软体水果采摘机械手系统设计分析与试验
2021-05-31华超褚凯梅陈昕朱银龙
华超,褚凯梅,陈昕,朱银龙
(南京林业大学机械电子工程学院,南京 210037)
水果采摘是农林生产过程中最重要的环节,目前水果采摘主要依靠人工完成,存在效率低、成本高、劳动量大等问题[1],因此实现水果采摘的自动化变得越来越迫切[2]。目前,很多农林采摘机器人都实现了智能化,大大提高了采摘效率[3],但大部分末端执行器都使用传统的刚性机械手,一般存在结构复杂、灵活性差、与环境交互性低等问题,极易在抓取过程中损坏抓取产品,难以实现无损采摘[4-5]。
软体机械手的出现为水果采摘提供了新的思路和方法。Hao等[6]基于气压驱动设计了一种软体手爪,可以根据所抓取物体的形状改变自身的长度,达到稳定抓取的效果。Wehner等[7]采用硅橡胶材料,制作了一种基于气动网络的执行器,具有变形大、柔顺性好、交互性好的特点。She等[8]设计了一种内嵌驱动和传感器的软体手爪,可以实时反映手爪的工作状态,具有活动灵活、交互性好等特点。Brown等[9]设计了一种新型基于颗粒堵塞的软体机器人,由软材料和颗粒状咖啡豆组成,通过施加负压,可实现对整体结构刚度的调整,在抓取物体时可以自适应物体的形状,并且可以通过提高刚度,提高抗干扰能力。
软体机械手的出现解决了传统刚性机械手结构复杂、交互差等问题,由于材料的柔顺性,减小了对抓取物体的损伤,并且能够自动适应抓取物体的形状大小,通过变刚度结构提高抗干扰能力。可以看出软体机械手适用于对水果的无损抓取,具有广阔的应用前景[10-11]。本研究利用仿真分析得出最优的结构参数设计软体机械手样机,通过试验研究末端力的输出大小以及抓取的效果,设计的软体机械手能够实现对水果产品的无损抓取,在一定程度上解决了刚性机械手柔顺性差、交互性差等问题。
1 软体采摘机械手的设计与制作
1.1 软体采摘机械手的结构设计
软体机械手通常利用局部应变差产生弯曲自由度,即在同一气压驱动下,不同刚度材料层产生的应变不同,层间会产生不均匀的位移,在材料自身应力的作用下,软体机械手会向应变较小的材料层弯曲[12]。
基于上述原理,软体采摘机械手由4个驱动手指和法兰盘组成,如图1所示。每个驱动手指由应变层和限制层构成,应变层是由硅胶材料制成的多气囊结构,各个气囊间通过腔道连接,限制层是一层壁厚均匀的硅胶。利用硅胶黏合剂将限制层和应变层粘合起来,使驱动手指成为一个空腔结构。法兰盘和驱动手指通过螺栓连接,其中装配法兰盘的中心孔用于与机械臂连接。充气时,应变层的气囊结构应变较大,受限制层的约束,驱动手指向内弯曲;抽气时,应变层的收缩率大于限制层的收缩率,驱动手指向外弯曲;当排尽腔体内的气体,由于材料的柔顺性,驱动手指恢复原形。
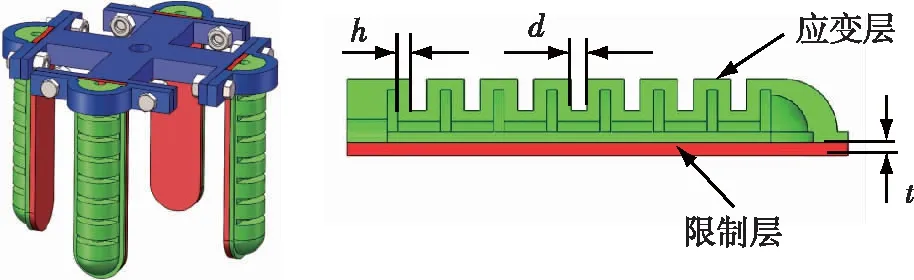
图1 软体采摘机械手的结构示意图Fig. 1 Structure diagram of software picking manipulator
1.2 软体驱动手指的制备
本研究采用3D打印技术对模具进行制作,模具由应变层模具和限制层模具两部分组成,如图2所示,制备过程如下:
1)硅胶选用Smooth-ON公司生产的Dragon Skin 20材料,将硅胶A、B两组按1∶1的比例混合,分别取20 g,利用搅拌机搅拌均匀。
2)将配制好的硅胶材料均匀倒入模具中,并用端盖进行密封,为了避免气泡的产生,在应变层端盖模具上预留几个孔,用来排除多余的硅胶。
3)静置5 h后,将端盖模具从底部模具中拔出,得到应变层和限制层,通过硅胶将两部分黏合在一起,待其完全黏合,即可得到驱动手指实体。
4)为了保证气路的密封性,便于气管的插入,在通气孔插入快插接头,利用硅胶黏合剂将接口密封。
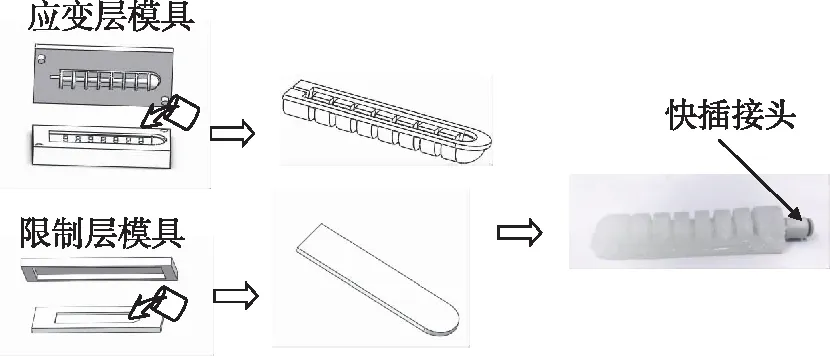
图2 驱动手指制备流程图Fig. 2 Driving finger preparation flow chart
2 软体采摘机械手有限元分析
设计的驱动手指结构参数如图1所示,主要有腔体厚度h、气囊个数k、气囊间隙d以及限制层厚度t,为了分析结构参数对驱动手指弯曲性能的影响,采用ABAQUS对其进行有限元仿真分析,得到最优的结构参数。驱动手指的弯曲变形属于非线性大变形,Yeoh模型能够表述其材料的特征[13],其应变能密度函数表示为:
(1)
式中:Ci0和Di为待定系数;I1为变形张量;J为弹性体积比,硅胶视为不可压缩材料时,J=1。
通常使用二项参数形式的应变能密度函数[14],Yeoh模型典型的二项参数形式为:
W=C10(I1-3)+C20(I1-3)2
(2)

