GPS-RTK/UWB 紧组合精密动态定位性能分析
2021-05-24王生亮刘根友高铭曹士龙肖恭伟赵文浩
王生亮,刘根友,高铭,曹士龙,肖恭伟,赵文浩
(1.中国科学院精密测量科学与技术创新研究院 大地测量与地球动力学国家重点实验室,武汉 430077;2.中国科学院大学 地球与行星科学学院,北京 100049)
0 引言
GPS 的建成和投入使用极大地改变了传统的测绘方式,其中实时动态(RTK)定位技术可以获取厘米级定位精度,广泛应用于定位导航、工程测量等领域中[1-2].RTK 技术需要一台基准站和一台流动站接收机同时观测可见卫星,然后基准站通过通信链路发送伪距、载波相位改正信息给流动站,流动站通过差分处理后获得相对于基准站的高精度的位置坐标[3].目前RTK 技术已相当成熟,但是在一些特殊复杂环境下,如城市峡谷、树下遮挡、露天矿底部,流动站观测值存在多路径误差或由于可视卫星空间几何构型差、数量不足等原因造成无法获取高精度的固定解,只能得到低精度的浮点解甚至无法定位,严重影响了工程测量的需求[4].目前针对如何增强RTK 技术已有大量的研究,如星基增强、伪卫星增强、移动通信增强、多源传感器增强[5-8]等.
超宽带(UWB)技术是于2002 年左右才开始大力发展起来的一种短距离通信、定位系统,其采用独特的脉冲信号,具有信号抗干扰能力强、通信容量高、抗多径能力强、时间分辨率高等优点,因此在短距离室内定位领域具有非常明显的优势[9-11].目前UWB 系统采用的信号体制主要有到达时间(TOA)、到达时间差(TDOA)、信号飞行时间(TOF)、双向测距(TWR)等[12].将UWB 与GPS 组合来增强定位能力其优势在于UWB 系统成本低、复杂度低、抗多路径效应强、测距精度高,且UWB 主要在地面附近布设不受高处遮挡物影响[13-15].因此将UWB 与RTK技术进行组合定位可以有效弥补复杂环境下RTK 无法获取高精度定位结果的缺陷,且紧组合可以充分利用观测值比GPS-RTK 更有优势.但UWB 系统也有自身的不足,例如有限的测距范围,需要按需自行布设等[16-18].
本文首先介绍了UWB 定位系统的原理和基本观测方程,然后给出了GPS-RTK/UWB 紧组合的数学模型,并给出了详细的数据处理流程.在滑轨推车动态定位实验中,通过设置不同的截止高度角和人为遮挡干扰方式模拟城市峡谷或露天矿井底部等复杂环境,对GPS-RTK/UWB 紧组合的性能进行详细分析.
1 GPS-RTK/UWB 紧组合数学模型
1.1 UWB 定位原理
UWB 是近年来兴起的一项新技术,其不需要传统通信体制中的载波,而是通过发送和接收纳秒及以下的极窄脉冲来传输数据,频率范围在3.1~10.6GHz,具有传输速率高、穿透能力强、定位精度高等优点,目前在室内外定位领域已得到了广泛的应用.
UWB 定位系统包括基站(BS)、标签节点(Tag)及定位服务器,该系统通过BS 对Tag 节点测量高精度的TOA、TDOA、TOF 后进行定位.基于TDOA定位原理的UWB 系统仅需与BS 之间保持高精度时间同步即可,降低了Tag 与BS 之间时间同步的要求.三维定位时测量Tag 到4 个及以上BS 之间的TDOA测量值,多个TDOA 观测值之间建立的双曲面即可交会出Tag 的位置,基于TDOA 二维平面定位原理如图1 所示:UWB 三维定位时,设主基站BS1 坐标为(X1,Y1,Z1),第i个基站BSi的已知坐标为(Xi,Yi,Zi),其中i=(2,……,p),Tag 的待估位置为(x,y,z),令Tag 到BSi之间的距离为Ri,Ri,1为Tag 到主BS 和从BS之间的TDOA,建立方程

图1 TDOA 二维平面定位原理
对于采用TDOA 测量值进行定位的UWB 系统,由于∆Ri=Ri−R1中均存在R1,因此各∆Ri之间是相互关联的,此时TDOA 测量值的协方差矩阵可表示为
式中,一般情况下σR可取为0.1m,或根据UWB 实际测距精度评估结果确定即可.
