On transitioning from PID to ADRC in thermal power plants
2021-05-19ZhenlongWuZhiqiangGaoDonghaiLiYangQuanChenYanhongLiu
Zhenlong Wu · Zhiqiang Gao · Donghai Li · YangQuan Chen · Yanhong Liu
Abstract
Keywords Active disturbance rejection control (ADRC) · Proportional-integral-derivative (PID) · Thermal processes ·Coal-fired power plant · Field applications✉ Donghai Li lidongh@mail.tsinghua.edu.cn
1 Introduction
Thermal processes, such as coal-fired power plants, gasifier boilers, gas turbines and nuclear power plants, are the main sources of electricity generation, providing more than 80%of the total power supply in China and playing dominant and irreplaceable roles for electricity consumers in the long time to come. With the development of material technology and applications of the distributed control system (DCS) with full digitalization, informatization and integration, thermal processes have experienced a rapid increasing of the unit scale and pressure parameters [1]. However, the problem of control in such processes prove to be challenging because of strong nonlinearity, imprecise mathematical models, strong coupling, distributed parameter characteristics and wide operating conditions. In addition, the booming growth of the renewable energy with the intermittency and randomness in the electricity market means that the thermal processes have to accelerate their response to command. In addition, the increasing requirements of economy and safety make the control design more challenging for thermal processes and open the door for more classical or advanced control strategies in improving the operation levels and control performance.
Among them, the proportional-integral-derivative/proportional-integral (PID/PI) controller has a dominant and irreplaceable role with its reliable performance and simple structure [2, 3]. However, the complexity of the control problem hidden behind the structural simplicity is translated into the difficulty of parameter tuning in field applications, where it often takes long time even for engineers with many years of experiences on a particular setup. The trial and error nature in tuning and the lack of guarantee in performance under changing working conditions have been nagging problems associated with this dominant, and seemingly irreplaceable, control technology. Generations of researchers have tried and failed to replace PID as a general-purpose solution for thermal processes, with model-based modern control strategies such as model predictive control [4], adaptive control [5], dynamic feedback linearization control [6] and disturbance observer based control [7]. Dependence on precise mathematical models, computation complexity and implementation diffi-culty may have been the limiting factors in general and should be avoided in future developments asprerequisite.
In addition, control strategies of thermal processes should be (1) reliable; (2) simple to understand and to configure in DCS; (3) intuitive to tune with an explicit set of tuning rules;(4) robust in terms of stability and performance; and (5) powerful in handling of nonlinearities.
Scanning the landscape of control engineering, the new breed of technology developed under active disturbance rejection control (ADRC) seem to satisfy the prerequisite and meet the demands of thermal processes as described above. Originally proposed by Prof. Han some 20 years ago [8], ADRC has experienced a rapid development both as a field of academic research and as a new breed of control technologies popular with practitioners.
Inheriting the basic error-feedback structure of PID and the state-space formulation and observer design in modern control theory [9], ADRC is built on the conceptualization of the “total disturbance”, i.e., accumulative effect of both the external disturbance and internal uncertainties upon the controlled output,adding the second layer of feedback to estimate and cancel such disturbance via extended state observer (ESO) in realtime [10]. Once the “total disturbance” is removed, controller only needs to deal with a plant that’s more or less ideal, thus removing the main challenges in controller tuning and robustness. The validity of such design principle has been the subject of academic study, see for example [11-15], and of practical applications, see for example [16-21]. In addition, a few surveys have been conducted on theoretical analysis, synthesis scheme and industrial applications of ADRC [22-33]. The objective of this paper is to provide an overview on the studies and applications of ADRC pertaining to thermal processes.
The rest of this paper is organized as follows: the paradigm shift from PID to ADRC with backward compatibility is discussed in Sect. 2. Section 3 presents some fundamental research issues on ADRC’s applications in thermal processes such as the implementation techniques, parameter tuning,and modified design structures. Section 4 discusses and presents ADRC’s applications in thermal processes in detail,where applications in coal-fired power plants, gas turbines and nuclear power plants are presented. Among them, the field application results are highlighted. The last section is devoted to conclusions and discussions on further research opportunities.
2 The paradigm shift: from PID to ADRC with backward compatibility
PID as a dominant general-purpose solution has dominated industry practices in the last 250 years [34]. Its origin, in the form of proportional control, can be traced back to centrifugal governors at the beginning of industrial revolution [35]. The integral and the derivative terms were later added as incremental improvements and the full PID controller was given by Elmer Sperry for ship steering in 1911,and its mathematical form was given by Nicholas Minorsky in 1922 [36].
