一种永磁同步电机最大转矩电流比控制方法*
2021-05-26李玮刘超梁海强
李玮,刘超,梁海强
(北京新能源汽车股份有限公司 工程研究院,北京 100176)
前言
纯电动汽车通过电机驱动车轮转动来实现车辆行驶,电机驱动及控制作为纯电动汽车的核心对整车性能影响重大,因此成为国内外各大纯电动汽车厂商研究的重点[1-2]。随着永磁材料、电力电子技术、控制理论、电机制造以及信号处理硬件的发展,永磁同步电动机(PMSM)得到了普遍应用,在永磁同步电机中,内置式永磁同步电机(IPMSM)具有机械强度高、磁路气隙小、电枢反应强等优点,被普遍应用于纯电动汽车驱动系统。永磁同步电机在基速以下,一般采用最大转矩电流比(MTPA)控制,最大转矩电流比控制又称定子电流最小控制,是指在转矩给定的情况下,最优配置交直轴电流分量,使定子电流最小,即单位电流下电机输出扭矩最大,该控制方法可以减小电机铜耗,提高运行效率,并且由于逆变器所需输出的电流较小,对逆变器的容量要求可相对降低。
在纯电动汽车领域IPMSM控制中,若要提高控制精度,需要考虑电感饱和效应的影响,但目前国内纯电动汽车厂商的普遍做法为将IPMSM电机D轴与Q轴的电感当作定值处理,忽略饱和效应,但这样做势必会对控制性能造成影响[3-6]。针对该问题,本文提供了一种适用于装备内置式永磁同步电机纯电动汽车的最大转矩电流比控制方法,该方法以查表法为基础,即前期通过公式推导与台架、实车试验等方式确定电机输出扭矩与D、Q轴电流的关系,并制成表格,用于电机控制过程中的实时查询;另外该方法考虑了电感饱和效应的影响,当Q轴电流增加到一定程度磁路饱和时,对Q轴电感进行补偿,在此基础上得到新的输出扭矩与D、Q轴电流的关系,并用于电机控制。该方法在保证控制实时性需求的前提下,考虑了电感饱和效应对控制的影响,为提高电机控制性能奠定了坚实的基础。
1 内置式永磁同步电机控制
纯电动汽车永磁同步电机最大转矩电流比控制在电机核心控制中所处的位置见图1。

图1 电机控制框图
如图1所示,电机核心控制包括三部分,分别为电流管理控制、电流环控制及SVPWM控制。其中电流管理控制实现的功能为根据输入的扭矩命令T输出D轴及Q轴电流命令Id与Iq,电流管理控制包括弱磁控制及最大转矩电流比控制,当电机转速在基速以下是采用最大转矩电流比控制,当电机运行在基速以上转速区间时需要弱磁控制介入;电流环控制实现的功能为根据电流管理模块输入的命令电流Id、Iq与电机实际反馈的D、Q轴电流Id*、Iq*经电流环控制(一般采用PI控制)及解耦后得到D轴及Q轴电压命令Ud与Uq;SVPWM控制实现的功能为将D、Q轴电压命令Ud、Uq转化为电机U、V、W三相绕组的驱动电压占空比,从而将两相电压命令值转换为对电机三相绕组电压值的精确输出,最终驱动电机。