1.2 GPS-RTK/UWB 紧组合数学模型
GPS-RTK 一般是先进行基准站与流动站站间单差,再进行卫星间求双差,设基准站为m,移动站为r,对卫星p、q 的双差观测方程为

将UWB 标签在近似位置(x0,y0,z0)处采用泰勒级数展开后并化简可得误差方程
式中:QLL表示观测向量L的协方差矩阵;Factor表示观测值类型的权分配因子(载波相位赋为1;伪距赋为100);a、b通常同时取0.003m,el为卫星高度角.
综合以上GPS 和UWB 随机模型,GPS-RTK/UWB 紧组合观测量的随机模型如下:

根据式(3)和式(4)合并后组成间接平差误差方程如下:

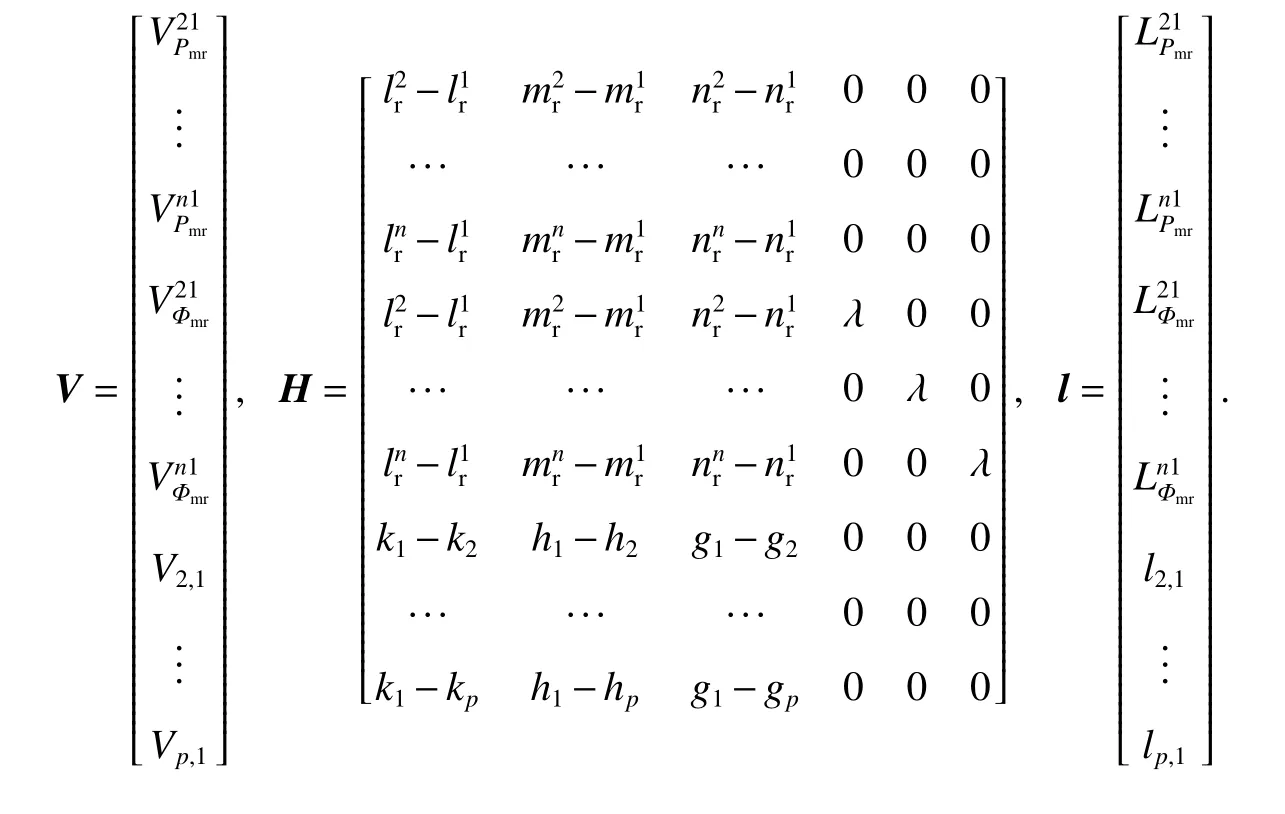
本文采用最小二乘平差原理进行参数估计

式中: P为GPS-RTK/UWB 紧组合权阵,即式(6)中协方差矩阵QRTK/UWB的逆矩阵.从式(8)中将模糊度浮点解及其协方差阵从最小二乘得到的参数估计值及其方差-协方差阵中提取出来,作为最小二乘降相关(LAMBDA)算法的输入参数,并根据Ratio 检验判断模糊度固定是否成功,设置其最小限值为3.如果固定成功,将固定解代入到参数估计方程中得到基线固定解,否则,直接输出浮点解.
