RTK在机动式脉冲雷达寻北定向中的应用∗
2021-05-25
(91913部队 大连 116041)
1 引言
在新型号武器系统试验的跟踪测量过程中,单脉冲跟踪测量雷达应该满足跨区域、全天候、快速机动、联合测量要求。按照精密测量雷达精度要求,雷达进入阵地后先要进行寻北定向。目前,地面雷达寻北定向通常采用望远镜、经纬仪等仪器的光学测量法[1~2],即方位标法,尽管测量精度高,但严重限制机动部署,增加保障难度。一是必须事先在场坪周围架设方位标设施,且有精确的大地测量成果,增加了额外的基础设施建设成本;二是方位标的选址、测量及建设受地理环境影响很大,试验航区所要求部署阵地基本在偏僻海边或山区,无合适方位标架设点;三是观察方位标时受光线、大气扰动等环境因素的影响,尤其是在夜间、雨雾天气中甚至无法观察。
针对当前单脉冲跟踪测量雷达寻北定向过程中所存在的不足,本文采用全球定位系统实时载波相位差分技术(RTK),通过分别架设基准站和移动站的两个GPS/BD天线,获得以两个GPS/BD天线连线为基线的偏北角,完成雷达快速寻北定向,满足单脉冲跟踪测量雷达跨区域、快速机动部署和联合参试的需求。
2 机动式脉冲雷达寻北定向需求
