Ka/ku双频段卫通船载站跟踪精度外场测量研究∗
2021-05-25
(中国人民解放军91404部队 秦皇岛 066001)
1 引言
当今天线技术开发领域最活跃的便是可用于陆地、海洋和机载应用的移动玉星天线技术[1]。移动卫星通信的优势体现在普通的通信手段难以实现的地方[2~4]。地球同步卫星都处于赤道上方,相对地球静止不变,船载卫通地球站需时刻保持动中通状态,要求伺服系统能够根据信标信号时刻保持天线对准卫星,当卫通地球站载体发生位移或者姿态变化时保持通信链路稳定就需要用天线跟踪精度指标来衡量,因此天线跟踪系统的跟踪精度测量技术就显得尤为重要。
船只在运动过程中,姿态和位置频繁变化,跟踪系统通过获取船体航向、航姿和位置信息进行计算调整,当地球站天线收到遮挡时,信标信号会出现短暂失锁,伺服系统会根据最后一次正常接收信标信号的天线姿态进行小范围搜索,采用波束倾斜跟踪或程序引导步进跟踪方式实现对卫星的自动跟踪[5]。方位和仰轴记忆跟踪由各轴的速率陀螺经数字积分构成空间位置量,将天线指向锁定在惯性空间位置上[6~8]。为了保证跟踪精度天线要解决的最关键的技术是伺服系统能很好地隔离船体的运动所带来的各种扰动[9~10]。针对伺服跟踪系统设计结构和算法的不同跟踪精度的测试方法有所差异,本文采用一种通用性较强的电平跌落法进行跟踪精度外场测量研究,包括测试环境设计和数据采样研究。
2 跟踪精度的测试方法比较
跟踪精度指标和研制成本基本决定了卫星动中通跟踪系统结构设计,根据不同的跟踪结构设计决定了可采用的跟踪精度测试方法。单脉冲自跟踪和部分圆锥扫描跟踪方式主要采用误差电压法进行跟踪精度测试,通过采集接收机输出的误差电压进行跟踪精度的评估[11],测试不需要额外的仪器仪表,测试结果精度较高,但该伺服跟踪方式设计成本较高,为了降低设备研制成本和结构复杂度,单脉冲跟踪方式已经很少被卫通设备研制单位使用,采用指向跟踪方式设计跟踪系统,只需要通过自身的位置和姿态信息就能控制伺服系统实时跟踪卫星。