自推进红外诱饵发展现状及干扰红外导引头机理分析
2021-05-31刘国生周建波马贤杰李增光
刘 杰,刘国生,周建波,陈 宁,马贤杰,李增光
(中国航天科工集团8511研究所,江苏 南京210007)
0 引言
传统红外诱饵作为干扰红外制导导弹最简单有效的方式,可有效对抗早期红外制导导弹。随着制导技术的发展,传统红外诱饵在对抗先进红外精确制导武器方面已显得力不从心[1]。
红外导引头实现抗干扰是基于对比干扰与目标在各种信息上的不同,从而识别出目标,达到抗干扰的目的[2]。目标与干扰在信息上的不同主要表现在运动、光谱、空间位置、能量、形状等特性[3-5]。随着第三代(十字叉型导引头、玫瑰花扫描导引头)、第四代(成像导引头)红外制导导弹的装备,导引头的抗干扰能力大大增强。对于十字叉型导引头,截获目标后,通过缩减波门,滤除干扰和背景,紧紧套住目标,实现抗干扰;对于玫瑰花扫描和红外成像型导引头,采用准成像和成像方式获取目标图像,通过图像预处理、图像分割、特征提取和图像识别提取目标图像特征,采用相关跟踪、运动轨迹预测跟踪、航迹外推等跟踪算法对目标运动轨迹进行预测,实现抗干扰。
传统红外诱饵与飞机平台运动轨迹区别明显,导引头采用波门选通或轨迹识别方法可以很容易剔除干扰;自推进红外诱饵由于自带动力,抛射后伴随载机飞行,可逼真模拟载机的运动特征,能有效干扰先进红外制导导引头。本文介绍了先进红外制导导引头工作原理和抗干扰措施,分析了自推进红外诱饵干扰先进红外导引头的原理,为对抗先进红外制导导引头提供思考。
1 自推进红外诱饵工作原理
自推进红外诱饵通过特殊的喷喉以及弹体气动外形设计,燃烧产物从尾喷口喷出,为诱饵提供动力,使诱饵抛射出筒后保持与载机相似的运动特征,模拟载机的运动轨迹;同时,喷射出的燃烧产物形成红外辐射源,且辐射强度大于载机尾喷管和尾焰,辐射光谱与载机相近,逼真模拟载机的红外辐射特征。因此,自推进红外诱饵可以逼真模拟载机的运动轨迹特征和红外辐射特征,从而能够有效对抗具有轨迹识别能力的红外制导导引头。其工作原理示意图如图1所示。

图1 自推进红外诱饵弹工作原理示意图
2 国外自推进红外诱饵发展现状
国外装备的典型自推进红外诱饵主要有Esterline公司MJU-71/B、MJU-57/B、Kilgore公司MJU-47/B、MJU-39/40B、洛勒尔公司Loralei伴飞诱饵、切姆林公司K 7等,均已经装备到F-16、F-18、F-22等多种机型上,到2012年动力式诱饵研制经费投入将近100亿美元,装备订货量将占诱饵市场份额的20%左右,研究新型诱饵技术对抗具有运动轨迹识别技术的红外成像制导导弹已成为国外电子战领域的研究热点和发展趋势之一。
MJU-71B是Esterline公司开发的一种自推进红外诱饵[6],采用改进的MTV药剂作为烟火材料。这种烟火材料既产生诱使敌方导弹远离飞机的红外能量,同时也起推进剂的作用,能产生足够的推力,使诱饵弹跟随飞机飞行而不会迅速下落。MJU-71/B的尺寸为25 mm×25 mm×206 mm,可从美国空军的标准投放系统上投放,外形如图2所示。

图2 MJU-71/B自推进式红外诱饵
MJU-57/B,如图3所示,其尺寸为φ36×150 mm,主要包括火箭发动机、点火组件、尾翼,火箭发动机包括固体推进剂、不锈钢管、塑料喷嘴装置等。
MJU-47/B红外诱饵如图4所示,它采用改进的MTV药剂作为烟火材料。MJU-47/B的尺寸为52 mm×65 mm×200 mm,质量为123 9 g,可从美国空军的标准投放系统如AN/ALE-45/47上投放,用于F-15、F-16等战斗机上。