(3)
联立式(2)和式(3),可得主应力σ1和主伸长比λ1之间的关系:

(4)
通过拉伸实验得到应力与应变的拟合曲线,如图3所示,经过ABAQUS处理分析得到其材料参数C10=0.11,C20=0.02。
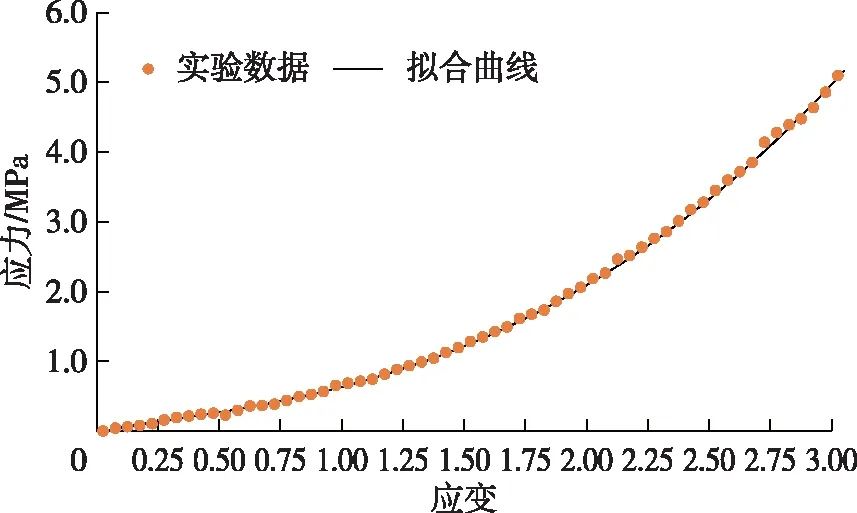
图3 拉伸实验应力与应变的关系Fig. 3 Relationship between stress and strain in tensile test
仿真过程中,采用流体腔模型来实现充气模拟,并将充气端所在平面完全约束。由于属于大变形,分析步中需打开几何非线性开关。在网格单元类型设置中,选择四面体网格,几何阶次为二次,考虑到硅胶材料不可压缩,故采用杂交单元类型,网格划分如图4所示。