1.3 数据处理流程
本文进行的GPS-RTK/UWB 紧组合实验数据处理流程如图2 所示.具体步骤如下:
步骤1:读取UWB 基站位置坐标和TDOA 观测量并预处理;
步骤2:读取GPS 基准站、移动站观测数据及广播星历数据,并与UWB 观测数据同步匹配;
步骤3:使用广播星历计算卫星位置、SPP 解算流动站近似坐标和基线近似长度;
步骤4:根据可视卫星的高度角选择参考卫星,形成GPS 双差观测值;
步骤5:组成GPS-RTK/UWB 紧组合误差矩阵、根据随机模型组成观测值权阵;
步骤6:采用最小二乘法求解待估参数及其方差-协方差,迭代多次;
步骤7:将得到的浮点模糊度和相应的协方差矩阵作为LAMBDA 算法的输入参数,如果Ratio>3,则模糊度固定成功并代入到误差方程获取其他参数的固定解;否则,输出浮点解;
步骤8:判断如果没有到达最后历元,则重复上述过程,进入下一历元直到所有观测数据解算完毕.
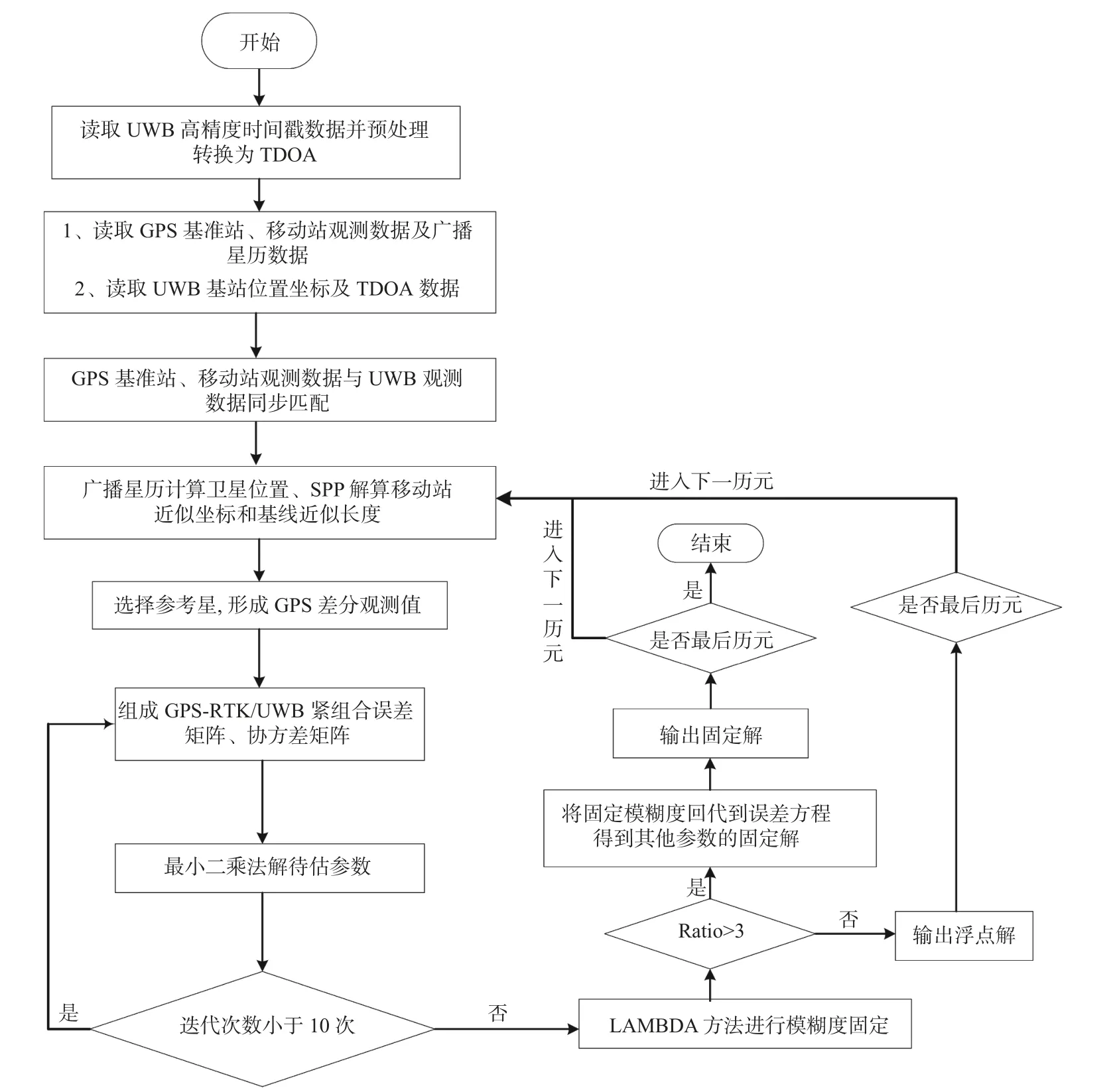
图2 GPS-RTK/UWB 紧组合数据处理流程图
2 GPS-RTK/UWB 紧组合性能分析
2.1 实验数据
实验采用两台Trimble R9 接收机分别作为基准站和移动站.