. 农业工程学报,2014,30(18):55-62. Wang Xiaonan, He Xiongkui, Andreas Herbst, et al. Development and performance test of spray drift test system for sprayer with bar[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(18): 55-62. (in Chinese with English abstract)
[5]Otto S, Loddo D, Baldoin C, et al. Spray drift reduction techniques for vineyards in fragmented landscapes[J]. Journal of Environmental Management, 2015, 162(1): 290-298.
[6]王昌陵,宋坚利,何雄奎,等. 植保无人机飞行参数对施药雾滴沉积分布特性的影响[J]. 农业工程学报,2017,33(23):109-116. Wang Changling, Song Jianli, He Xiongkui, et al. Effect of flight parameters on distribution characteristics of pesticide spraying droplets deposition of plant-protection unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(23): 109-116. (in Chinese with English abstract)
[7]何雄奎. 改变我国植保机械和施药技术严重落后的现状[J]. 农业工程学报,2004,20(1):13-15. He Xiongkui. Improving severe draggling actuality of plant protection machinery and its application techniques[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2004, 20(1): 13-15. (in Chinese with English abstract)
[8]农业农村部、国家发展改革委、科技部、财政部、商务部、国家市场监督管理总局、国家粮食和物资储备局:国家质量兴农战略规划(2018—2022年)[EB/OL]. 2019-02-11[2019-02-20]. http: //www. moa. gov. cn/nybgb/2019/201902/201905/t20190517_6309469. htm
[9]何雄奎. 中国精准施药技术和装备研究现状及发展建议[J]. 智慧农业,2020,2(1):133-146. He Xiongkui. Research progress and developmental recommendations on precision spraying technology and equipment in China[J]. Smart Agriculture, 2020, 2(1): 133-146. (in Chinese with English abstract)
[10]邱白晶,史春建,吴春笃,等. 植保机械雾化场雾滴特征分析与二维重建[J]. 农业工程学报,2005,21(11):7-10. Qiu Baijing, Shi Chunjian, Wu Chundu, et al. Analysis of droplet characteristics in spray field for plant protection machinery and reconstruction[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2005, 21(11): 7-10. (in Chinese with English abstract)
[11]Gary J, Andrew J, Steve W, et al. A comparison of initial spray characteristics produced by agricultural nozzles[J]. Crop Protection, 2013(53): 109-117
[12]吕晓兰,何雄奎,宋坚利,等. 标准扇形雾喷头雾化过程测试分析[J]. 农业工程学报,2007,23(9):95-100. Lv Xiaolan, He Xiongkui, Song Jianli, et al. Analysis of spray process produced by agriculture flat-fan nozzles[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2007, 23(9): 95-100. (in Chinese with English abstract)
[13]Nuyttens D, Baetens K, De Schampheleire M, et al. Effect of nozzle type, size and pressure on spray droplet characteristics[J]. Biosystems Engineering, 2007, 97(3): 333-345.
[14]Cock N D, Massinon M, Nuyttens D, et al. Measurements of reference ISO nozzles by high-speed imaging[J]. Crop Protection, 2016(89): 105-115.
[15]谢晨,何雄奎,宋坚利,等. 两类扇形雾喷头雾化过程比较研究[J]. 农业工程学报,2013,29(5):25-30. Xie Chen, He Xiongkui, Song Jianli, et al. Comparative research of two kinds of flat fan nozzle atomization process[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(5): 25-30. (in Chinese with English abstract)
[16]时玲,张霞,吴红生,等. 扇形喷头雾量分布均匀性的试验研究[J]. 云南农业大学学报,2011,26(3):389-394. Shi Ling, Zhang Xia, Wu Hongsheng, et al. Experimental reaserch on spray distribution uniformity of fan nozzles[J]. Journal of Yunnan Agricultural University, 2011, 26(3): 389-394. (in Chinese with English abstract)
[17]Wang R, Peethambaran J, Chen D. LIDAR point clouds to 3-D urban models: A review[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(2): 606-627.
[18]Simone L, Fabio M, Marco R, et al. Impact of varying lidar measurement and data processing techniques in evaluating cirrus cloud and aerosol direct radiative effects[J]. Atmospheric Measurement Techniques, 2018, 11(3): 1639-1651.