图4 驱动手指网格划分图Fig. 4 Grid division diagram of drivefinger
2.1 腔体壁厚对驱动手指弯曲性能的影响
分别对腔体壁厚为1.5,2.0,2.5以及3.0 mm的驱动手指仿真分析,其中气囊个数为8个,气囊间的间隙为3 mm,限制层厚度为2.5 mm。
不同腔体壁厚对弯曲特性影响的仿真结果见图5a。在相同气压下,腔体壁厚越大,弯曲角度越小,且随着气压的增大,弯曲角度增大的趋势逐渐放缓。壁厚为1.5 mm驱动手指在气压为40 kPa时的仿真图见图5b,由于壁厚太薄,无法约束驱动手指的径向膨胀,在限制层和应变层的连接处应力较大,极易损坏驱动手指;当壁厚3 mm时,材料自身的应力会大大限制其弯曲变形,故腔体的壁厚不宜太大。当壁厚2.5 mm时,既能满足弯曲角度的要求,且弯曲趋势较为平缓,驱动手指不易损坏。
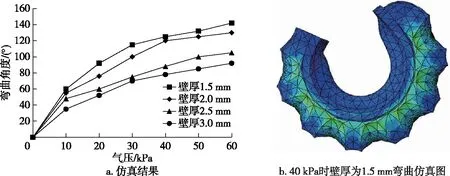
图5 腔体壁厚对驱动手指弯曲特性的影响Fig. 5 Influence of cavity wall thickness on bending characteristics
2.2 气囊个数对驱动手指弯曲特性的影响
分别对气囊个数为8,10和12个的驱动手指进行仿真分析,其中腔体壁厚为2.5 mm,气囊间隙为3 mm,其厚度为2.5 mm。
气囊个数对驱动手指弯曲特性影响的仿真结果见图6,可见气囊个数对驱动手指弯曲特性影响不大,软体机械手实际使用时可根据被抓取物体的大小,选择合适的气囊个数,改变驱动手指的长度,达到对物体的稳定抓取。

图6 气囊个数对驱动手指弯曲特性的影响Fig. 6 Influence of the number of air bags on the bending characteristics
2.3 气囊间隙对驱动手指弯曲特性的影响
分别对气囊间隙为1,3和5 mm的驱动手指进行仿真分析,其中腔体壁厚为2.5 mm,气囊个数为8个,限制层厚度为2.5 mm。
气囊间隙对驱动手指弯曲特性影响的仿真结果见图7。当间隙为1 mm时,气压高于30 kPa时,由于气囊间隙较小,相邻气囊间变形发生干扰,且限制层的变形较大,导致弯曲角度变化较小;当间隙为5 mm,气压在20~50 kPa时,弯曲角度基本不变,气压大于50 kPa后,由气囊间隙太大,应变层无法限制其径向膨胀,导致驱动手指失效。故本研究采用间隙为3 mm的驱动手指结构。
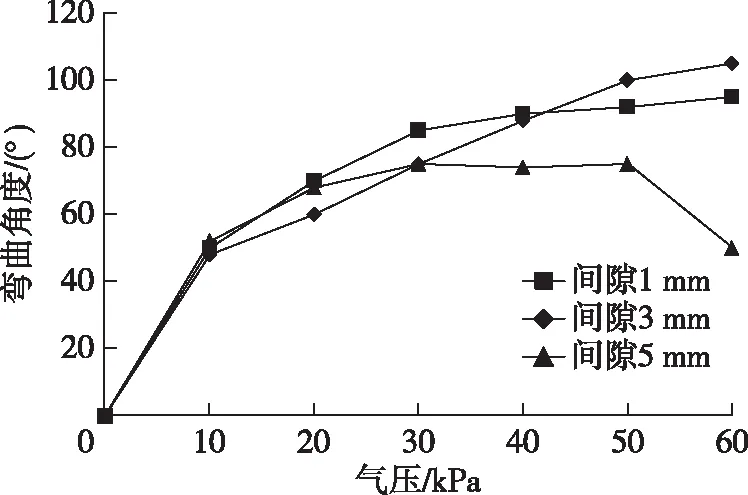
图7 气囊间隙对驱动手指弯曲特性的影响Fig. 7 Influence of airbag clearance on bending characteristics
2.4 限制层厚度对驱动手指弯曲特性的影响
分别对限制层厚度为1.5,2.0,2.5和3.0 mm的驱动手指进行仿真分析。其中腔体壁厚为2.5 mm,气囊个数为8个,气囊间隙为3 mm。
限制层厚度对驱动手指弯曲特性的影响见图8。同一气压上,限制层壁厚越大,弯曲角度越小。当限制层厚度为1.5 mm,气压超过50 kPa时,由于限制层厚度太薄,限制层一侧变形较大,径向膨胀无法限制,最终导致驱动手指失效,弯曲角度不再变化。