基准站位安置于中国科学院精密测量科学与技术创新研究院(东湖园区)导航楼楼顶固定观测墩,移动站安置于办公楼楼顶天台,进行滑轨推车实验.UWB 采用国内寻踪科技公司的TracLocation 系统,共布设4 个UWB 基站,其位置通过RTK方式事先精确测定.GPS 天线和Tag放置在同一垂线上,且其天线相位中心差距提前测定并在数据预处理过程中进行补偿,如此可保证GPS 天线相位中心与Tag 定位中心的统一.如图3 所示,解算模式分别为GPS-RTK和GPS-RTK/UWB 紧组合两种模式,通过人为短时遮挡方式和设置不同的截止高度角模拟城市峡谷或露天矿井底部等局部复杂环境下的动态定位,分别设置截止高度角为10°、20°、40°,以高精度后处理相对定位结果作为参考真值进行统计分析.观测时间总长约为16min,有效观测历元总数为944 个,第1—778个历元为无遮挡时段,从第779 个历元开始人为遮挡干扰流动站GPS 天线.
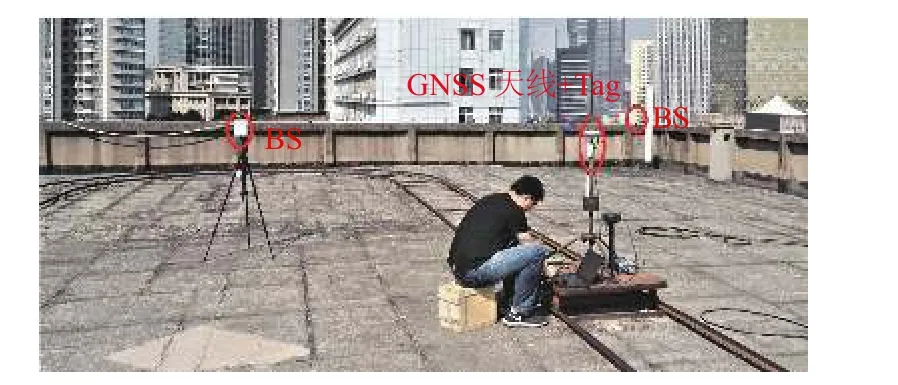
图3 楼顶滑轨推车动态实验部分现场
2.2 实验结果分析
图4、图5 分别给出了不同截止高度角情况下的可用观测值数量和位置精度因子(PDOP),可以看出,随着截止高度角增加,GPS 可用观测卫星数量逐渐减少,其中当截止高度角为40°时,GPS-RTK 共视卫星仅为3 颗,无法进行解算,参与统计的有效观测历元527 个;而GPS-RTK/UWB紧组合模式比GPS-RTK模式有效增加了可用观测值的数量,并有效地降低了PDOP 值.