在靶场测控系统中,为获得高精度的测量数据,在执行跟踪测量任务前后,应当进行雷达标校,获得雷达轴系误差、定向灵敏度、方位零值、俯仰零值、距离零值的系统修正数据,雷达系统会根据标校得到的各项误差数据,对雷达系统的外测数据进行实时和事后修正。脉冲雷达事后数据处理方法中[3~5]明确的系统误差标定与校正如式(1)所示:
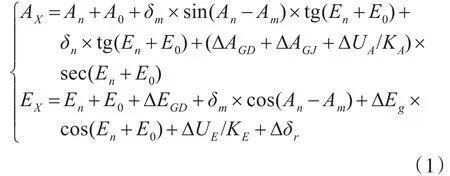
式中各参数具体含义见表1。
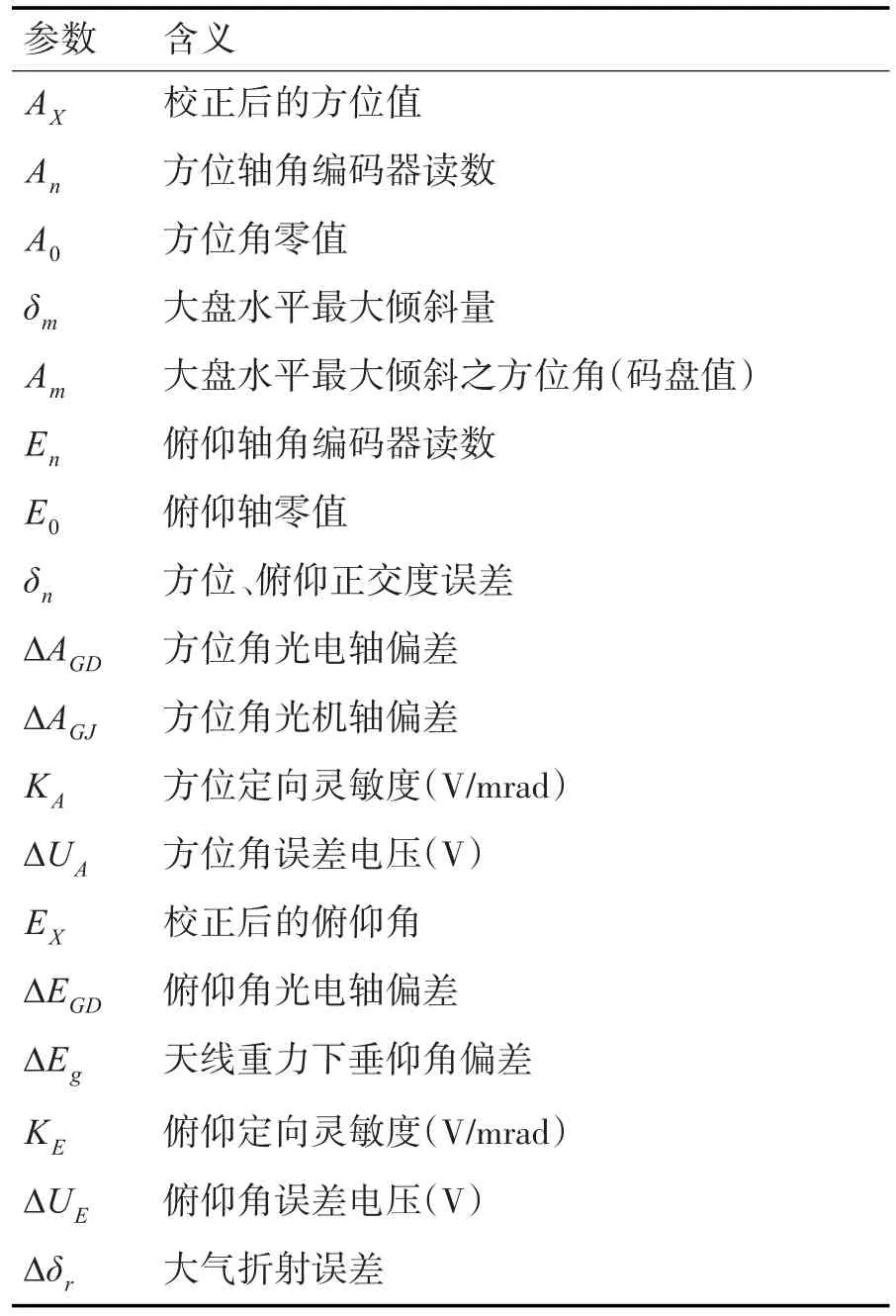
表1 脉冲测量雷达数据处理系统误差标定与校正公式参数定义
对于机动式单脉冲跟踪测量雷达装备,在需要紧急执行测量任务或其它联合测量任务情况下,临时指定阵地往往不具备预埋基础和周边方位标架设,因此在无方位标条件下应具备跟踪测量任务的能力,满足跟踪数据精度要求,必须在任务前准确进行寻北定向,使方位零值误差达到最小。
3 基于RTK技术GPS/BD双天线定向原理
3.1 原理概述
基于RTK实时相对定位技术GPS/BD双天线定向原理采用伪距差分和RTK相结合的组合定位方法,以两个天线的相位中心为基线,GNSS接收机实时测得相对于基点的载波相位及位码相位、伪距等原始测量,馈送到定向处理单元,主站(基准)定位处理单元同时实时接收子站(移动站)转发的测量信息,综合运用伪距差分和RTK两种方法,获得高精度的相对定位原始结果,此结果经过滤波处理、坐标转换后输出给显示系统,同时处理器中定向算法通过利用接收机发过来的信息及根据卫星接收天线间距离不变的条件求解两点连线与真北的夹角。实时定位原理如图1所示。
