一种基于EMD 分组式的DMD 自适应幅值预测方法*
2021-05-20唐宝煜
朱 军,唐宝煜,李 凯
(1.安徽大学,安徽 合肥 230601;2.上海科技大学,上海 201210)
0 引言
在MIMO 系统中,高速场景非常值得研究,因为用户依然希望在高速移动的车辆上获得高数据速率[1]。当用户处于移动状态时,基站与用户之间的信道状态信息(Channel State Information,CSI)会在短时间内急剧波动。只有准确预测出移动用户未来时间点的CSI,才能为MIMO 系统的高性能和高质量服务提供有力的支撑。现在已经发展出了两种经典的基于模型的预测方案,分别是自回归(Auto-Regressive,AR)模型[2]和参数模型[3]。基于AR 模型的预测方案容易受到附加噪声等缺陷的影响[4]。在面对实际的移动场景时,AR 模型预测方案不具有吸引力。参数模型应用的前提条件是相对于信道衰落的速率,信道参数变化非常缓慢[5],不符合移动场景的设定。
DMD 是一种数据驱动的时空算法,可以用来分析非线性动态系统随时间的行为模式,从而预测系统的未来状态[6]。文献[7]将DMD 用于振荡等离子体的行为预测。文献[8]将DMD 融入智能建筑中来预测供暖、通风和空调系统的温度。本文提出使用DMD 算法预测移动用户信道幅值,并提出了优化算法——AEG-DMD 算法。该算法将子信道响应所分的组数作为阈值来分辨DMD 算法和基于EMD分组式的DMD 算法(EG-DMD)的使用场景,从而可以预测不同移速用户的信道幅值。
1 用户数据模型
上海科技大学的雾计算实验室为本文提供了移动用户的信道矩阵数据。移动用户的信道模型使用的是3GPP38.901 中的统计模型——城市宏蜂窝(3D-UMa)模型。天线设置、大尺度及小尺度衰落均以3D-UMa 模型为准。由该模型得到的移动用户信道数据为复数形式。该模型具体各项参数如表1 所示。

表1 移动用户信道模型参数
2 DMD 预测移动用户信道幅值
DMD 算法使用特征值和模态来表示动态系统的演化过程。假设对动态系统进行均匀采样,得到有限长度的快照序列为:

式中,xi(i=0,1,…,M)代表观测向量x在第i个时间点的状态,M+1 为快照时间点个数,X0M代表从序列的初始0 时刻到第M个时刻的集合。设观测向量x的维度为N。
假设有一个线性映射A可以将系统的状态xi连接到随后的状态xi+1,即:

式中,映射A在整个采样区间内是近似相同的。如果该快照序列是非线性过程,那么该映射相当于线性切线近似。现将快照序列X0M-1写成Krylov序列:

将式(2)和式(3)相结合可得到:

为了避免矩阵的数值病态,Schmid 提出利用快照数据矩阵的奇异值分解(Singular Value Decomposition,SVD)来计算动态系统的模态[9]。其主要思想是通过酉变换和截断最小奇异值来抑制病态性。现对X0M-1进行SVD:

式中,U描述了快照序列的空间结构,V代表了快照序列的时间结构,,σ1≥…≥σmin(N,M)≥0,σi为X0M-1的第i个奇异值。
将X0M-1近似为一个低秩矩阵,即对于k∈{1,…,min(N,M)},定 义Vk=V(;1:k),所以有。此时可以表示为:



可通过所获得的DMD 模式及对应的特征值来预测该系统第M+1 个状态:

式中,Zk+为Zk的伪逆。
本文所使用的移动用户信道矩阵为复数,表示为H。用Hk表示第k个移动用户的信道矩阵:
式中,基站端天线有p根,移动用户端天线有q根,hkl(1 ≤k≤p,1 ≤l≤q)代表基站端第k个天线到移动用户端第l个天线的信道响应。由于H是用复数来表示的,因此可令hkl=akl+bkli,所以每一个hkl的幅值可以表示为:

进行预测仿真时,先使用表1 的参数来生成移动用户信道复数矩阵数据,然后使用式(11)将复数矩阵转换为幅值形式,再使用DMD 方法进行预测。在预测时,采用前5 个传输时间间隔(Transmission Time Interval,TTI)数据预测后1 个TTI 数据的形式,即用第1~5 的TTI 数据预测第6 个TTI 数据,再用2~6 个TTI 原始数据来预测第7 个TTI 数据,以此类推。图1 展示了使用DMD算法预测不同移速某用户信道幅值的预测效果。
如图1 所示,对于用户速度较低的低复杂度信号而言,利用DMD 算法预测MIMO 系统矩阵幅值效果较好。图1(a)的幅值预测曲线基本和真实幅值曲线相吻合,只有少量的点出现了毛刺现象。然而对于用户移速较高的高复杂度信号,DMD 算法无法再准确地抓住系统的变化模态。图1(c)的预测幅值出现了剧烈抖动和发散情况,此时DMD 算法已无法再用于高移速的用户信道幅值预测。
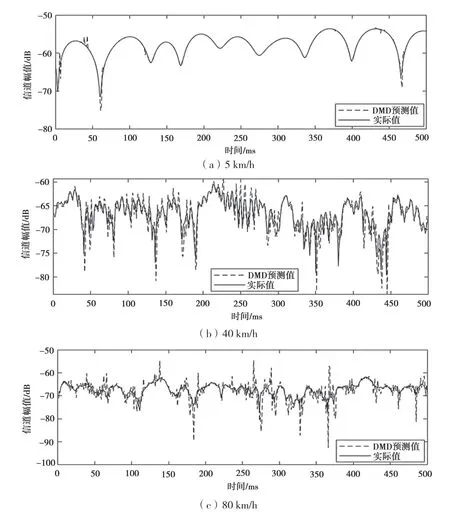
图1 DMD 算法预测不同移速某用户的信道幅值
3 AEG-DMD 预测移动用户信道幅值
3.1 EG-DMD 算法
EMD 算法不需要信号的频率、幅度等先验知识即可对信号进行分解处理。因此,EMD 在分析非平稳非线性信号方面具有独有的优势[10]。其主要思想是自适应地将输入信号分解为有限的单一频率零均值基本分量,这些基本分量称为固有模态函数(Intrinsic Mode Function,IMF)。每个IMF 应满足下面两个条件:
(1)极值点的数目和过零点的数目要么相等,要么相差为1;
(2)包络线平均值在任何点上都为零(分别用极大值和极小值组成上包络线和下包络线)。
设原始信号为x(t),其EMD 分解步骤如下:
步骤1:找出x(t)的所有极值;
步骤2:用3 次样条插值将极大值组成上包络,极小值组成下包络;
步骤3:求出上下包络的均值;
步骤4:用原数据减去均值,此时假设余量为临时IMF 分量;
步骤5:检查临时IMF 分量是否符合IMF 的两个条件,若不满足,则将临时IMF 重复前面步骤,直到条件满足为止;
步骤6:用原数据减去第一个IMF 分量,得到残余数据;
步骤7:令残余数据为原数据,重复以上步骤,直到IMF 无法提出为止。
x(t)在经过EMD 分解后,可表示成若干IMFs和残差信号之和:

式中,n为IMFs 的个数,d(t)为残差信号。
本文提出的EG-DMD 算法的主要思想是:对于所获取的移动用户信道复数矩阵,先进行幅值转换,对每个子信道响应时序图进行EMD 分解,所有子信道响应经过分解后进行分组,分组过后,对每一组信号进行DMD 算法,预测后续TTI 的信道幅值。每一组都预测完毕之后,将每组的预测值相加,再加上相应的平均位移,合并为最终的预测幅值。
分组原则为:
(1)所有子信道响应分解的IMF1 分量作为第1 组,所有IMF2 分量作为第2 组,以此类推。
(2)每个子信道响应分解出的IMF 分量个数如果不相等,则以最少IMF 个数的子信道响应为准,舍弃其他子信道响应多余的IMF 分量及残差信号。
进行仿真时,依旧是采用前5 个TTI 数据预测后1 个TTI 数据的形式。图2 展示了使用EG-DMD算法预测不同移速某用户信道幅值的预测效果。
在用户移速较高时,相较于DMD 来说,EGDMD 具有较好的预测能力。图2(c)的幅值预测曲线和真实幅值曲线相差不大,毛刺现象比图1(c)预测曲线的毛刺现象少得多。然而,当用户移速较低时,如图2(a)所示,虽然EG-DMD 能够很好地把握用户的信道幅值变化情况,但会出现预测偏高或偏低的情况,并没有DMD 预测得准确。
3.2 基于组数的阈值区分
从3.1 节可以知道,DMD 算法和EG-DMD 算法分别适用于低移速低复杂幅值信号和高移速高复杂幅值信号的预测。但需要注意的是,不能简单地从用户移速大小来判断使用DMD 和EG-DMD 的阈值,因为无论是用DMD 还是用EG-DMD 进行预测,MRE 并不是随着移速的增加而单调递增。为了分辨出使用DMD 和EG-DMD 的阈值,对所有移动用户的信道数据分别进行DMD 和EG-DMD 预测。图3 展示了信道数据所分出的组数与MRE 的关系曲线。
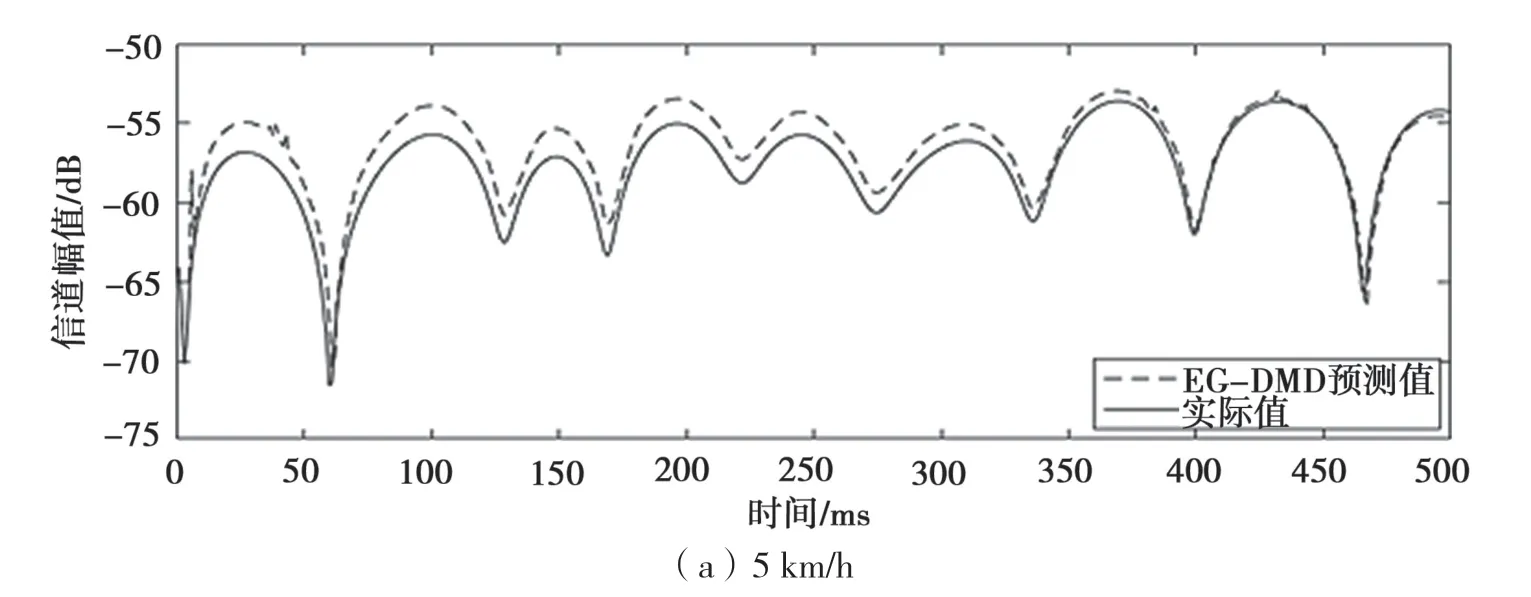

