绿叶菜耕整作畦机的研制与试验
2021-05-29周春健黄嘉俊成松松唐宁静陈春胜
周春健,黄嘉俊,成松松,唐宁静,陈春胜
(上海市农业机械研究所,上海市 201106)
0 引言
绿叶菜是上海地区产量较大的蔬菜品种,目前上海绿叶蔬菜周年播种面积达5.72万hm2,2017年绿叶菜产量148.9万t达到上海全年蔬菜总产量的47.9%[1]。由于绿叶菜耕种收各个环节机具匹配性较差,绿叶菜生产全程机械化率较低,机具的不配套制约了绿叶菜产业的发展[2-3]。作畦是绿叶菜全程机械化生产的关键环节,畦面质量的好坏影响后续的机械化播种及收获环节[4-5]。上海地区常用的绿叶菜作畦机主要有无锡悦田YTLM系列[6]、韩国璟田作畦机等,此类机型采用成型板完成作畦作业,畦面土质较松软,待绿叶菜成熟收获时,畦面高低不平,不利于后续机械化采收。为解决绿叶菜种植作畦的问题,国内许多学者对作畦机进行了研究。张浪[7]等研制了1LZ-140蔬菜联合精整地机具,可一次完成旋耕、碎土、平整、起垄及镇压作业,特别是碎土辊设计,能满足不同土壤特性的蔬菜整地作业;管春松[8]等研制的蔬菜作畦机可一次完成深层土壤旋耕、表层土壤精整、起畦和畦面镇压等多项工序,试验结果表明不同的机具前进速度和动力输出轴转速对作畦效果影响显著。针对上海地区绿叶菜地土壤情况、种植模式以及绿叶菜生产全程机械化考核指标要求,本文设计一种适合上海地区绿叶菜种植的蔬菜耕整作畦机,可一次完成取土、旋耕、碎土、作畦、镇压作业,为上海绿叶菜生产全程机械化提供配套机具。
1 整机结构及工作原理
1.1 整机结构
绿叶菜耕整作畦机整机主要有取土部件、机架、传动及旋耕刀轴部件、碎土辊部件、限深轮部件、作畦辊部件组成。整机结构如图1所示。

图1 作畦机整机结构简图
1.2 工作原理
绿叶菜耕整作畦机采用三点悬挂方式与拖拉机连接,作畦机作业由拖拉机驱动。作畦机作业过程中,由取土圆盘将土聚拢,拖拉机PTO通过万向节将动力传至旋耕刀轴和碎土辊完成碎土作业,最后由作畦辊部件完成畦面成型、镇压作业。根据绿叶菜种植不同畦面宽度和高度要求,可通过改变取土圆盘角度和高度、限深轮高度以及作畦辊高度,调整取土量以满足不同畦面作业要求,完成耕整作畦。绿叶菜耕整作畦机主要技术参数如表1所示。