由于不需要输出天线对星方向产生误差电压,所以不适合采用误差电压法进行测试。采用指向跟踪设计的伺服系统可采用电平跌落法进行跟踪精度测试,利用频谱仪等仪器仪表采集信标接收电平来评估跟踪精度,电平跌落法测试通用性好,也适用于单脉冲跟踪方式的天线跟踪精度测试。
3 测试环境设计
当前国内主流的ka/ku双频段船载动中通天线的口径约0.6m~2.1m,需达到的跟踪精度约在0.1°~0.4°之间,跟踪精度对跟踪系统的要求高。由于本文测试的卫通船载站跟踪方式采用非单脉冲跟踪方式,因此,采用电平跌落法来设计测试天线的跟踪精度。
为了更好地评估整套卫通站的跟踪性能,天线稳定信号源采用系统自身的惯导进行支撑,天线安装在摇摆台上,在纵横摇摆状态下进行测试。本文陪试设备包括摇摆台1套,测试PC机(安装天线状态数据录取软件1套)1台,频谱分析仪1台,按照图1连接参试设备和相关仪表。测试PC机用于采集ACU输出的俯仰、方位及夹板角等姿态信息,频谱分析仪用于采集天线接收的信标电平。设置天线可在以下条件下正常跟踪:横摇角为±20°,周期为5s;纵摇角为±6°,周期为7s。要求天线跟踪精度应满足 ≤1/8半功率波束宽度。
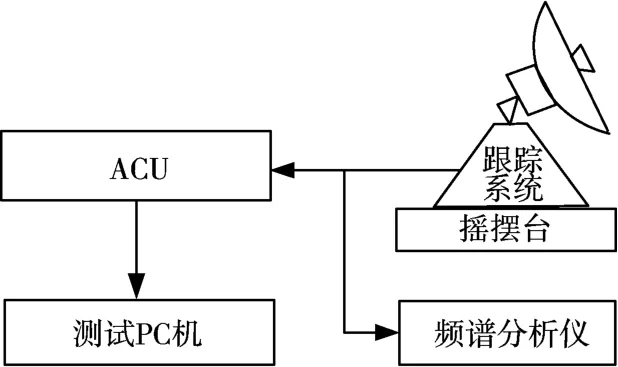
图1 天线跟踪精度测试系统连接图
4 测量和计算方法
指向跟踪系统的信标电平测量主要通过静态测量和动态测量两个过程,图2给出了基于摇摆台信标电平和跟踪精度测试的典型流程。
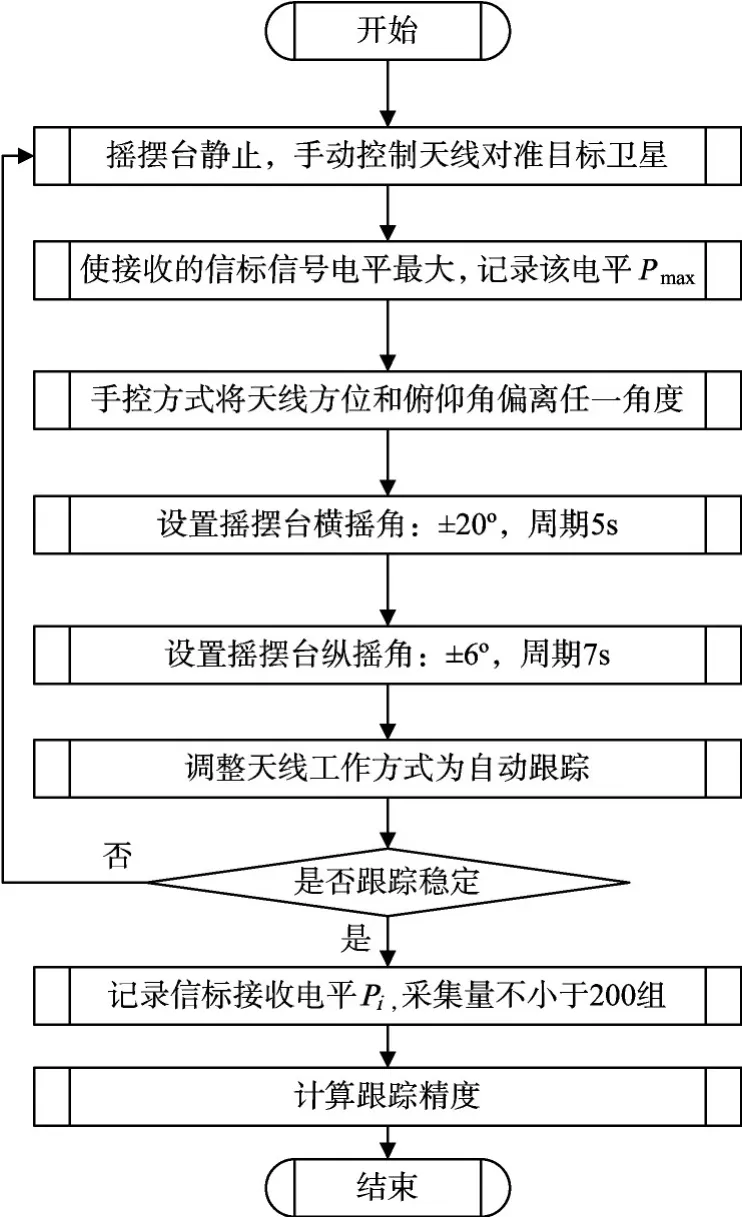
图2 电平跌落法跟踪精度测量流程