图3 MJU-57/B自推进诱饵

图4 MJU-47/B自推进红外诱饵
MJU-39/40B由推进/红外复合装药和SMD 2种载荷组成,尺寸为52 mm×65 mm×260 mm,该弹专为F-22飞机研制,由AN/ALE-52投放器投放。光谱和强度上能够形成与飞机红外特征相似的红外辐射,并且在飞行速度和运动轨迹方面与载机相当,可以诱骗具有目标光谱鉴别和运动识别能力的红外制导导弹。
洛勒尔公司研制Loralei空气动力式诱饵主要用在下一代战术飞机。它用火箭作动力,由标准的干扰投放器弹射,诱饵运动轨迹和红外辐射特征与载机相似。切姆林公司研制的K7自推进型红外诱饵如图5所示,其性能参数为:弹体尺寸:51.82 mm×24.64 mm×206 mm;质量为540 g;发射后质量为460 g;红外输出>2.0 kW/sr(4~5μm);上升时间<0.1 s;最小燃烧时间为1.5 s;发射速度为26~54 m/s。自带推进载荷,可用于对抗具有抗轨迹识别能力的热寻的和红外成像制导导弹,匹配投放器包括AN/ALE40、45和47系列以及M 130/M 147等。
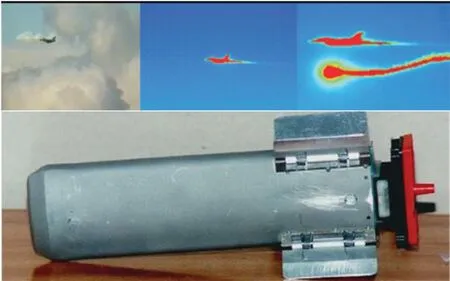
图5 K7自推进诱饵的实物图及战术使用效果图
3 先进导引头工作原理及抗干扰措施分析
自第一代红外制导导弹问世至今,红外制导导弹已经发展到第四代,攻击范围从尾后攻击发展到全向攻击,工作波段从近红外向远红外发展,制导体制从点源制导向成像制导转变,制导精度进一步提高、抗干扰能力进一步增强。其中,具有运动轨迹识别能力的导引头为采用十字交叉/玫瑰花扫描体制的第三代红外制导导引头,以及具有成像能力的第四代红外制导导引头。
3.1 十字叉型导引头
3.1.1 工作原理
十字叉型导引头系统由光学系统、探测器及信号处理电路3大部分组成[7]。工作方式为圆锥扫描式,在像平面上产生像点扫描圆。像平面上放置十字叉型探测器阵列,目标像点以圆的轨迹扫过十字叉型探测器列阵。图6为反射式光点扫描光学系统示意图。

图6 反射式光点扫描光学系统示意图
十字叉型导引头信息处理电路原理方块图如图7所示。方位和俯仰十字叉探测器臂产生的脉位调制信号分别输入到各自的前置放大器进行放大,然后馈入各自的对数放大器,再将对数脉冲信号分别经过各自的开关电路后,进入采样、保持缓冲电路,对来自基准信号发生器的正弦基准信号和余弦基准信号电压进行采样、保持,以产生瞬时的直流误差电压VAZ和VEL,此瞬时直流误差电压大小由脉冲信号相对于正弦基准和余弦基准瞬时值的位置来决定,也就是由目标偏离光轴的失调角大小来决定,直流电压的极性由目标偏离光轴的方向来确定,因此,直流误差电压即可反映目标的方位信息。控制导引头向减小直流误差的方向运动,即可实现对目标的准确跟踪。

图7 十字叉型导引头信息处理电路原理方框图
3.1.2 抗干扰措施分析
从图7可看出,十字叉型导引头采用波门脉冲发生器控制开关电路,只有开关电路的门打开的时间内,目标脉冲进入波门,开关电路才输出一脉冲信号,这个脉冲信号对相应的基准信号采用保持缓冲后,输出一直流误差电压。此直流电压又反馈到波门脉冲发生器中与相应的基准信号进行比较,产生新的波门脉冲去套住下一个周期探测器产生的电脉冲。在波门脉冲未加到开关电路的其他时间内,开关电路不让其它脉冲或干扰信号通过,利用波门的选通作用,达到剔除背景和干扰的目的。波门脉冲出现的时间与目标脉位调制信号出现的时间完全同步,而目标脉位调制信号与目标的空间方位有关,从缓冲器输出的直流误差电压反映目标的方位,当目标和干扰在空间差异明显时,采用波门选通可以很容易将干扰剔除。
3.2 玫瑰线扫描导引头
3.2.1 工作原理
玫瑰线扫描导引头使用2个反向旋转的偏斜光学元件,偏斜光学元件可以是光楔、倾斜镜或者偏心透镜。把红外光学系统中常用的卡赛格伦系统的主反射镜和次反射镜各对光轴偏斜同一角度γ,并各自以F1和F2的转速绕光轴反方向旋转,便实现玫瑰线扫描,如图8所示。