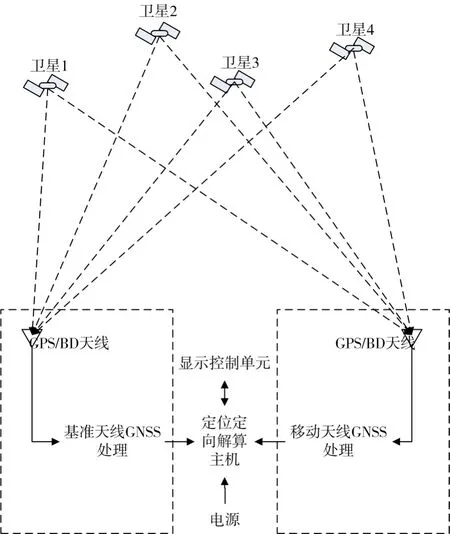
图1 RTK实时相对定位原理
3.2 定位解算数学模型
GPS/BD定位误差主要包括卫星轨道误差、卫星钟差;电离层效应、对流层效应和多路径效应影响;接收机的噪声误差、时间延迟等[6]。RTK实时相对定位技术GPS/BD双天线定向主要利用两点GPS/BD定位的空间相关性,通过差分技术来抵消掉公共误差部分,提高GPS的定位准确度,从而提高定向准确度[7~8]。
利用GPS进行高精度测量采用载波相位形成双差方程,这样可以消去电离层、对流层、接收机钟差等对参数的影响,方便数据处理。双差方程数学模型如式(2)所示:
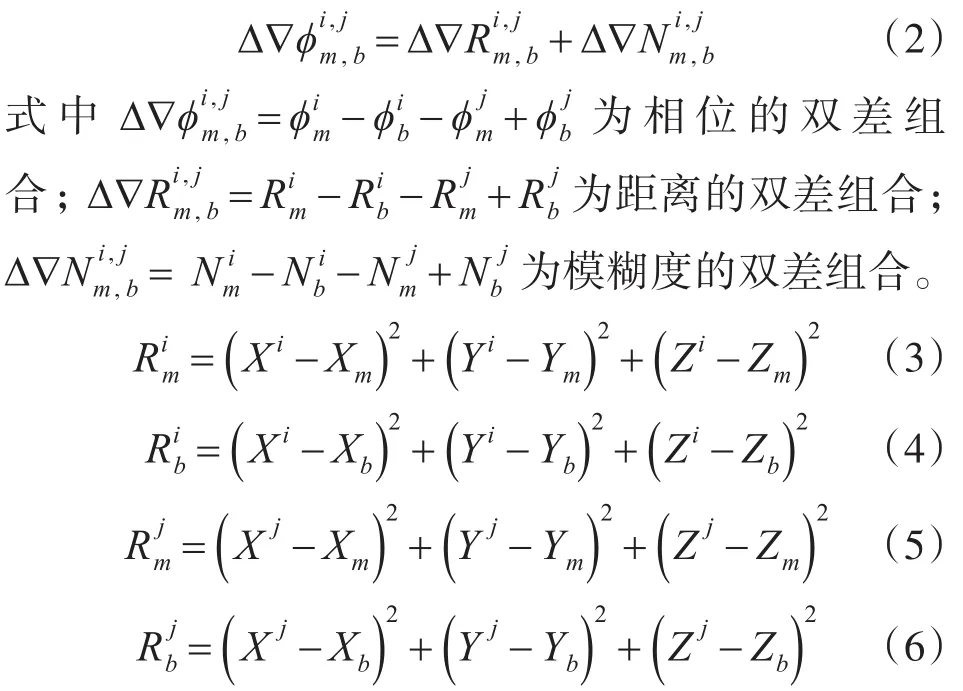
式中,(Xi,Yi,Zi)为卫星i的位置,根据导航电文进行解算;(Xj,Yj,Zj)为卫星j的位置,也根据导航电文进行解算;(Xb,Yb,Zb)为主站(基准站)的位置,测量定位解算;(Xm,Ym,Zm)为子站的位置,测量定位解算。其中主(基准)天线和子天线坐标关系,如图2所示。
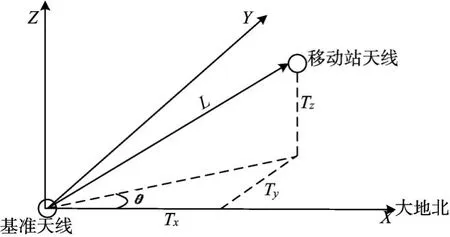