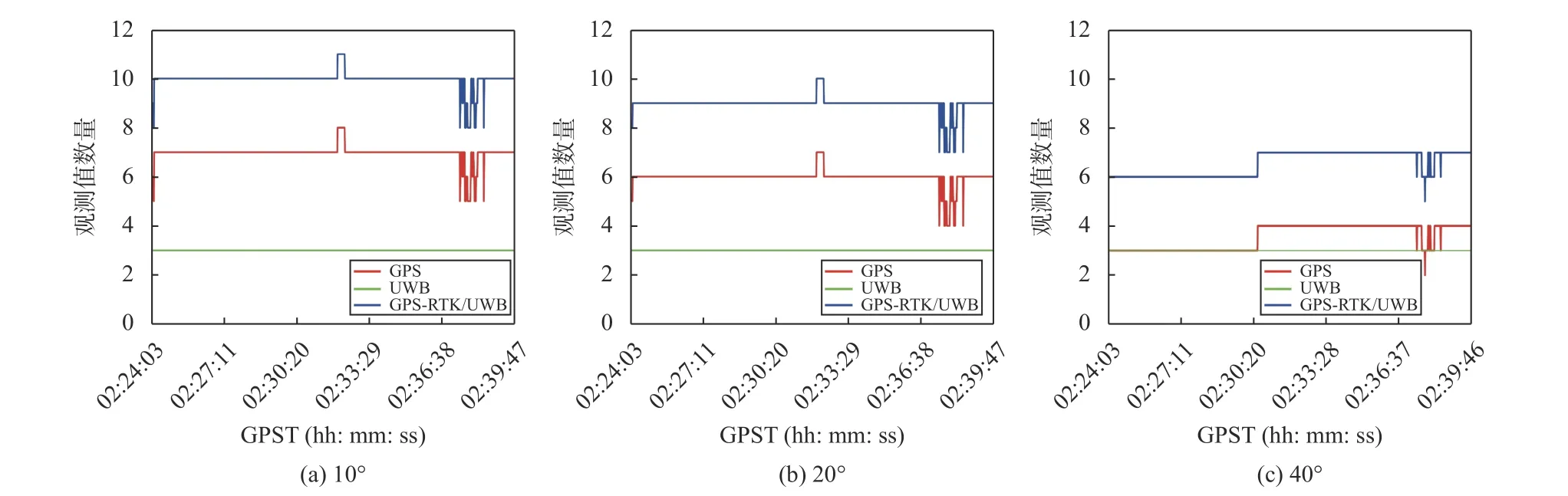
图4 不同截止高度角情况下的可用观测值
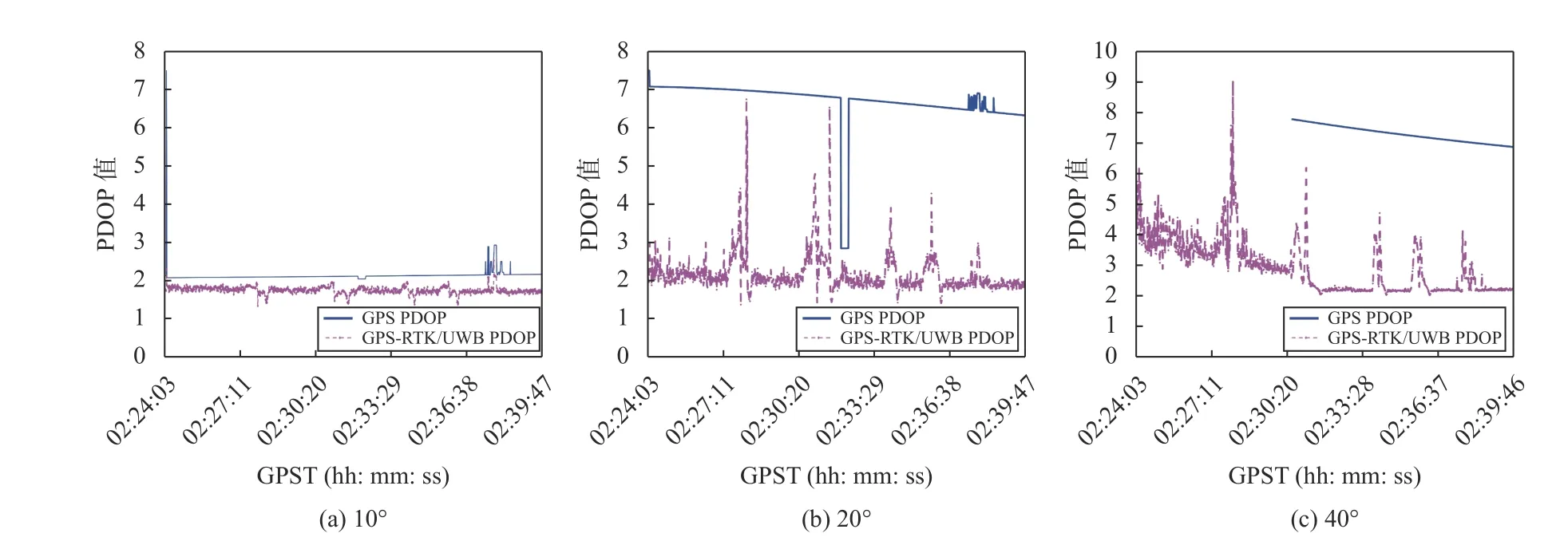
图5 不同截止高度角情况下的PDOP 值
表1 给出了GPS-RTK 和GPS-RTK/UWB 紧组合模式在不同截止高度角情况下的整周模糊度固定率统计情况,图6 和图7 分别给出了GPS-RTK 和GPS-RTK/UWB 紧组合模式在不同截止高度角情况下的小推车动态轨迹.可以看出在低截止高度角(10°和20°)情况下,GPS-RTK 在推车起始、终止位置存在较多的浮点,这是由于该位置人员走动及人为故意遮挡干扰天线来模拟复杂环境导致的GPS 观测质量下降,整周模糊度无法固定,浮点解精度较差,GPS-RTK/UWB 组合后比GPS-RTK 整周模糊度固定率均有不同程度的提高,平面轨迹更加平滑,起始、终止位置的浮点明显减少.在截止高度角为40°情况下,GPS-RTK 模式大部分历元为浮点解,整周模糊度固定率仅20.93%;GPS-RTK/UWB 组合后整周模糊度固定率达到93.96%,显著提升了固定率,浮点解精度也得到了明显改善.