From the very beginning, the Watt’s Principle, a.k.a. proportional control, is not without competing design principles. However, one by one, said Prof. Trinks, they fell [37].The so-called classical control theory, from 1940s, and the modern control theory from 1960s on, did not do little to change the industry practice on the ground and PID continues to stand alone to this day as the only viable general purpose solution.
What makes ADRC different?
2.1 Penetrating insight and backward compatibility
It is no coincident that the landmark book on ADRC started with a deeply insightful explanation of the machinery of PID and its characteristics [9]. The control action is driven by the output deviation from the set point, taking into the calculation its current, past, and future; on average, the stability can be maintained by a wide range of gains but not the good performance. Simplicity in PID comes with a heavy cost of parameter sensitivity: i.e., good performance can only be obtained with a very narrow range of the gains and they are difficult to find (tune).
The problem of PID tuningis especially sever in the thermal power industry where each generator has over a hundred PID loops and very few, if any, faculty personnel seems to have the expertise to tune them. Most “advanced control”solutions failed because (1) they are not compatible with the PID design principle and/or (2) they cannot be tuned by an on-site engineer.
ADRC inherits the PID’s deviation-driven design principle but expand the notion of deviation from output to system dynamics, to be explained below; its implementation can be reduced, with some trade-off, to the standard form of PID for convenience and backward compatibility [38-41]; and it can be coded and tuned in DCS easily on site by graduate students with no industrial experiences, and by on-site engineers.
2.2 From one-dimensional to two-dimensional design
Parallel to the black box, deviation-driven PID design of engineering practice, academic researchers as a whole leveraged the concept of feedback, based on which a modelbased control theory has been developed, from “classical control” to “modern control” theory. Instead of driving the deviation to zero, the goal of feedback control theory is to use feedback to modify the system behavior, i.e., stability,transient and steady state characteristics, etc. However different, these two paradigms share the single-mindedness in design objective, be it deviation reduction or the change of dynamic characteristics. Both are “one-dimensional”.
In comparison, the ADRC design is by nature twodimensional as shown in Fig. 1 [42], in a fashion familiar to many practicing engineers: cascade control. The inner loop,i.e., Rejector, design is based on ESO with the objective of reducing the system dynamics to that of chained integrators, or Han canonical form [42]. In other words, the Rejector removes the total disturbance and forces the system to behave like the ideal one. Most importantly, this is done with very little model information assumed.
The controller design follows that of PD to reduce the output deviation to zero, except it can be scaled tonth-order systems with proportional and multiple derivatives terms.The integral term in the controller is removed because it is not needed for the plant of chained integrator form.
Note that the two-dimensional design is not the same as two-degree-of-freedom (2DOF) design, which can be found in the classical compensation network. For example, a 2DOF control structure can be solely designed to comprehensively modified the system dynamics and is, therefore, one dimensional in the sense discussed above.
2.3 Parameter tuning
Engineering is all about making trade-off; all controllers need to be tuned in practice, to obtain the performance that is good enough and to address other constraints, such as stability margin and noise sensitivity. There is no absolute,single-minded, “optimality” in practice. Parameter tuning of ADRC is no different. It starts with the question of“how fast ESO needs to be in order to promptly estimate and remove the total disturbance within the bandwidth of the control loop?” The answer of which will determine the bandwidth of ESO and, by extension, all ESO gains.
Fig. 1 The two-dimensional structure of ADRC [42]
The controller gains, on the other hand, are selected based on its bandwidth requirement, which in turn is determined by the design specifications. Note that both ESO and controller bandwidth are hard currency in control engineering: the higher the bandwidth, the higher the cost.Therefore, the general guideline is to select the lowest bandwidth possibly but still meet the design specifications.
In contrast, the dilemma in PID tuning is (1) before we start, we do not know if a set of PID gains exists that will lead to good performance in both disturbance rejection(and by extension, robustness) and command tracking; (2)even if such parameter set exists we do not know how to systematically find it; and finally (3) assuming such a parameter set is found, any changes made to it either by experience or by accident would likely to change the performance significantly, as shown by Prof. Han [9].
The transitioning from PID to ADRC will fundamentally resolve the current dilemma.
3 ADRC applied to thermal processes
This section concerns with concrete steps in the transition from PID to ADRC on ADRC, in the context of engineering practice with thermal processes as the background.From a users’ perspective, issues such as the DCS implementation of the ADRC algorithms, the insight and procedure of parameter tuning, and the need for structural modification.