图2 基准天线和子天线坐标关系
主站(基准站)和子站通过解算出准确位置后,子站相对主站(基准站)在WGS84坐标系下的坐标差为如式(7)所示:
然后计算出在主站(基准站)站心坐标下的坐标差数学模型,如式(8)所示:
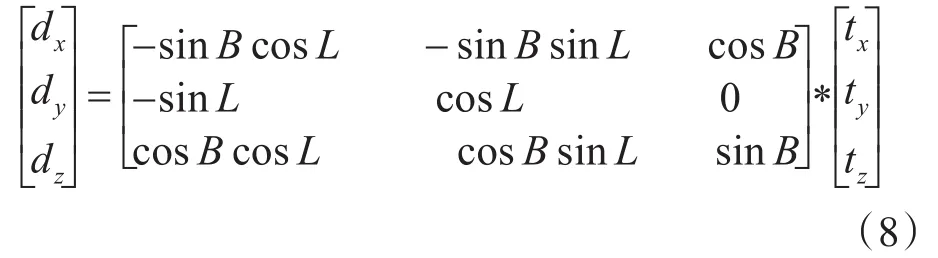
式中B,L为主站(基准站)的经纬度位置。由式(6)可以计算方位角,即A0=θ,如式(9)所示:
4 基于RTK技术GPS/BD双天线定向方法
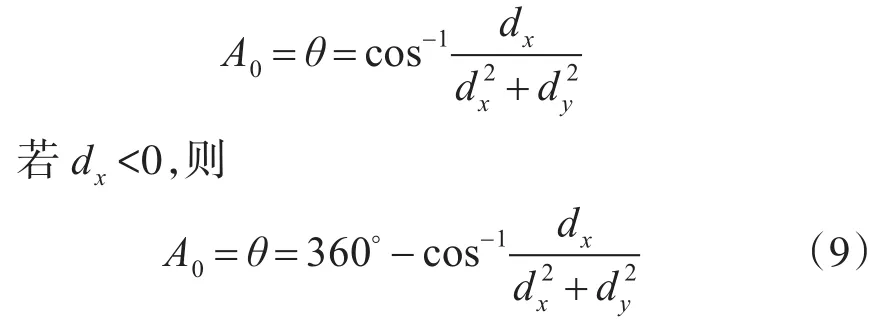
RTK技术作为GPS系统中高效定位方法之一,在各种测量领域中有着无比的优越性[9~10],动态实时测量,工作效率高;定位精度高,没有误差积累;自动化作业、可全天候工作[11~12]。本文将单脉冲测量雷达CCD标校望远镜与GPS/BD天线有效结合,借助CCD标校望远镜的视场手段,直接对光轴方向进行寻北定向,就是让天线缓慢旋转使天线望远镜和GPS双天线的基线在同一直线上来确定偏北的方向。方法实现流程如图3所示。
图3 寻北定向操作流程图
1)雷达天线车展开、不水平度调整