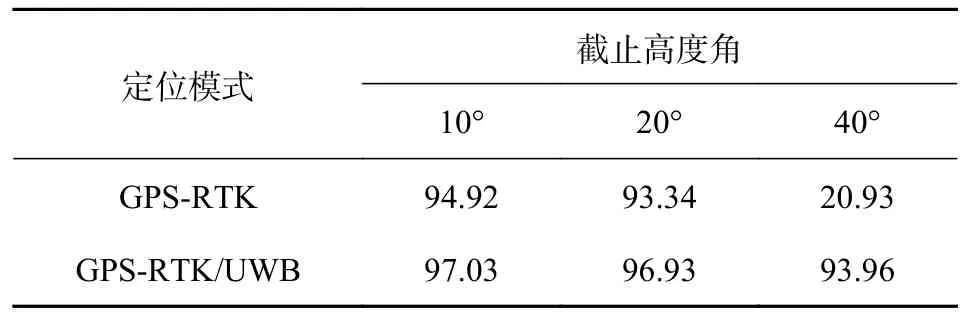
表1 不同截止高度角时的模糊度固定率 %

图6 GPS-RTK 在不同截止高度角情况下的小推车动态轨迹
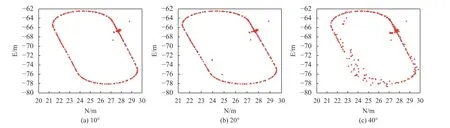
图7 GPS-RTK/UWB 紧组合在不同截止高度角情况下的小推车动态轨迹
以高精度商业软件IE 事后处理的结果(截止高度角10°,正反向平滑滤波)为真值参考,表2、表3、表4 分两个时间段分别给出了截止高度角为10°、20°、40°的结果统计情况.表2 中,截止高度角为10°时,GPS-RTK 无遮挡时段动态定位平面精度优于3cm,高程精度优于5cm,GPS-RTK/UWB 紧组合在N、E、U 方向上均方根(RMS)值分别减小47.8%、36.4%、34.8%;人为遮挡时段 GPS-RTK/UWB紧组合平面RMS 为厘米级,高程RMS 为分米级,且比GPS-RTK 模式N、E、U 方向上RMS 值分别减小了74.8%、85.7%、21.3%.