3.1 Factory implementation
When ADRC is applied to thermal processes, the following considerations of implementation seem unavoidable:
1. How to implement ADRC in DCS?
2. How to determine the relationship between ADRC and original control strategies?
3. How to set the initial values of ESO?
The DSC platform commonly associated with thermal processes comes with its own set of programming and computing modules, on which ADRC is to be implemented. For example, the schematic diagram of ADRC for the first-order plant is illustrated in Fig. 2, where algebraic operations and integrators are commonly available on any DCS platform(the integrator is obtained from the existing PID module).Thus, the following linear ADRC algorithm

can be implemented in DCS as in Fig. 2 andβ1,β2, andb0are parameters to be tuned. Note that this is a very simple solution in contrast to advanced control solutions, whether they are model-based (robust, adaptive, optimal, etc.) or model-free (sliding mode, data-driven, neural network, etc.).
As ADRC is applied to thermal processes in industry,it cannot replace the original control strategies (PI/PID)directly for safety considerations. Instead, ADRC and the original control strategies (PI/PID) are often implemented in parallel and the control is switched from the existing solution, often PID, to ADRC bumplessly, and vice versa.As shown in Fig. 3, the manual control by operator has a highest authority in giving command to actuators. ADRC and PI/PID are always on and run in parallel, the transition between the two is operated by on-off signal and the details on the switching logic can be found in [43]. When ADRC is applied to cascaded control system or the coordinated control system (multivariable system), ADRC and the existing solution are also implemented in parallel with the switching logic, such as the outer or the inner controller of cascaded control system, or the individual controller of multivariable system. The implementation of ADRC is the same as discussed above. Note that some protection logics for cascaded control system may be different from that of the single-loop system, such as lock up increase and decrease.
3.2 Setting the initial values of ESO
If the initial values of ESO are not set correctly, it may take a long time before its output is useful. This is the root problem called “peaking” during the transient period.The abrupt change of control signal can result in severe wear and tear, even irreversible damages for actuators.The details on how to calculate initial values of ESO are discussed in [43-45] and the objective, for the first-order thermal process, is
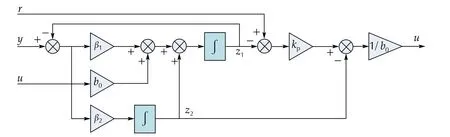
Fig. 2 The implementation schematic diagram for a linear first-order ADRC

Fig. 3 The switching logic of ADRC and PI/PID

whereufddenotes as the feedforward control signal. This allows the ESO always track its target even when ADRC is not used to drive the actuators. In other words, ESO is always on and it always keeps track, ready to be switched to any time.
3.3 The design of ADRC parameters
One of the reasons most advanced control solutions do not take roots in practice is because of the lack of transparency and simplicity in tuning. No matter how good the solution is on paper, in theory, it must allow to users to make trade-offamong competing desires. This is where ADRC shows clear advantage as discussed in Sect. 2. In this subsection, some quantitative tuning rules which are applicable to thermal processes are summarized as follows.
For a nonlinear ADRC applied to thermal processes, the separation principle can be applied to tune its parameters where parameters of ESO can be decided by Fibonacci sequence. For a linear ADRC, the bandwidth-parameterization method is the widely used in tuning [10] and is also particularly appropriate for thermal processes. Based on the bandwidth-parameterization method, several tuning rules have been developed for thermal processes. A simple tuning method for the second-order plant with high performance and good robustness is summarized in [46]. A method to determined ADRC parameters based on the existing (generalized or conventional) PID/PI controller can be found in[47], which offers a fundamental support for wide applications of ADRC in thermal processes. Zhou et al. [48, 49]also presented different methods to obtain the ADRC parameters from the existing PI/PID parameters directly, which are also suitable for thermal processes. For theK∕(Ts+1)n-type high-order processes, which are common for thermal processes, quantitative tuning rules of the second-order ADRC and first-order ADRC for high-order processes are deduced under maximum sensitivity function constant in [50, 51]. A quantitative relationship between the observer bandwidth and the controller bandwidth is provided based on the stability region analysis of ADRC and its effectiveness has been validated in secondary air system [52]. A quantitative tuning rule of a modified ADRC for first-order plus time delay(FOPTD) systems is developed, where all controller parameters are calculated by a single coefficient [53]. Recently,a design idea of ADRC based on probabilistic robustness is proposed for almost industrial processes in [54], where the probability of uncertain systems with ADRC satisfying control requirements is optimized under the control requirement constraints. This method is also suitable for thermal processes.