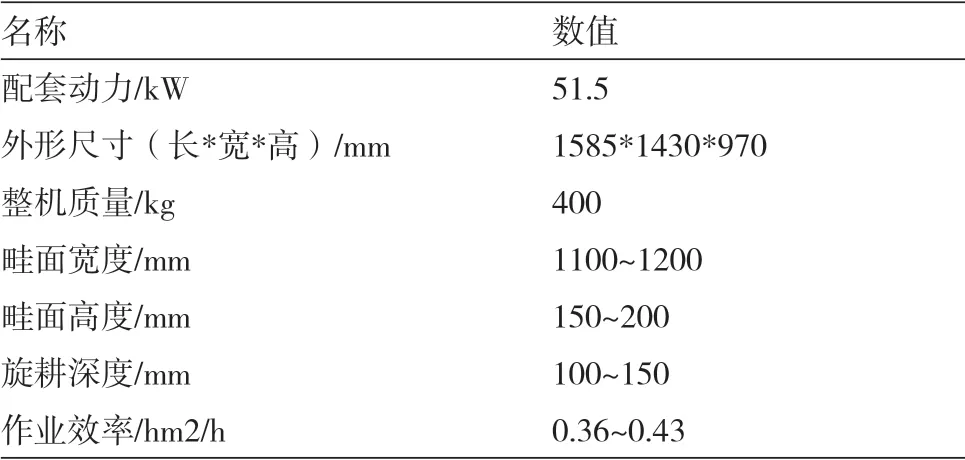
表1 主要技术参数
2 关键部件设计
2.1 取土部件设计
取土部件是绿叶菜耕整作畦机调整取土量的关键部件,取土部件主要由取土圆盘、支架以及刮土板组成,取土圆盘直径410 mm,采用65锰钢制作。取土部件,如图2所示。
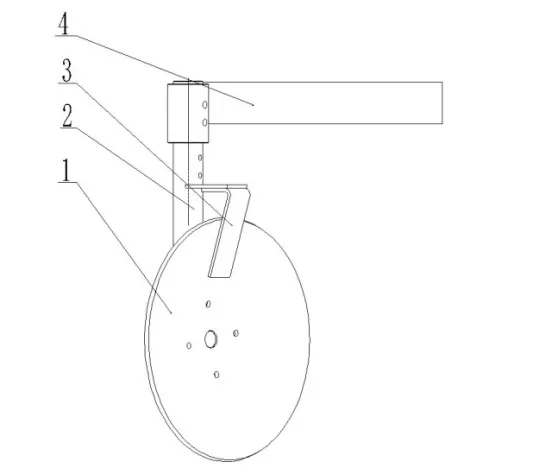
图2 取土部件
取土圆盘支架与机架通过两个紧固螺栓连接,作畦机作业前通过放松紧固螺栓调整取土圆盘的位置以满足作业取土量的要求。作业过程中,取土圆盘在拖拉机前进时自动旋转并向中间取土,初步形成畦面和垄沟,刮土板可及时将粘在取土圆盘上的土壤刮除,保证取土圆盘正常作业。
2.2 传动、旋耕刀轴及碎土辊设计
作畦机旋耕碎土动力由拖拉机PTO输出,通过万向节、中间齿箱、传动轴、旋耕刀轴链条箱,碎土辊链条箱将动力分别传至旋耕刀轴及碎土辊,驱动旋耕刀轴和碎土辊碎土作业,旋耕碎土传动部件如图3所示。
拖拉机动力输出轴转速为540 rpm,图3中Z1、Z2、Z7为锥齿轮,齿数分别为15、24、24,Z3、Z4、Z5、Z6为链轮,齿数分别为15、22、16、14,经计算旋耕刀轴转速为230 rpm,碎土辊转速295 rpm符合旋耕碎土作业要求。

图3 旋耕碎土传动部件
2.2.1 旋耕刀轴设计
作畦机作业质量与旋耕碎土的效果正相关,切土节距与旋耕速比是影响旋耕碎土效果的关键因素。根据旋耕作业相关公式计算机具旋耕速比[9]。

式中,ω为旋耕刀轴角速度取24 rad/s;
R为旋耕刀回转半径取0.21 m;
V为机具前进速度取1 m/s;
λ为旋耕速比。
由式1计算得出λ=5。
绿叶菜地含水量普遍较高且残茬较多,为保证旋耕碎土性能,选择切土节距为90 mm[10],由切土节距公式计算得出单位刀轴圆周上的刀片数量。

式中,S为切土节距,取0.09 m;
R为旋耕刀回转半径,取0.21 m;
λ为旋耕速比,取5;
Z为单位刀轴圆周上的刀片数量。
由式2计算得出Z=3。