[19]Weon I S, Lee S G, Ryu J K. Object recognition based interpolation with 3D LIDAR and vision for autonomous driving of an intelligent vehicle[J]. IEEE Access, 2020(8): 65599 - 65608.
[20]Yue S, Destaw A, Hui L, et al. A LIDAR-based tree canopy characterization under simulated uneven road condition: Advance in tree orchard canopy profile measurement[J]. Journal of Sensors, 2017:8367979.
[21]Underwood J P, Hung C, Whelan B, et al. Mapping almond orchard canopy volume, flowers, fruit and yield using lidar and vision sensors[J]. Computers and Electronics in Agriculture, 2016(130): 83-96.
[22]Hoff R M, Mickle R E, Froude F A. A rapid acquisition LIDAR system for aerial spray diagnostics[J]. Transactions of the ASAE, 1989, 32(5): 1523-1528.
[23]Stoughton T E, Miller D R, Yang X, et al. A comparison of spray drift predictions to LIDAR data[J]. Agricultural & Forest Meteorology, 1997, 88(1-4): 15-26.
[24]Miller D R, Salyani M, Hiscox A B. Remote measurement of spray drift from orchard sprayers using LIDAR[C]. ASAE Annual Meeting. American Society of Agricultural and Biological Engineers, 2003: 031093.
[25]Gil E, Llorens J, Llop J, et al. Use of a Terrestrial LIDAR sensor for drift detection in vineyard spraying[J]. Sensors, 2013, 13(1): 516-534.
[26]Gregorio E, Rocadenbosch F, Sanz R, et al. Eye-safe LIDAR system for pesticide spray drift measurement[J]. Sensors, 2015, 15(2): 3650-3670.
[27]Gregorio E, Rosell-Polo R, Sanz R, et al. LIDAR as an alternative to passive collectors to measure pesticide spray drift[J]. Atmospheric Environment, 2014(82): 83-93.
[28]Equipment for crop protection—Spraying equipment—Part 1: Test methods for sprayer nozzles[S]: ISO 5682-1. Paris: ISO Copyright Office, 2017.
[29]Crop protection equipment—Droplet-size spectra from atomizers—Measurement and classification[S]: ISO 25358. Paris: ISO Copyright Office, 2018.
[30]魏新华,于达志,白敬,等. 脉宽调制间歇喷雾变量喷施系统的静态雾量分布特性[J]. 农业工程学报,2013,29(5):19-24. Wei Xinhua, Yu Dazhi, Bai Jing, et al. Static spray deposition distribution characteristics of PWM-based intermittently spraying system[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(5): 19-24. (in Chinese with English abstract)
[31]Shin J, Chang Y K, Heung B, et al. Effect of directional augmentation using supervised machine learning technologies: A case study of strawberry powdery mildew detection[J]. Biosystems Engineering, 2020(194): 49-60.
[32]董祥,杨学军,严荷荣. 果园喷雾机喷雾量垂直分布测试系统[J]. 农业机械学报,2013,44(4):59-63. Dong Xiang, Yang Xuejun, Yan Herong. Test system of vertical spray distribution on orchard sprayer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(4): 59-63. (in Chinese with English abstract)
[33]王潇楠,何雄奎,宋坚利,等. 助剂类型及浓度对不同喷头雾滴飘移的影响[J]. 农业工程学报,2015,31(22):49-55. Wang Xiaonan, He Xiongkui, Song Jianli, et al. Effect of adjuvant types and concentration on spray drift potential of different nozzles[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(22): 49-55. (in Chinese with English abstract)
[34]Nuyttens D, Zwertvaegher I K A, Dekeyser D. Spray drift assessment of different application techniques using a drift test bench and comparison with other assessment methods[J]. Biosystems Engineering, 2017(154): 14-24.
[35]Hong S W, Zhao L, Zhu H. CFD simulation of pesticide spray from air-assisted sprayers in an apple orchard: Tree deposition and off-target losses[J]. Atmospheric Environment, 2018(175): 109-119.
[36]Zhang B, Tang Q, Chen L P, et al. Numerical simulation of spray drift and deposition from a crop spraying aircraft using a CFD approach[J]. Biosystems Engineering, 2018(166): 184-199.