图8 玫瑰线扫描光学系统示意图
玫瑰线扫描轨迹方程为:

式中,ρ为扫描花瓣长度,即视场半径,与偏斜角度有关,也与目标距离有关。F1、F2为主、次镜的转速(旋转频率)。
当沿玫瑰线轨迹扫过视场中的目标时,位于系统焦点上的红外探测器接受目标辐射产生的一个目标脉冲,对应的视场为玫瑰线扫描的瞬时视场;当玫瑰线轨迹扫完一个周期,其对应的视场为玫瑰线扫描的总视场(如图8所示)。玫瑰线扫描获得的目标信息是以目标脉冲的形式出现的,而每一个目标脉冲都隐含了一个目标时间ti,ti与目标的方位息息相关,只要把视场中一个目标的方位信息X(t)和Y(t)的信号电压分别叠加到位标器的偏航和俯仰进动线圈上,使之转向X(t)、Y(t)减小的方向,直至X(t)=Y(t)=0时,位标器光轴(视线)对准目标为止。一旦目标偏离光轴(视线),就有X(t)、Y(t)值出现,又“自动”地使之向视线方向转移,实现自动跟踪目标的目的。
3.2.2 抗干扰措施分析
由于玫瑰线扫描目标脉冲的非周期性和多脉冲特性,使得采用一般的相关跟踪和波门选通技术难以解决多目标问题;用一般的模拟电路就更难实现了。一次完整的玫瑰线扫描,可得到目标不同部位处的热辐射信号特征,经过信号处理,即可得到目标的热图像信息,因此,玫瑰线扫描本质上是一种亚成像工作体制。作为一种亚成像机制,玫瑰扫描系统采用瞬时视场扫描总视场,可以实现总视场的空间分解,得到目标的亚图像。结合信号处理技术与计算机技术对图像进行预处理与图像识别,捕获跟踪目标区域,并采用预测跟踪的方式,在预测区域内识别要跟踪的目标,经过运动补偿、估计,控制玫瑰线扫描,可以实现对目标区域的锁定跟踪,将大部分背景和干扰滤除。
3.3 红外成像导引头
3.3.1 工作原理
红外成像制导系统的核心部件是红外成像导引头,一般由红外摄像头、图像处理系统、图像识别系统、跟踪处理系统和摄像头跟踪系统等部分组成,其中图像处理和图像识别子系统是红外成像制导系统的核心。典型的红外成像制导系统如图9所示。
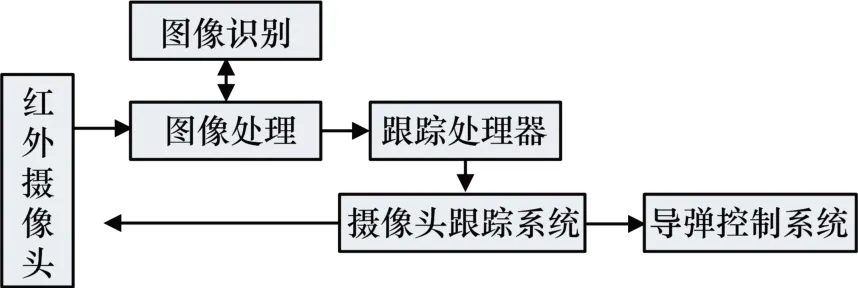
图9 红外目标跟踪系统
红外成像导引头通过探测目标与背景的温差形成红外图像,现今红外成像制导大都采用凝视成像体制。凝视成像采用一个凝视焦平面阵列,其材料为锑化铟或碲镉汞,为两维阵列制导探测象元。这些探测象元都集成在一块硅片上,硅片的另一面是同等数量的红外电荷耦合器件(CCD)。阵列上的每个探测元仅凝视景物的一小部分,所有象元组成阵列的总瞬时视场,阵列的总瞬时视场很大,抓住目标就不会再丢失。由于凝视焦平面阵列采用电扫描法扫描场景,对做大机动飞行的目标也能跟踪。同时,焦平面阵列具有很高的灵敏度,可以探测背景的温差为千分之几度的目标。对来自阵列的热数据采用适当的方法进行数字处理,结果可以得到目标信息和威胁程度的顺序排列。
3.3.2 抗干扰措施分析
红外成像系统对目标、背景、干扰成像后,经过图像预处理、图像分割、图像特征提取、识别,提取该目标的各种特征(包括目标大小、长度、宽度、灰度分布、平均灰度、最大灰度、灰度变化率、运动方向、运动轨迹、运动速度和运动加速度等),采用特定的跟踪算法对目标进行跟踪,采用不同的跟踪算法,就形成了不同的抗干扰措施。典型的抗干扰措施有特征相关匹配跟踪和运动轨迹预测跟踪。
1)特征相关匹配跟踪
特征相关匹配跟踪适用于小目标跟踪和复杂背景或低信噪比条件下的目标跟踪。对于小目标,当存在复杂干扰时,由于没有质心跟踪和模板匹配跟踪所需的目标灰度分布信息,只有运动速度、运动方向和轨迹信息,只能采用特征相关匹配跟踪。特征相关匹配跟踪时,先根据前帧目标运动速度和方向,估计当前帧波门的大小和位置,然后根据前一帧历史数据以及目标特征的连续性和规律性,预测当前帧特征参数,然后在波门内,用以上特征作为匹配参数,寻找匹配误差最小的点作为目标在当前帧的位置。
2)运动轨迹预测跟踪
预测跟踪是根据目标的运动特性,预测目标最可能的运动轨迹,通过轨迹预测实现对目标的准确跟踪,该方法特别适合于目标丢失、目标原有特征消失或目标由于干扰无法识别时使用。常用的预测器有线性预测器,线性预测器的工作原理如下:
设目标位置函数f(t)在N个顺序时刻的测量值为f(ti)(i=1,2,…,N),且f(t)可以用Y=a0+ta1作为最佳线性逼近。
测量值与逼近值之间的误差为:

对N点估计的均方误差为:

最佳逼近即式(3)取最小值。经最小二乘法运算后,得:

式(4)就是f(t)在最小均方误差意义下的N点最佳线性逼近的通解,通过记录目标前面的运动轨迹数据,采用线性预测器可预测目标未来最可能出现的位置,导引头跟踪距预测位置最近的目标,而将其它干扰剔除,从而实现抗干扰。
4 自推进诱饵干扰先进导引头机理分析
4.1 干扰十字叉导引头
从十字叉导引头工作原理可知,十字叉导引头采用波门选通的方式实现抗干扰,传统红外干扰弹运动轨迹与载机差异很大,采用波门选通电路可以很容易剔除干扰;自推进红外诱饵,抛射出去后会伴随载机飞行一段时间,运动轨迹与载机相似,使诱饵与载机同处于波门视场内,从而无法剔除干扰,达到干扰导引头的目的。作用原理示意图如图10-11所示。

图10 波门选通电路剔除传统诱饵原理示意图

图11 自推进诱饵干扰十字叉导引头原理示意图
4.2 干扰玫瑰花扫描和成像导引头
玫瑰花扫描和成像导引头分别属于亚成像和成像制导体制。对于传统红外干扰弹,抛射出去后快速向载机后下方运动,运动轨迹与载机差异很大,采用特征相关匹配跟踪和轨迹预测跟踪算法很容易将干扰剔除;对于自推进红外诱饵,采用特殊的气动外形设计,且具有自推力,可在一定程度上克服重力和风阻,使诱饵可伴随载机飞行一段时间,保证运动轨迹与载机相似,红外辐射特征也与载机相似,因此,可有效干扰具有相关匹配跟踪算法和运动轨迹预测跟踪算法的导引头。轨迹预测作用原理示意图如图12所示。

图12 轨迹预测作用原理示意图
5 结束语
随着十字叉型、玫瑰花扫描、凝视成像等第三代、第四代先进红外制导体制导弹的大量装备,传统红外诱饵已不能满足载机末端防护需求。自推进红外诱饵可逼真模拟载机运动特征和红外辐射特征,能有效干扰先进红外制导导弹,为夺取制空权,提升未来战场战机的末端自卫防护能力,亟需加大自推进红外诱饵的研制和装备步伐。