从图1中可以看出,电流管理控制作为电机核心控制中的第一个环节,其计算的D、Q轴电流命令将对电机控制的性能、精度产生影响,而最大转矩电流比控制是电流管理控制的重要组成部分,因此其控制的优劣将对整个电机系统产生巨大的影响。
2 最大转矩电流比控制
内置式永磁同步电机电磁转矩方程为:

式(1)中Te为转矩命令;np为极对数;φf为永磁体磁链;Ld为D轴电感;Lq为Q轴电感;id为D轴电流;iq为Q轴电流。
最大转矩电流比控制D、Q轴电流方程为:


根据式(2)(3),当给定转矩命令则能够求解出一组D、Q轴电流,但由于以上公式的计算量极大,在电机控制中一般不进行直接计算,目前工程化中普遍采用的方法为查表法,即通过前期试验或模拟仿真得到命令扭矩Te与D、Q轴电流的关系,并以表格的形式存储。在实际的控制过程中,当给定扭矩命令后,通过查表的方式可迅速得到D、Q轴电流指令,并直接用于后续控制。
查表法具有速度快的优点,但没有考虑磁路饱和的影响。内置式永磁同步电机的参数会伴随运行工况的不同而发生变化,当磁路发生饱和时,电机的电感会发生变化,前面提到的解析方程(2)(3)在实际中会受到一定限制,进而影响电机的控制性能。针对该问题本文在合理简化的基础上给出一种解决方法。
3 考虑磁路饱和的MTPA控制
在内置式永磁同步电机中,Q轴对应的等效气隙较短,容易发生饱和,而D轴对应的等效气隙较长,不容易发生饱和。在大量研究数据表明,D轴电感随Q轴电流的增加变化较小,因此在解析方程(2)(3)中可认为Ld恒定;而磁路饱和时Q轴电感随Q轴电流的增加变化较大,且呈非线性关系,因此,在以上合理假设的基础上仅考虑Q轴电流对Lq的影响,这样一来大大地简化了问题处理难度。
考虑到磁路饱和时Q轴电感随Q轴电流的增加变化较大,因此首先通过实验手段确定Lq与iq的变化曲线。由于Lq与iq之间为非线性关系,接下来对该曲线进行分段线性化处理,分段数目为N。之后针对这N段曲线通过台架试验、仿真计算等方法确定扭矩命令Te与D、Q轴电流id与iq之间的关系,并存储在表格中,共N张表,在最大转矩电流比控制过程中根据iq电流的变化变换扭矩命令Te的查询表格,得到D、Q轴电流命令,最终实现考虑磁路饱和的最大转矩电流比控制,具体见图2。
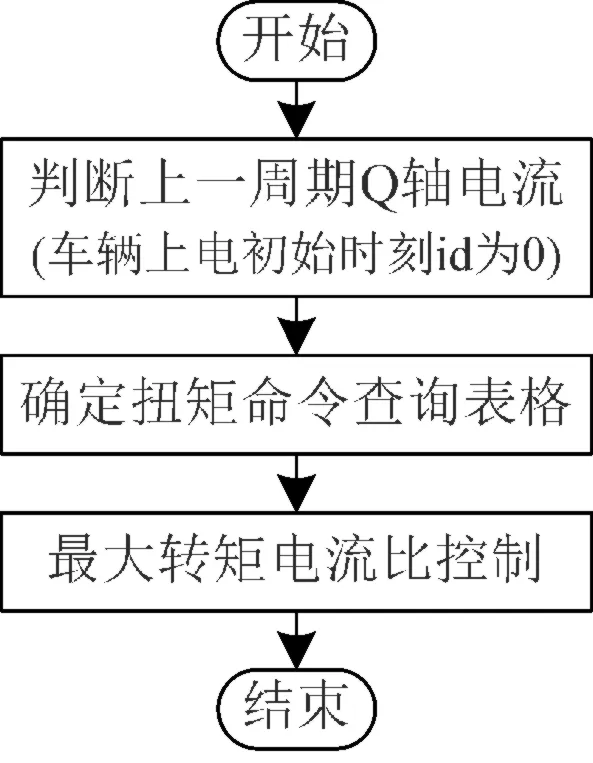
图2 最大转矩电流比控制
如图2所示,首先判断上一周期的Q轴电流命令,并根据上一周期的Q轴电流命令确定扭矩查询表格,之后利用该表格及命令扭矩值直接查询得到D、Q轴电流命令。该方法中的扭矩查询表格为事先制作完成,因此只需要命令扭矩值与上一周期的Q轴电流值就能够快速唯一的确定一组D、Q轴电流命令,从而保证系统的实时需求。在实际控制过程中,扭矩查询表会根据Q轴电流的变化进行切换,为了保证电机最终输出扭矩的平顺性,扭矩查询表不应该频繁切换,为此需加入滞回策略,具体如图3所示。