[37]王志翀,何雄奎,李天,等. 基于激光成像技术的农药雾滴飘移评价方法研究[J]. 农业工程学报,2019,35(9):73-79. Wang Zhichong, He Xiongkui, Li Tian, et al. Evaluation method of pesticide droplet drift based on laser imaging[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(9): 73-79. (in Chinese with English abstract)
Method for measuring the 3D spatial distribution of spray volume based on LIDAR
Li Tian1,2, He Xiongkui1,2※, Wang Zhichong1,3, Huang Zhan1,2, Han Leng1,2
(1.,,100193,;2.,,100193,; 3.,,,,70599,)
Spray volume distribution in the three-dimensional (3D) space of nozzles is an essential interfering factor on spray drift and deposition of pesticide application, particularly on the atomization quality. Uniform distribution of spray can contribute to an obvious enhancement of pesticide efficacy, while reducing overuse and serious environmental contamination. However, the accurate measurement is still lacking in the real-time dynamic 3D distribution of spray volume, due mainly to long time consumption, and cumbersome procedure at present. In this study, a novel measurement for 3D spray volume distribution was developed using light detection and ranging (LIDAR) technology. Seven types of nozzles were tested, including the commonly-used nozzle of hollow cone, anti-drift hollow cone, flat fan, and anti-drift flat fan (HCI4002, TR8002, ITR8002, LU9002, IDK9002, LU12002, and IDK12002) in plant protection. The spray area of the nozzle was scanned using a 16-line laser LIDAR with the laser (Class 1) wavelength of 905 nm and the scanning range was -15°-15°. Specifically, the angular speed of horizontal rotation was 5 Hz, and the emission frequency was 320 Hz. The scanning lasted for 60 s, and all nozzles were tested with 3 replicates. The point cloud data was transferred to the laptop in form of packets in real time. MATLAB 2019b software was used to run the affine matrix and coordinate system transformation after data packet analysis for the droplet coordinates and spatial density. Meanwhile, the real value of spray volume distribution was measured in the spray section of 50 cm below the nozzle. Polyethylene (PE) centrifugal tubes with a volume of 50ml were arranged in a matrix to collect the droplets. Four kinds of fan nozzles were tested by a 5×15 collector matrix, and three kinds of hollow cone nozzles were tested by a 9×9 collector matrix. All nozzles were measured three times, and all tests lasted for 3 min, in order to collect enough droplets for a small weighing error. A neural network with 1 hidden layer (100 hidden neurons) and 1 output layer was used to fit the relationship between the traditional measurement and LIDAR scanning. The ratio between training, validation, and testing set was 70:15:15. The results showed that a high fitting precision was achieved in all seven kinds of nozzles for the correlation coefficient in the training set≥0.995, validation set≥0.935, testing set≥0.877, and the correlation coefficient≥0.990 for the flat fan nozzles. It proves that the LIDAR scanning can accurately and quantitatively analyze the spray volume distribution. The 3D spatial distribution of spray volume for all 7 nozzles was obtained after the spray area was layered and meshed, then to calculate the droplet density in each grid. A faster and easier procedure was made for the real-time 3D spray volume distribution, compared with the conventional one. The LIDAR technique can also be expected to provide an alternative way for atomization quality detection of sprayers, indoor and field test of spray drift, particularly on a rapid adjustment and online monitoring of operation quality in plant protection machinery in the field.
nozzles; spray area; LIDAR; 3D spatial detection; spray volume distribution
李天,何雄奎,王志翀,等. 基于LIDAR技术的喷雾量三维空间分布测试方法[J]. 农业工程学报,2021,37(6):42-49.doi:10.11975/j.issn.1002-6819.2021.06.006 http://www.tcsae.org
Li Tian, He Xiongkui, Wang Zhichong, et al. Method for measuring the 3D spatial distribution of spray volume based on LIDAR[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(6): 42-49. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.06.006 http://www.tcsae.org
2020-12-23
2020-02-23
国家自然科学基金(31761133019);国家重点研发计划(2017YFD0700903);国家现代农业产业技术体系(CARS-28-20)
李天,博士生,主要研究方向为植保机械与施药技术。Email:406491500@qq.com
何雄奎,教授,博士生导师,主要研究方向为植保机械与施药技术。Email:xiongkui@cau.edu.cn
10.11975/j.issn.1002-6819.2021.06.006
S24:S123
A
1002-6819(2021)-06-0042-08