图8 限制层厚度对驱动手指弯曲特性影响Fig. 8 Influence of limiting layer thickness on bending characteristics
通过上述对驱动手指各参数的有限元分析,其结构参数既要满足驱动手指能够达到一定弯曲角度,也要避免由于径向膨胀等原因造成驱动手指失效,故得到最优的结构参数为:腔体壁厚为2.5 mm,气囊个数为8个,气囊间隙为3 mm,限制层厚度为2.5 mm。
3 软体采摘机械手试验分析
3.1 软体采摘机械手弯曲特性试验
软体采摘机械手试验平台如图9所示,利用Stm32单片机与Labview通讯,实时获取比例阀的输出气压大小。继电器模块控制电磁阀的通断,控制气体的流向;DAC模块进行数/模转换控制输出模拟电压的大小,决定比例阀的开合大小,调节气压的大小。

1. Labview上位机;2. 继电器模块;3. 三极管放大电路;4. Stm32单片机;5. 比例阀;6. 直流电源;7. 真空发生器;8. 电磁阀;9. 驱动手指。图9 试验现场Fig. 9 Experimental site
当真空发生器工作时,驱动手指内部产生负压,向外侧弯曲;当比例阀工作时,驱动手指根据输入气压的大小,向内弯曲相应的角度。为了验证仿真结果的准确性,利用比例阀控制输入气压的大小,在网格上绘制出不同气压下驱动手指的弯曲图,如图10a所示。
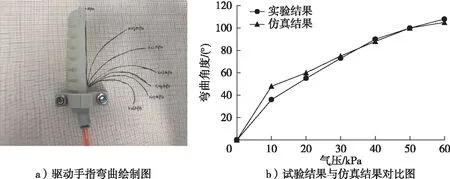
图10 软体采摘机械手弯曲特性试验Fig. 10 Bending characteristic test of soft picking manipulator
试验结果与仿真结果的对比曲线见图10b。可以得到有限元仿真结果与试验结果基本吻合,能够准确反映驱动手指的弯曲特性,但当气压为10 kPa时,误差较大,分析原因可能是:1)刚开始充气时,气压输出不太稳定,驱动手指无法保持在稳定状态导致的测量误差;2)有限元仿真中本构模型的材料参数与实际参数存在一定误差。
3.2 软体采摘机械手末端输出力试验
软体采摘机械手末端输出力的大小决定着其负载能力,设计了如图11所示的试验装置对其进行测量。

图11 驱动手指末端输出力试验Fig. 11 Output force experiment at the end of driving finger
利用推拉力计分别在弯曲角度为0°,15°,30°,45°,60°,75°和90°对不同气压作用下的驱动手指输出力进行测量。由于驱动手指的末端输出力与抓取物体表面垂直,应保证推拉力计与末端所在平面垂直。试验结果如表1所示,在驱动手指弯曲过程中,末端输出力随着弯曲角度的增大而减小,当弯曲到最大角度时,末端输出力为0;并且在相同弯曲角度下,充气压力越大,末端输出力越大。