图2 EG-DMD 算法预测不同移速某用户的信道幅值
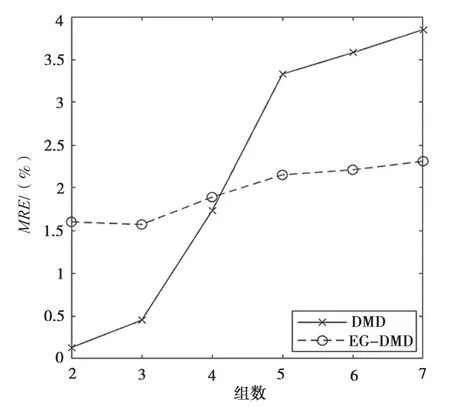
图3 对不同组数信号进行预测的MRE
从图3 中可以发现,当信道幅值矩阵所分出的组数大于或等于5 时,使用EG-DMD 的MRE 更小,组数小于或等于4 时,直接使用DMD 预测的MRE会更小。因此,AEG-DMD 算法可以写为:

图4 展示了分别使用DMD、EG-DMD 和AEGDMD 预测移动用户信道幅值的MRE。

图4 使用DMD、EG-DMD 和AEG-DMD 预测的MRE
根据图4 可以看到,AEG-DMD 综合了DMD和EG-DMD 的优势,即对于低移速移动用户信道幅值使用DMD 进行预测,使得预测结果平滑又准确;对于高移速移动用户信道幅值使用EGDMD 进行预测,使得预测结果的毛刺较少且MRE较低。因此,基于组数的阈值区分可以自适应地区分预测环境,自动判断何时使用DMD,何时使用EG-DMD。
3.3 不同预测算法的比较
将文献[2]中的AR 预测、文献[3]中使用的多项式拟合预测和AEG-DMD 预测进行MRE 比较。所有预测形式均采用前5 个幅值数据预测后1 个幅值数据形式,因此AR 预测时的阶数取5,而多项式拟合取4 次多项式。图5 展示了以上方法预测移动用户信道幅值的MRE 曲线。

图5 多种预测方法的MRE
图5 中AR(5)表示只使用5 个幅值数据计算AR 系数,而AR(100)使用100 个幅值数据计算AR 系数。从图5 中可以看出,AR(5)预测的MRE 最大,并不适用于幅值预测,AR(100)预测移动用户信道幅值的MRE 整体较小,甚至在预测20 km/h 的移动用户幅值时比AEG-DMD 更好,但其他移速的预测方面不如AEG-DMD。多项式拟合预测方式非常适合预测低移速用户的信道幅值,其MRE 与AEG-DMD 的MRE 非常接近,但是在面对高移速用户时,其预测误差有陡升现象,这和文献[3]描述的一样,即只有变化缓慢的信道预测才使用该方法。因此,AEG-DMD 整体的预测情况最好。
4 结语
本文提出AEG-DMD 算法来预测移动用户信道幅值,将子信道响应所分的组数作为阈值来分辨DMD 算法和EG-DMD 算法的使用场景。仿真结果表明,AEG-DMD 算法既可以使用DMD 算法预测低移速用户信道幅值,又可以使用EG-DMD 算法预测高移速用户信道幅值。