将ka/ku双频段船载卫通站天线放置于摇摆台上,摇摆台静止不动,手动控制天线对准目标卫星,使接收信号最强,用频谱分析仪采样记录接收信标的电平值,记录不少于200组;设置摇摆台横摇角度为±20°(周期5s),设置摇摆台纵摇角度为±6°(周期7s),按照设置的摇摆角度和摇摆周期,使天线处于摇摆状态;调整天线工作方式为自动跟踪,跟踪稳定后,记录信标信号接收电平Pi,数据采集量不小于200次;半功率波束宽度可采用式(l)进行计算:

式中C为电磁波空间传播速度,D为卫通天线直径,f为工作频率。工作频段为Ku频段,f=12.5GHz,船载卫通天线尺寸D=1800mm,取C=3×108m/s,通过式(1)计算出船载天线半功率波束宽度约为0.93°。对如此小的波束宽度,在姿态频繁变化的情况下天线对卫星的跟踪难度很高,极易导致天线在跟踪卫星的过程中丢失目标,从而造成通信中断,对卫星的重新捕获也因为天线波束宽度窄而较为困难[12]。
按照式(2)~式(5)将电平跌落值归一化,并计算指向跟踪精度σp(RMS)。
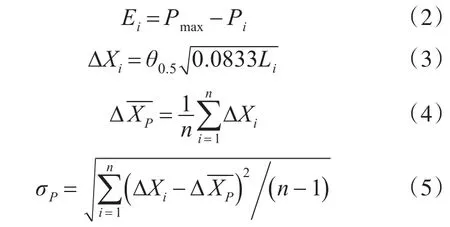
式中Pmax为天线指向卫星时的最大接收信号电平,Pi为天线在指向跟踪方式下的即时接收信号电平,n为数据采样量(不小于200组),σp为指向跟踪精度(RMS)。
5 数据采样分析
5.1 Pmax取值分析
从理论上分析,在摇摆台保持水平静止不动时手动控制天线对准目标卫星,此时天线接收到卫星的信标电平最大,实际测试范围在-85.7401dBm~-85.6254dBm之间,Pmax取值应在此时的数据中选取,但在外场实际测试环境中受天气、其他信号干扰等外界环境影响,当摇摆台处于摇摆状态,天线处于自动跟踪,且跟踪稳定后偶会出现比摇摆台静止不动时大的信号电平,测试结果如图3所示,范围在-86.0406dBm~-85.5911dBm之间,所以Pmax取值应在摇摆台静止不动和处于摇摆状态下录取的所有数据中取200组最大值取平均,即Pmax=Avg[top(静态测试数据+动态测试数据),200]。
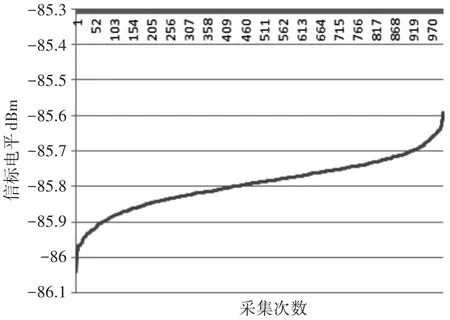