雷达进入指定阵地,天线车拆掉运输保护装置并将前部手动支腿落地,半挂车和牵引车分离,按照天线车展开程序完成天线车落座(有预埋地基座)和不落座(无预埋地基座)工作状态。利用电子水平仪完成天线座大盘不水平度的测量与调整,若测得的天线座大盘水平度误差最大值大于20″,通过在天线基座与预埋基座间加垫片(天线车落地展开)或调整天线车的调平支腿(天线车不落地展开)对天线座大盘水平度进行调整,然后再重新测量天线座大盘水平度,直至满足要求。
2)GPS/BD寻北定向设备安装、双天线定位
在距离位于雷达天线约50m~100m处(视场地情况而定)架设定向设备,场地空旷、平坦、无遮挡,主要包括定向设备供电线缆连接、基准天线和移动天线连接。
雷达CCD标校望远镜加电,伺服加电并转动天线,保证天线俯仰未处于限位角度,通过监视器观察架设GPS天线。首先确定基准GPS天线的位置,转动基准GPS天线使其在监视器的CCD望远镜视频画面十字线中心位置,并锁定雷达伺服方位电机;其次确定移动站GPS天线的位置远离雷达天线方向上移动站GPS天线的位置,基线长度根据线缆长度确认,调整雷达天线俯仰角度,使其在监视器的CCD望远镜视频画面十字线中心位置,并锁定雷达伺服俯仰电机,保证了雷达光轴和GPS双天线的基线在同一条直线上,记录当前天线方位的码盘角度值A。寻北定向设备布局如图4所示。
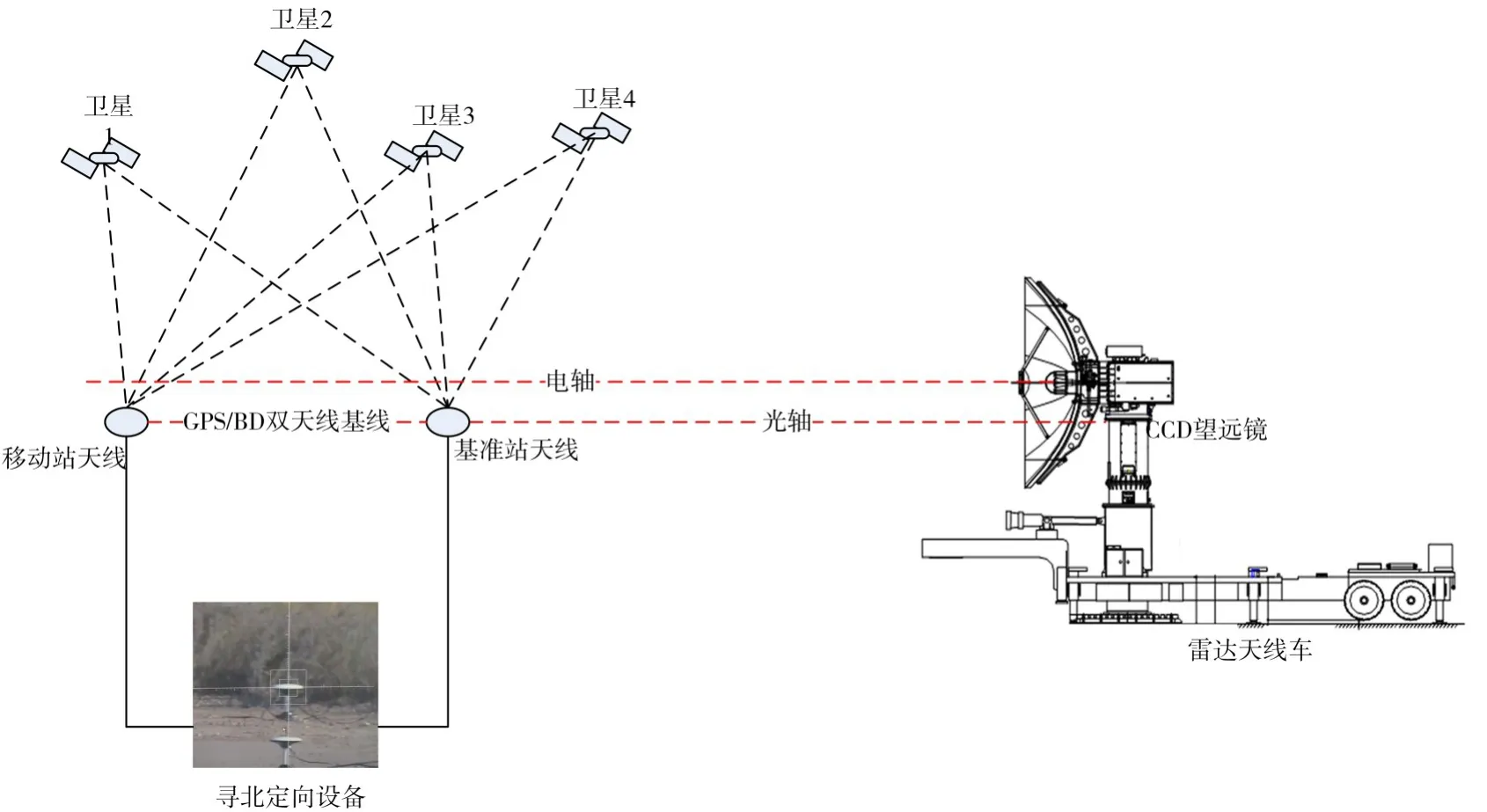
图4 寻北定向设备布置图
3)GPS/BD基线偏北角测量、显示