通过对旋耕刀轴转速、旋耕速比、切土节距、单位刀轴圆周上的刀片数量的设计计算,得出绿叶菜耕整作畦机旋耕作业部件设计的参数较合理。
2.2.2 碎土辊设计
碎土辊是对旋耕后的土壤进行二次粉碎的主要部件,主要有滚筒和刀齿组成,如图4所示。刀齿共有7排均布于滚筒圆周上,相邻两排刀齿轴向错位,相邻刀齿间距97 mm。通过碎土辊对旋耕后的土壤二次碎土后,表层土壤更加细碎,利于机具作畦作业。
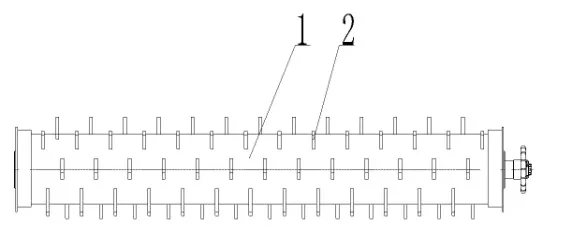
图4 碎土辊
2.3 限深轮部件设计
限深轮部件是调整畦面高度,控制畦面成型土量的关键部件,主要有地轮、地轮支架、横梁、地轮调节臂组成,如图5所示。作畦机作业前,通过调节地轮调节臂的长度将限深轮高度调整至合适位置控制畦面成型土量以满足畦面土量要求。
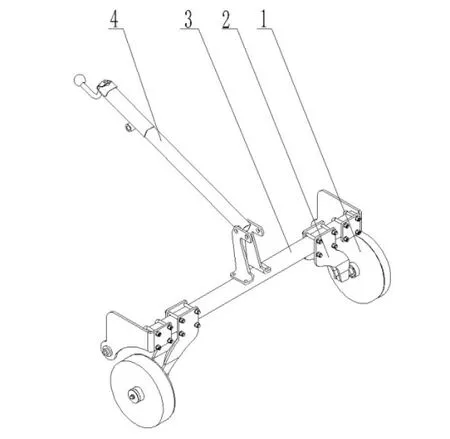
图5 限深轮部件
2.4 作畦辊部件设计
作畦辊是作畦机畦面成型的关键部件,通过将旋耕过的土壤进行成型、镇压完成作畦作业。作畦辊部件主要有作畦轮轴、作畦轮侧板、作畦轮支臂、液压马达组成,如图6所示。
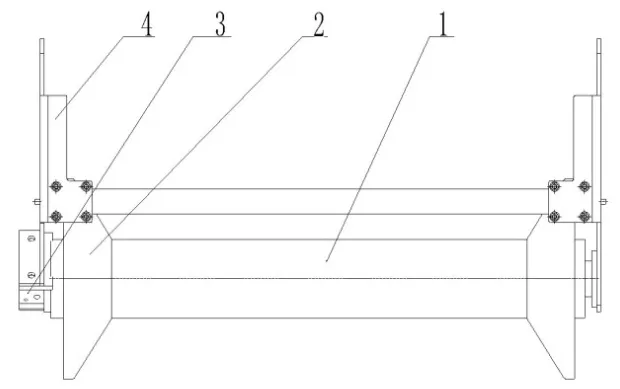
图6 作畦辊部件
液压马达与作畦轮支臂通过螺栓连接,液压马达动力输出轴与作畦轮轴相连,作畦轮侧板通过螺栓固定于作畦轮外圆。作畦机作业过程中可按照绿叶菜种植畦面要求,调整作畦轮侧板位置,调整畦面宽度。液压马达动力由拖拉机液压后输出提供,管路中装有流量调节阀,通过流量调节阀可调节液压油流量控制作畦轮轴转速以满足畦面作业要求。
3 机具田间试验
3.1 机具试验条件
太仓与上海毗邻,土壤情况与绿叶菜种植模式和上海相近,课题组选取太仓鹿杨蔬果生产专业合作社作为试验基地。2020年12月在鹿杨合作社进行了绿叶菜耕整作畦机试验。试验蔬菜田长120 m,宽60 m,土壤0~5 cm湿度16.5%,试验动力为久保田704拖拉机,拖拉机慢二档作业,作畦机田间试验如图7所示。

图7 田间试验
3.2 试验依据
根据GB/T 5668-2017旋耕机械、JB/T8401.2-2017旋耕联合作业机械的试验方法,对畦面高度稳定性及合格率、畦面宽度稳定性及合格率进行测试。
