成庄矿无轨胶轮车调度系统研究
2021-05-21赵越仁
赵越仁
(晋能控股煤业集团成庄矿,山西 晋城 048000)
0 引 言
无轨胶轮车具有车型多样、灵活高效、运输成本低以及运量高等优点,在煤矿井下辅助运输中应用逐渐普遍[1-2]。成庄矿近些年来通过技术改造,井下辅助运输中无轨胶轮车已逐渐替代调度绞车、齿轨卡轨车、无极绳绞车等运输方式。但受井下巷道断面面积以及无轨胶轮车体积限制,尤其是遇到支架搬运车、铲车等大型车辆运输时,绝大多数巷道宽度无法满足无轨胶轮车错车要求,因此,必须采用分区段单向单车运行控制方式。胶轮车辅助运输系统运行主要通过人工调度实现,从而使得无轨胶轮车运行效率低,车辆运行安全保障能力较差。特别是巷道内有两辆对向行驶的无轨胶轮车时,驾驶人员通过对讲机相互联络,不仅存在通信效率低下而且生产、工作效率均不能满足矿井高效生产需要。
为了提高成庄矿无轨胶轮车运输效率及运行安全保证能力,提出采用先进的网络通信以及电子信息技术设计一种无轨胶轮车调度系统,实现对井下所有无轨胶轮车运行的安全、高效调度,从而在一定程度上提升成庄矿辅助运输系统工作效率。
1 无轨胶轮车调度系统总体结构
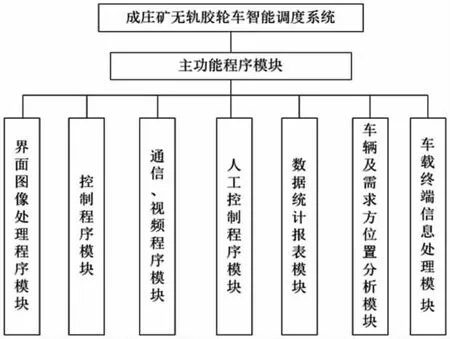
图1 调度系统总体结构
无轨胶轮车调度系统应在满足国家相关规范、标准基础上,适应煤矿井下长时间连续工作以及运行环境恶劣等需要。无轨胶轮车运行由地面指挥中心统一调度,操控界面直观、便于调度。调度系统综合无线网络通信、车辆定位、调度智慧、车载视频监控等技术,可实现车辆防追尾、运行状态实时监控、车辆调度管理、数据查询以及司机管理等功能,实现无轨胶轮车有序工作[3-4]。
调度系统的关键组成包括有井下无轨胶轮车定位系统、无线网络系统、胶轮车车载终端系统以及安全管控系统等。调度系统各功能模块构成见图1 所示。
2 关键子系统分析
2.1 无线通信网络
在成庄矿地面办公区均布置有无线通信网络,因此在井下主要辅助运输巷构建无线网络系即可满足无轨胶轮车监控需要。无线网络系统包括有eSCN230 核心网、地面基站、KTZ319-Z 光电转换器、UPS 电源、交换机、融合通信调度系统等构成。由于地面无线网络已实现全覆盖,文中重点对井下无线网络构建进行阐述。
井下无线通信系统主要由本安型基站、UPS 电源等构成。井下巷道布置基站时基站天线向巷道左右2 个方向覆盖,巷道条件不同,基站的有效覆盖范围也存在明显差异。在坡度小、平直巷道内基站有效覆盖半径可达到1 000 m,在有较大坡度的巷道基站有效覆盖半径降低至750 m,当巷道内存在多个转弯点时基站有效覆盖范围为500 m。
根据井下无轨胶轮车行走路线,在4105 巷、4102 巷、四五联络一巷、5102 巷等巷道内布置足够数量的无线基站。井下无线基站通过光纤与地面KTZ319-Z 光电转换器连接。根据现场需要将无线网络组网方式为链型组网。
2.2 无轨胶轮车、人员定位
无轨胶轮车高效调度的基础工作之一就是精准掌握各无轨胶轮车位置。以往煤矿井下定位一般采用区域定位技术,该定位技术精度较低,难以满足无轨胶轮车高效调度需要。近些年来随着科学技术发展,煤矿矿车等机电设备定位技术也不断发展,特别是基于UWB 的定位技术应用,为无轨胶轮车定位精准定位提供了可靠选择,该定位技术定位精度可达到30 cm,可满足井下无轨胶轮车调度需要[5]。具体基于UWB 的定位技术原理见图2。