GPS/BD双天线定向设备加电开机,基准站、移动站自动完成搜索空域卫星,定位定向主机根据搜星的信息,解算出空间位置定位信息和载波相位关系,从而解算出双天线基线的指向角度,即偏北角,送给显示处理模块,在显示屏显示出定位信息(经度、纬度和高程)和偏北角θ。
4)方位零值解算、修正
CCD望远镜、基准站天线和移动站天线三点在一条直线上,GPS/BD双天线基线偏北指向就是雷达光轴指向,如图5所示,雷达电轴与光轴为平行关系,GPS/BD双天线基线偏北指向为雷达方位偏北指向,所以方位零值修正公式为A0=A+θ,在雷达系统应用软件零值修正分项中输入方位零值修正值为A0。
5 基于RTK技术GPS/BD双天线定向的验证
利用我部某阵地的现有条件,采用GPS/BD双天线定向的方法进行方位零值修正,然后通过方位标法与已知的6个方位标进行标校比对,验证基于RTK技术GPS/BD双天线定向的精度,方位标数据为精确的大地测量成果。
1)GPS/BD双天线定向角测量
为确保数据的准确性,减小随机误差,GPS/BD定向天线采用50m基线长度,获得20组定向角数据见表2。
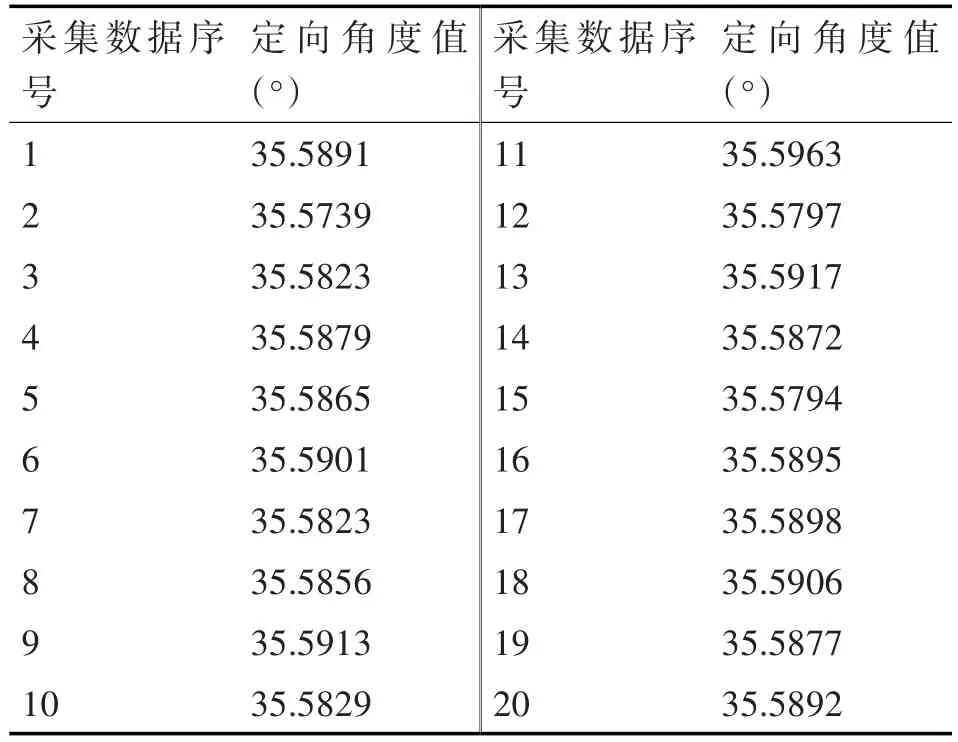
表2 定向角实测数据