3.2.1 畦面高度稳定性及合格率
作畦完成后,随机选取3个行程,用铁皮尺测定畦面高度。测定时,沿机组前进方向每隔2 m测定一点,每个行程各测定5点,记录数据,计算平均值、稳定性系数及合格率。绿叶菜种植畦面农艺要求高度15 cm,畦面高度12~18 cm为合格,合格畦面高度数量占总测定畦面高度数量的百分比为合格率。
3.2.2 畦面宽度稳定性及合格率
畦面宽度及稳定性及合格率测定方法同畦面高度稳定性及合格率测定方法。绿叶菜种植畦面农艺要求宽度120 cm,畦面宽度117~123 cm为合格。
3.3 试验结果
3.3.1 畦面高度稳定性及合格率
作畦试验后,根据试验方法将试验数据记入表2。从表2的数据得出作畦机畦面高度稳定性系数94%,合格率100%,符合GB/T 5668-2017旋耕机械、JB/T 8401.2-2017旋耕联合作业机械的标准。
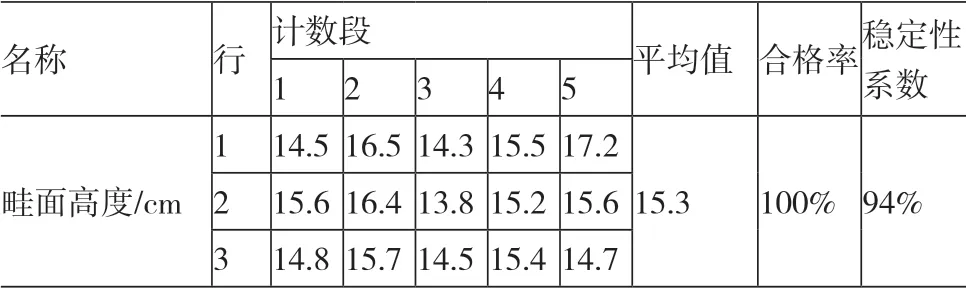
表2 畦面高度
3.3.2 畦面宽度稳定性及合格率
作畦试验后,根据试验方法将试验数据记入表3。从表3的数据得出作畦机畦面宽度稳定性系数99%,合格率100%,符合GB/T 5668-2017旋耕机械、JB/T 8401.2-2017旋耕联合作业机械的标准。
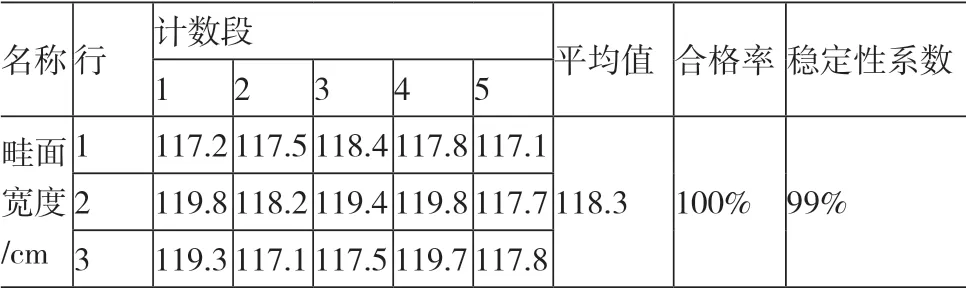
表3 畦面宽度
4 结语
根据绿叶菜种植农艺要求,设计一种取土、旋耕、碎土、作畦、镇压为一体的绿叶菜耕整作畦机。通过调节取土圆盘位置及限深轮高度,使取土量符合畦面成型土量要求,同时拖拉机前进速度与旋耕刀轴转速匹配,旋耕碎土性能较好,表层土壤通过碎土辊二次粉碎,表层土壤更加细碎,碎土通过作畦辊作业完成畦面成型,畦面紧实度适合绿叶菜机械化播种和收获作业。田间试验表明该机平均畦面高度15.3 cm,平均畦面宽度118.3 cm,畦面高度稳定性系数94%,合格率100%,畦面宽度稳定性系数99%,合格率100%,畦面质量符合上海绿叶菜生产全程机械化要求。机具作业过程中,未发生土壤拥堵、菜茬缠绕旋耕刀轴现象,机具通过性能良好。