Together, these tuning methods make tuning ADRC simple, systematic and intuitive.
3.4 Modified structures of ADRC
What makes controlling of thermal processes challenging is that there are maybe many time delays throughout the systems. They also tend to be high-order with multipleinput multiple-output. To improve the control performance of these systems, the structure of ADRC must be modified and improved. In [55], ADRC is modified to accommodate time delay by adding a time delay block to ESO, thus making its inputs synchronous, leading to enhanced stability characteristics. Another approach is to add to ESO a predictor to offset the time delay [56]. However, the oscillation due to model mismatch may be severe. To this end, a conditional feedback and model information are introduced in [57] to reduce the oscillation effectively. With the same purpose,an enhanced ADRC with a prediction filter is proposed for open-loop stable, integrating and unstable processes by approximating them as time delay systems [58]. Likewise,the low order, modified ADRC is proposed for a class of high-order processes in the form ofK∕(Ts+1)n[22, 59].A high-order ADRC combined with a low-order ESO and certain state observers is also proposed for high-order systems, where the order of ESO is limited to three or four for anynth-order system [60, 61]. Finally, a modified reducedorder observer is developed for the decoupling of two-input two-output systems, which is appropriate for thermal processes [62].
4 Examples and case studies
This section presents the recent progresses and research results of ADRC in thermal processes in detail, where the applications in coal-fired power plants, gas turbines, nuclear power plants and other thermal processes are focused.
4.1 ADRC applications in coal-fired power plant
The coal-fired power plant is a typical multivariable system,which faces many control difficulties such as strong decoupling, strong nonlinearity, large time delay and multi-source disturbances. These control difficulties have been analyzed in detail as discussed in [63]. Coal-fired power plant is a complicated industrial thermal system with more than one hundred subsystems and loops where steam-water system and combustion system are concerned mainly in this paper.Steam-water system includes feed water system, drum water level system, superheated steam temperature system, reheat steam temperature system, regenerative heater system and deaerator system. Likewise, coal-pulverizing system, furnace pressure system, primary air system, secondary air system and furnace bed temperature system (for CFB power plant) constitute combustion system. What follows is the review of ADRC applications in several significant systems and some field application results are presented in detail.
4.1.1 Superheated steam temperature system
Superheated steam temperature is a significant indicator of safety and economy for a coal-fired power plant. If the superheated steam temperature exceeds the safe range, the steel tube has to endure the unrecoverable damage and the power plant may experience an unplanned shutdown. The thermal efficiency of the power plant would considerably reduce when the superheated steam temperature is below the safe range.
ADRC based on the cascade control structure has been designed for superheated steam temperature system since 2000 [64-66]. Some ADRC designs about parameter tuning and modified structures for superheated steam temperature system have been reported recently where the effectiveness of ADRC are validated by simulations [67-70].Coal-fired power plant simulator, as a virtual realization of the real power plant, provides a new method to verify the control performance of different controllers. A cascade ADRC-ADRC/PID control framework is constructed and its advantages of control performance and adaptive ability is illustrated on STAR-90 simulator [71]. Z. Wu et al.[72] analyzed the frequency-domain characteristics of the second-order modified ADRC proposed in [21] and illustrates advantages of the proposed ADRC based on a simulator named industry automation platform. Liang et al.[73] focuses on the set of reusable initial values for ADRC parameters and the detailed implementation of ADRC in the DCS. The real-time simulation based on a simulator verifies the effectiveness of ADRC. A single-loop with a hybrid ADRC structure is proposed to replace the cascade control structure for the superheated steam temperature system and its advantages of tracking and disturbance rejection performance are also tested on a simulator [74].
Based on the rich achievements of simulation results,ADRC has applied to the superheated steam temperature system and there are many reported field applications [21,50, 75]. Figure 4 presents some filed application results in [21], where the superheated steam temperature with ADRC can ensure a much smaller fluctuation range than that of PI controller. Note that ADRC experiences a larger range of load disturbances and the superiority of ADRC can be explained well.