表2中采集定向角数据求平均值为A0=35.5865°,雷达方位零值修正后的结果为当前方位码盘值与寻北定向角A0相加,通过雷达标校分系统软件中完成方位零值修正,即完成寻北定向。
2)寻北定向精度验证
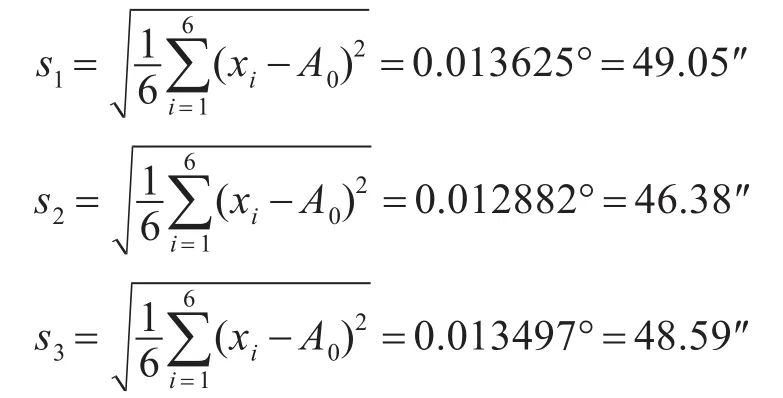
为验证寻北定向准确定,采用方位标法分别与测控站点已知6个方位标进行方位零值标校,共完成3轮标校,记录18组数据,见表3。
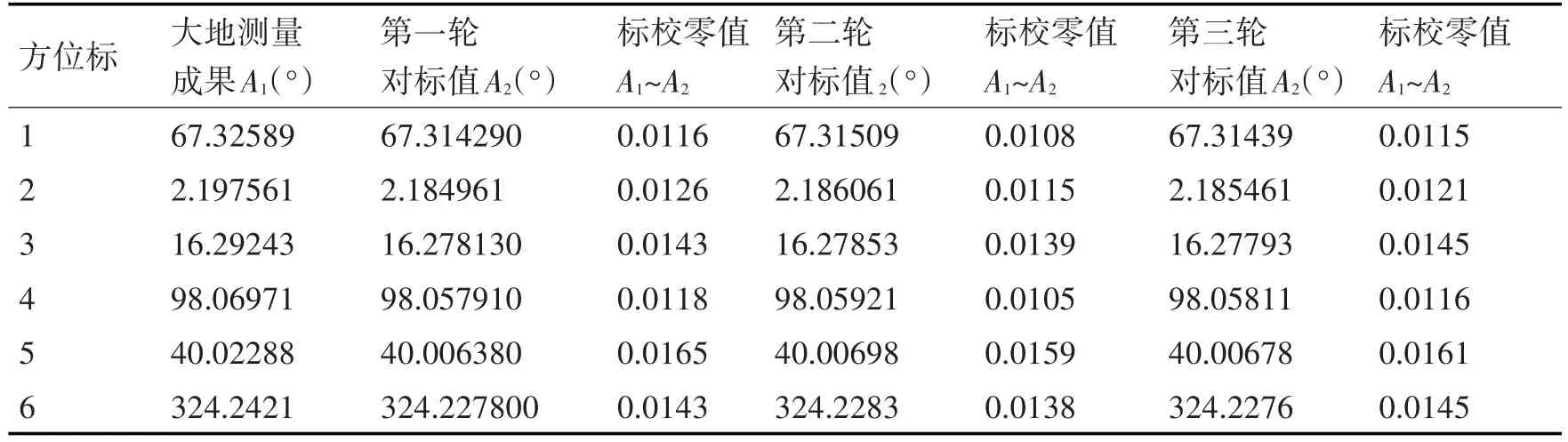
表3 方位标对标测量数据
运用基于RTK技术GPS/BD双天线定向方法进行方位零值修正后,经比对方位标标校结果可知,该方法完全满足单脉冲跟踪测量雷达应急状态下的测量跟踪要求。
6 结语
本文采用基于RTK技术GPS/BD双天线定向方法,获得天线测量系真北值的零值,通过这一有效途径,便可实现对机动式单脉冲跟踪测量雷达进行快速寻北定向,满足应急标校要求,该方法已在我部某型单脉冲雷达产品的中已经得到实际应用,出色完成多型跟踪测量任务。这种方法操作简单,自动测量和解算数据准确,基线降低对操作手的专业技术要求,提高参试效率。随着跨区域、全天候、快机动测量任务发展,测控阵地的临时部署随机性大,阵地地理环境偏僻复杂,在不利于架设方位标的情况下,该方法更能发挥作用,而且不仅可用于同型单脉冲跟踪测量雷达装备中,也可以在靶场其他测控装备上推广应用。