联合表3、4 可以看出,随着截止高度角增大,可观测卫星变少,PDOP 增大,GPS-RTK 动态定位精度降低,GPS-RTK/UWB 紧组合比GPS-RTK 模式在N、E、U 方向上RMS 值均有大幅的降低,即UWB 在特殊复杂环境下能对GPS-RTK起到很好的增强作用.在截止高度角为40°的环境下,GPS 有效观测历元明显减少,固定解比例仅20.93%,N、E、U 方向精度均为分米至亚米级;GPS-RTK/UWB 紧组合后极大地改善了观测状态,固定解比例显著提升到93.96%,平面RMS 值降低至厘米级,高程RMS 值降低至分米级.
综合来看,GPS-RTK 在良好的观测环境下三维动态定位精度优于5cm,复杂环境下RTK 精度显著降低,但GPS-RTK/UWB 紧组合后固定解比例明显提升,N、E 方向精度保持在厘米级,但U 方向上的RMS 值提升比例低于N、E 方向,这是由于UWB基站与GPS 接收机基本布设在同一平面内,存在不同UWB 基站在高程方向上布设很难拉开较大距离的局限性,因此其对平面的贡献要明显优于对高程方向的贡献,实际应用中应尽量依据场景将UWB 基站布设为高低错落、左右均匀分布更有利于定位精度的提升.
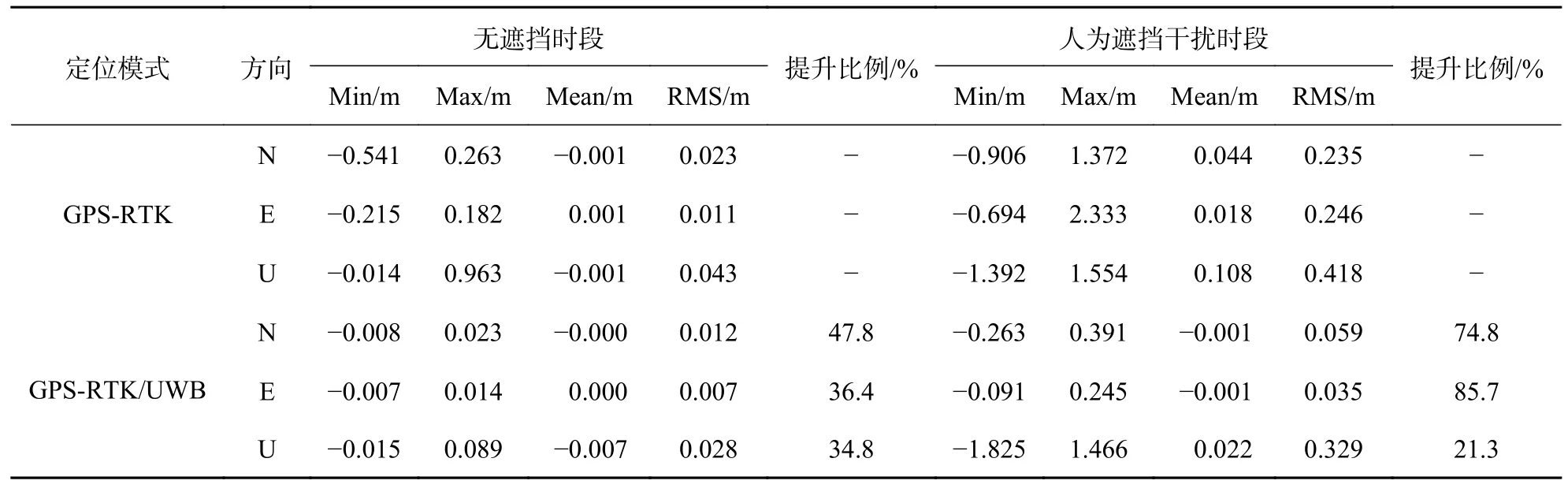
表2 截止高度角10°时小推车位置误差统计

表3 截止高度角20°时小推车位置误差统计