图3 动态测试信标测试电平值
5.2 信标电平Pi取值分析
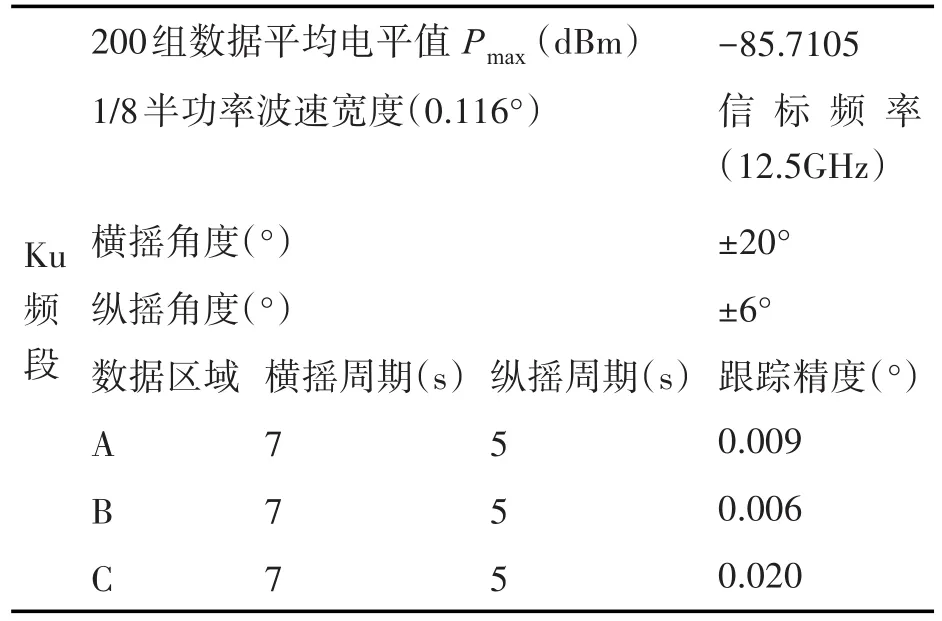
摇摆台按设计的纵横摇角度和周期处于摇摆状态下,待稳定跟踪后,录取1000组数据的信标电平值如图4所示,由于电平跌落值Li=Pmax-Pi,所以Pi应取小于Pmax的值,取值数据集应为P["信标电平"]=select*from[“信标电平”]where[“信标电平”] 图4 Ku频段接收信标电平值 实测信标频率为12.5GHz,计算得到Pmax值为-85.7105dBm,1/8半功率波速宽度为0.116°,根据式(2)~(5)计算结果如表1所示,B区域跟踪精度最高,C区域跟踪精度最差,图4可以看出接收信标电平值的平坦度是B>A>C,跟踪精度值B>A>C区域。 表1 天线跟踪精度测试结果 综上所述,在同一条件下采用电平跌落法处理卫通天线的跟踪精度值与接收信标电平值的平坦度相关,接收信标值曲线越平坦精度越高,反之就越低。 船载站的卫通天线对星主要是依靠惯性导航系统所提供的实时位置参数和实时姿态等参数,所以,惯导的精度及响应速度对整个天线系统指向精度的影响至关重要[13];另外天线对卫星的跟踪精度还与天线罩对天线方向图的畸变效应而造成的跟踪误差有关。在外场采用电平跌落法进行天线跟踪精度测试,信标电平的采样区间对测试结果的影响较大,从算法公式的理解可以看出,电平跌落法测试结果取决于天线指向斜率的变化度,与信标理论位置关系不大,因为卫星在轨的实际位置也会有偏移,与理论位置有一定偏差,电平跌落法体现的是天线对某一个方向的跟踪稳定度,论文提出的采用电平跌落法测量天线跟踪精度测试方法和数据采样规律,具有更好的实践性,对指导后续采用该方法进行船载动中通卫通天线跟踪精度外场测试具有一定的借鉴意义。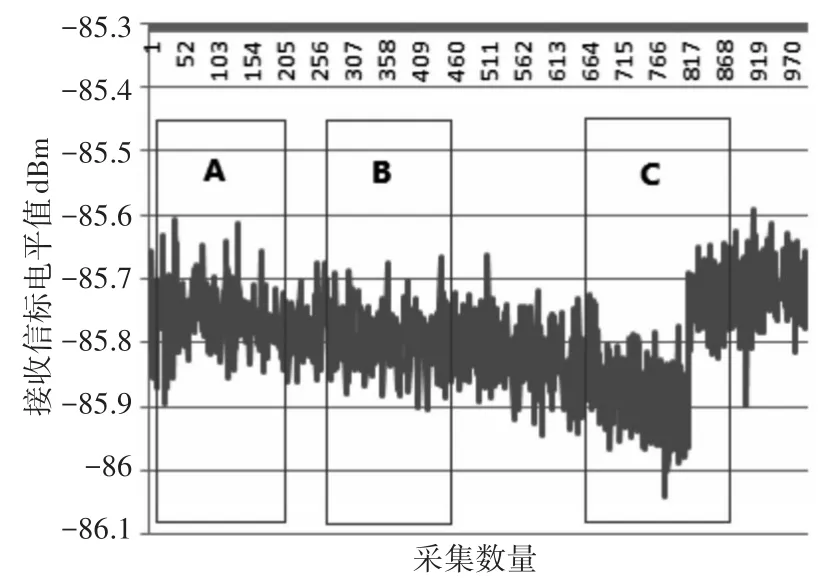
6 结语