成庄矿无轨胶轮车、人员定位采用基于UWB 的定位技术。井下定位系统包括有车载定位装置、定位基站、人员定位装置以及位置计算模块。车载定位装置用以定位无轨胶轮车实时位置、人员定位装置用以确定需求方位置,定位装置中的定位卡采用UWB协议将位置信息传输给定位基站并通过无线网络将位置信息传输给地面监控中心。在地面监控中心显示器上可事实显示无轨绞车位置、人员位置[6-7]。通过精准掌握无轨胶轮车、工作人员位置,并通过无线通信网络即可搭建无轨胶轮车供给方以及需求方间信息传输通道,在确保安全的前提下提高无轨胶轮车运行能效。
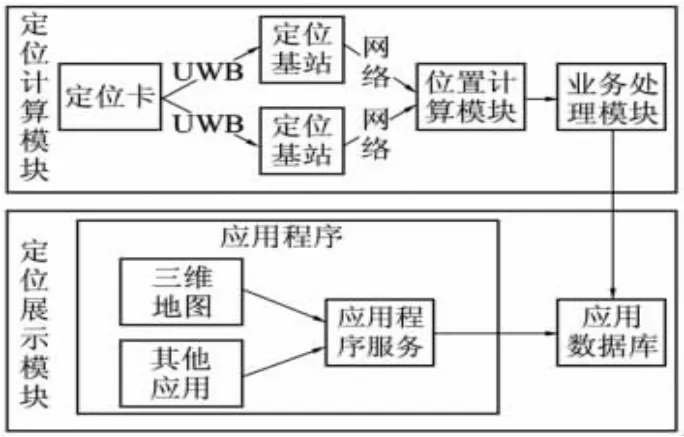
图2 基于UWB 的定位技术原理图
2.3 无轨胶轮车运行安全管控
为了提高无轨胶轮车运行保障能力,调度系统集成了井下定点测速、交通信号重要路口(巷道交汇位置)语音报警、区段测速以及视频监控等数据,通过调度系统内嵌的软件分析处理后,根据井下需要可控制重要路口红绿灯状态,从而控制无轨胶轮车停止、避让以及行进等操作,确保无轨胶轮车可顺畅运行。通过融合监测到的实时数据,可在一定程度上规范驾驶员行为,不仅解决无轨胶轮车运行拥堵问题,而且提升了辅助运行系统安全管控水平。
2.4 车载终端接入
车载终端通过无线网络与地面调度中心联通,从而建立了无轨胶轮车司机与调度中心间的信息交互通道,具体无轨胶轮车车载终端各操作界面见图3。车载终端人机交互界面可实时显示无轨胶轮车状态参数,并显示调度中心发出的调度指令。无轨胶轮车司机根据自身情况对是否接受指令进行判定,当接受指令调度中心根据需求方位置向车载终端发出导航信息。

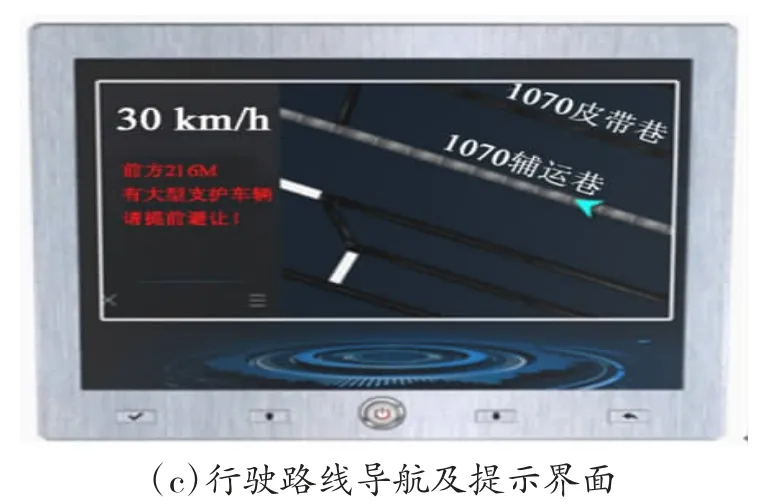
图3 车载终端操作界面
同时车载终端接入车载视频信号(包括倒车影像、车厢影像),驾驶员可通过车载视频掌握无轨胶轮车内外环境情况,同时视频信号通过无线网络传输至地面监控中心进行存储,存储时间为7 d。
3 调度系统软件构成
3.1 软件架构
调度系统软件由客户端、服务端两部分构成。服务端通过井下无线网络将信车辆位置信息、需求方位置信息以及车辆行驶状态等传输到地面监控中心,调度系统按照预先控制逻辑以及车辆行驶规则发出红绿灯控制指令,从而实现无轨胶轮车的有序通行。
3.2 调度软件功能
1)巷道监控显示。在表示层通过不同颜色表示不同巷道位,并显示出无轨胶轮车在巷道内的滞留、行驶时间,行驶速度。实时显示巷道内无线基站、定位装置等设备的运行情况。当发现通信网络出现故障时会技术发出预警信息,并通过报表记录故障时间、类型等参数。
2)车辆运行指挥。调度系统采用基于UWB 的定位技术对无轨胶轮车进行定位、跟踪,并实时显示车辆位置及运行状况。车辆运行指挥通过控制各巷道内红绿灯实现,通过合理控制红绿灯指挥无轨胶轮车有序驶入特定巷道或者在错车区等待,从而确保人员、车辆可平稳通行。调度系统控制主机根据现场监测结果发出控制指令实现车辆合理调度。若井下遇到紧急情况时可手动控制信号等颜色,或者发出警报信息,提醒井下人员及时撤离。
3)车辆智能调度。根据井下各无轨胶轮车位置、工作状态以及需求方位置,调度软件会自动生产调度指令,具体调度算法根据已经研究成果确定,生成调度指令后需要调度员再次确定后向无轨胶轮车发出调度指令。司机接收指令后按照调度系统生产的运行路线行驶至需求方位置,从而实现车辆的智能调度。
4 结 论
结合成庄矿无轨胶轮车调度情况,提出综合无线传输、精准定位等技术的无轨胶轮车调度系统,并对该系统的结构组成、主要功能等进行阐述。提出的智能调度系统以辅助运输巷无线通信为基础,通过集成车辆位置、需求方位置、运行情况等情况,调度系统会自动发出调度指令。驾驶员接收调度指令后,依据调度系统给出的运行路线行驶,从而实现井下无轨胶轮车的高效调度及安全运行。