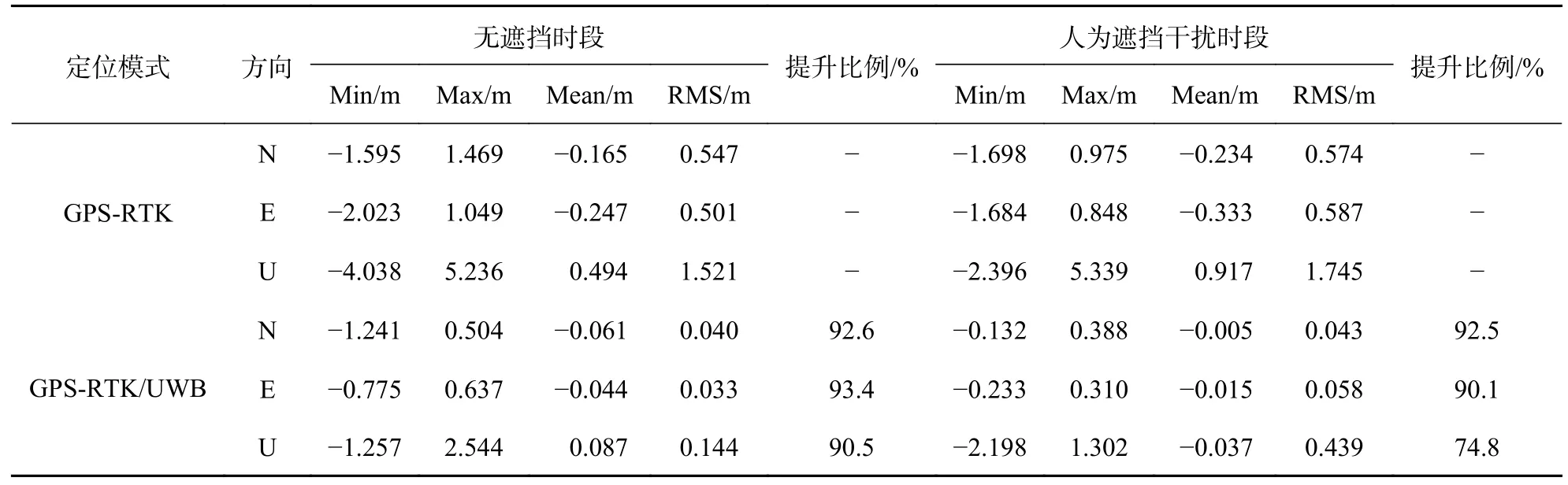
表4 截止高度角40°时小推车位置误差统计
3 结束语
针对复杂环境下GPS-RTK 定位精度低甚至由于可观测卫星数量不足无法定位的情况,开展了GPS-RTK/UWB 紧组合动态精密定位性能分析,在不同的截止高度角和人为干扰情况下分析了滑轨小推车动态定位结果,得到以下结论:
1)GPS-RTK/UWB 紧组合比GPS-RTK 模式可以有效增加观测值数量,降低PDOP 值改善可用观测值的几何结构;
2)在截止高度角较低(10°和20°)且无遮挡的良好观测环境下,GPS-RTK 的精度较高,GPS-RTK/UWB紧组合能进一步提高固定解比例和定位精度;对人为遮挡干扰情况下的定位精度有明显大幅提升;
3)在截止高度角为40°的复杂环境下,GPS-RTK有效观测历元减少,固定解比例仅20.93%,N、E、U 方向精度均为厘米至分米至亚米级;GPS-RTK/UWB紧组合后改善了观测值几何结构,固定解比例显著提升至93.96%,平面精度保持在厘米级,高程精度为分米级,仍能满足一定的工程需求.
本文研究由于UWB 基站布设在高程方向上差距不大,对GPS-RTK/UWB 紧组合后在U 方向的精度提升比例低于N、E 方向.后续研究包括不同UWB基站布设情况下与GPS 组合的效果分析及其进一步与BDS、GLONASS、GALILEO 等多系统进行组合.