表1 驱动手指末端输出力Table 1 Output force at the end of the drive finger
可见当软体采摘机械手抓取物体时,应该根据抓取物体的大小和抓取力的大小来选择适当的气压。
3.3 软体采摘机械手抓取试验
利用如图12所示的机械臂与软体采摘机械手连接,方便进行抓取试验。当抓取较大物体时,可先采用真空发生器产生负压,使各个驱动手指向外侧弯曲(图12a),以适应抓取物体的大小,待机械臂到达抓取位置时,切换比例阀工作,使驱动手指向内弯曲,抓取物体。抓取可分为包络抓取和指尖抓取[15],针对这两种抓取方式进行分析。

图12 软体采摘机械手抓取实验Fig. 12 Soft picking manipulator grasping experiment
首先对包络抓取进行分析。由于包络抓取是将整个物体包裹住,与物体接触面积大,通过弯矩产生较大的抓取力,适用于体积较大的物体,故选用苹果、梨、西红柿和芒果进行抓取,如图12b所示。可以看出软体采摘机械手可以很好地贴合物体表面,实现稳定抓取,且抓取物表面无损坏。
各水果的质量及驱动气压如表2所示。随着抓取物体质量的增加,所需的驱动气压也增大。当抓取芒果时,驱动气压达到最大,可见软体采摘机械手包络抓取的最大负载约为5.8 N。
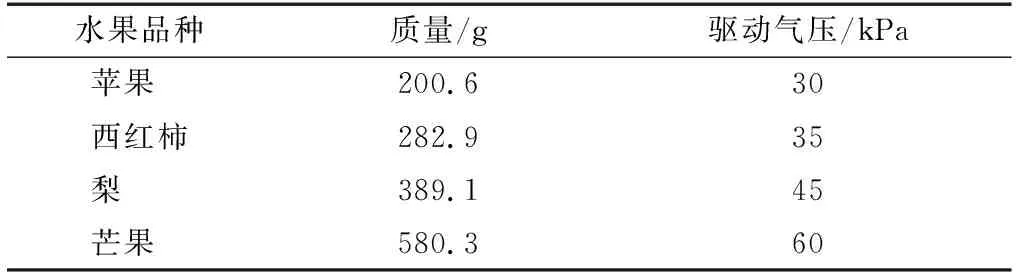
表2 抓取物体质量及驱动气压Table 2 Grasping object mass and driving air pressure
然后对指尖抓取进行分析。指尖抓取是通过驱动手指的指尖与物体接触,接触面积较小,末端输出力无法提供较大的抓取力,主要针对体积较小的物体,故选用圣女果作为抓取对象,质量为15.3 g,在驱动气压为10 kPa时,即可实现抓取,如图12c所示。指尖抓取虽然可以实现对体积较小物体的无损抓取,但抓取的稳定性不足,容易造成抓取物体的脱落。造成这种现象的主要原因是驱动手指刚度太小,可以通过减小其长度或者添加变刚度结构来提高刚度。
对比上述两种抓取方式,包络抓取自动适应物体的形状和大小,能够实现对体积较大物体的抓取;指尖抓取可以对体积较小的物体进行抓取,但抓取的抗干扰能力较弱,通过适当提高其刚度以达到稳定抓取。可以根据不同的工作环境和抓取对象选择合适的抓取类型,对水果进行无损抓取。
4 结 论
基于软体机器人的工作原理,提出了一种用于水果无损抓取的软体采摘机械手,利用3D打印技术制作的模具,制备出驱动手指,并通过法兰盘将4个驱动手指装配成软体采摘机械手。为了分析驱动手指的结构参数对弯曲特性的影响,采用ABAQUS有限元分析对各个结构参数进行分析,优化了驱动手指的结构参数。搭建试验平台,在0~60 kPa驱动气压作用下,通过弯曲特性试验验证了有限元仿真的准确性,通过末端输出力试验得到弯曲角度与末端输出力的关系,最后对包络抓取和指尖抓取两种抓取方式进行对比分析,得出软体采摘机械手的最大输出力大约为5.8 N。