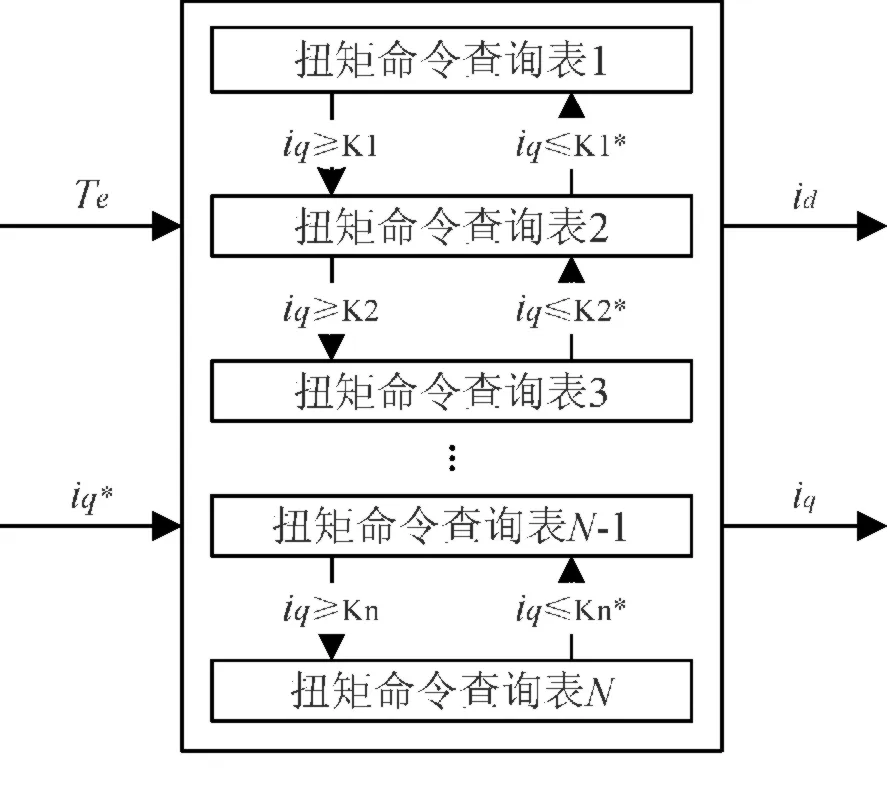
图3 扭矩表格查询策略
根据图3,输入量为扭矩命令与上一周期Q轴电流命令iq*,输出为D、Q轴电流命令。在实际控制过程中,假设初始阶段采用扭矩命令查询表1进行最大转矩电流比控制,当Q轴命令电流增大到阀值K1时,则采用扭矩命令查询表2进行最大转矩电流比控制,若之后Q轴命令电流减小,当低于阀值K1*时则重新采用扭矩命令查询表1进行最大转矩电流比控制,其中K1大于K1*。从扭矩命令查询表1到扭矩命令查询表N,以此类推。图3所示的方法引入了滞回策略,防止由于Q轴电流小范围波动而导致扭矩命令查询表频繁切换,进而影响控制效果。
4 台架试验
针对本文所提出的控制方法进行台架试验验证。
以某品牌纯电动汽车驱动系统为依托开展台架试验,该驱动系统采用内置式永磁同步电机,其峰值输出功率为160kW,峰值扭矩为300Nm。在电机基速点以下转速开展试验,保证系统处于MTPA控制区间,无弱磁控制电流。
利用上位机分别在规定时间5s内给出两组变化的扭矩指令,第一组为100Nm至170Nm的线性变化扭矩指令,第二组为200Nm至250Nm的线性变化扭矩指令。图4为采用常规MTPA控制的电机实际输出扭矩,图5则为采用本文提出的考虑磁路饱和MTPA控制的电机实际输出扭矩。可以看出采用本文所提出的控制方法扭矩波动明显较常规方法小。根据实验结果可以看出在大扭矩工况下(200Nm-250Nm扭矩指令区间段),由于D、Q轴电流增大,MTPA控制受磁路饱和的影响加剧,电机动力输出的平顺性受到影响,采用本文所提出的控制方法能够明显的改善这种情况,其中在200Nm-250Nm扭矩指令区间段能够有效地将扭矩波动控制在10Nm以下,改善了系统性能。
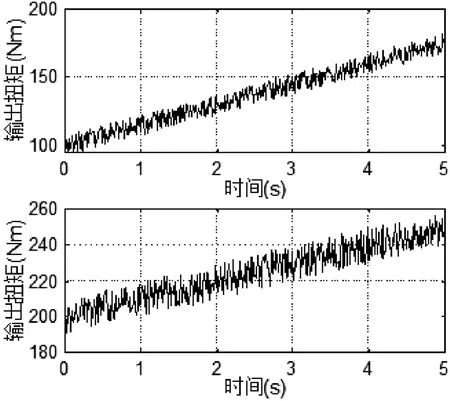
图4 传统MTPA控制
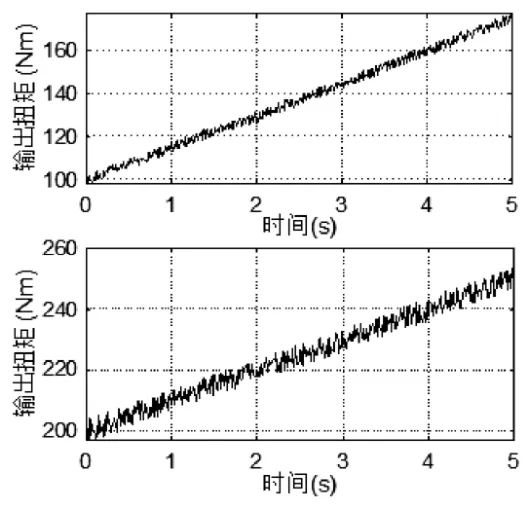
图5 考虑磁路饱和的MTPA控制
5 结论
本文提出了一种最大转矩电流比控制方法,该方法以查表法为基础,并考虑了电感饱和效应对控制性能的影响。本文根据合理假设,仅考虑Q轴电流对Q轴电感的影响,简化了磁路饱和问题处理难度,在此基础上对呈非线性关系的Q轴电流与Q轴电感进行分段线性化处理,并针对每段线性化区间建立扭矩命令与D、Q轴电流命令的对应关系表,在电机最大转矩电流比控制过程中,结合上一周期的Q轴电流与扭矩命令,通过查表的方式迅速地得到D、Q轴电流命令。该方法考虑了电感饱和效应对控制性能的影响,为提高电机控制性能奠定了坚实的基础,同时计算量低,能够满足电机控制的实时性需求,另外在查表过程中引入了滞回策略,防止由于Q轴电流小范围波动而导致扭矩命令查询表频繁切换,进而影响控制效果。最后通过台架试验对该方法的可行性及有效性进行了验证。