4.1.2 Combustion system
The CFB boiler with low emission, wide fuel adaptability and strong load adaptability, has been widely used in many countries. The combustion process of the CFB boiler has strong nonlinearity and decoupling which can be handled well by ADRC. Nonlinear ADRC has been proposed for combustion system with different control structures [76-78].A multi-objective optimization algorithm is proposed to optimize ADRC parameters with multiple control objectives[79, 80]. Novel ADRC strategies based on effective openloop transfer function (EOTF) and multivariable internal model structure are also designed for the combustion system in [81, 82], respectively. Besides, a second-order modified ADRC and a hybrid ADRC structure with the Bode ideal cut-off (BICO) filter are proposed to enhance the tracking and disturbance rejection abilities of combustion system [59,83].
Recently, successful field applications of ADRC in secondary air system have been reported [51, 84]. Figures 5 and 6 show comparative filed results in [51] where reference step tests for ADRC and PI controller are performed within the same load range for a fair comparison. It can be learnt that ADRC has fast tracking speed with a small overshoot and the average settling time has been reduced greatly by ADRC. Recently, a robust ADRC design method based on probabilistic robustness is proposed in [84], which has been applied to secondary air system successfully. The proposed ADRC design based on probabilistic robustness is able to guarantee the excellent operation of secondary air system during the whole working conditions.

Fig. 4 The comparison results of a switch from PI controller to ADRC for superheated steam temperature system in [21]. a The power output. b The primary steam temperature set point and outputs.c The secondary steam temperature output

Fig. 5 Field application results of ADRC for secondary air system in[49]
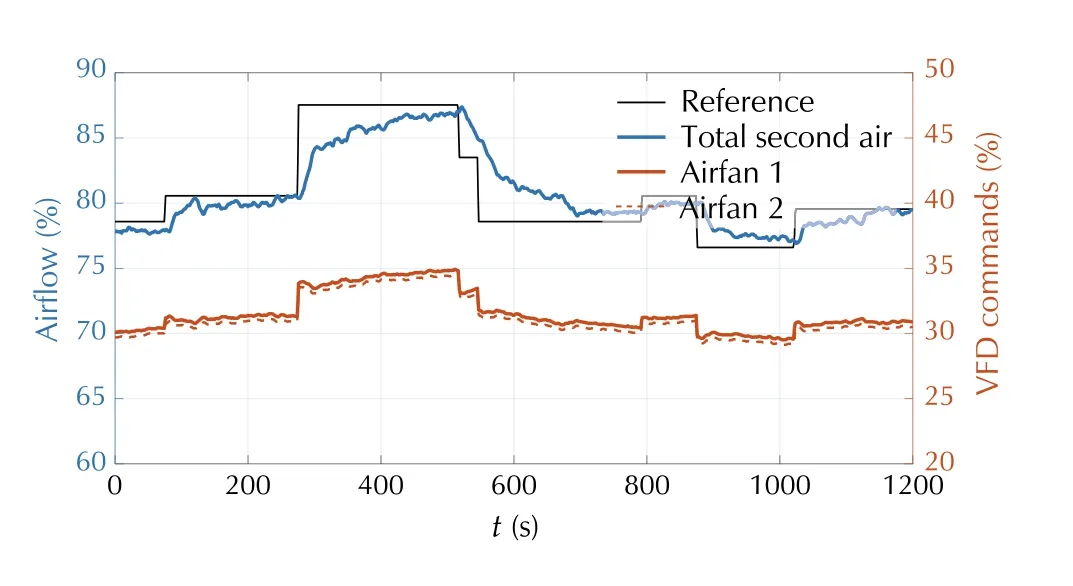
Fig. 6 Field application results of PI for secondary air system in [49]
Moreover, ADRC is also reported some field applications to control the furnace pressure system, which is disturbed frequently by the change of fans and fuel burning in furnace[85, 86]. Based on the initial parameters setting and retuning procedure, the retuned ADRC has been applied in the furnace pressure control system in GUODIAN TAIZHOU power plant, Jiangsu Province, China. Two different disturbance conditions are considered and field application results are presented in Figs. 7 and 8. It can be learn that the maximum range of oscillation with PI controller is 0.46 kPa,which is reduced by 30.4% to 0.32 kPa with a retuned ADRC from Fig. 7 when the feeding air disturbance rejection occurs. Fig. 8 shows the disturbance rejection performance under the coal mill B starting condition where ADRC can avoid the frequent fluctuation and reduce the total time recover the pressure back to its original value greatly.
4.1.3 Coordinated control system
The CCS is the most significant system for coal-fired power plants, which is a typical two-input two-output system. The output power and the main steam pressure denote as the outputs of the CCS. Likewise, the coal feed and valve opening of steam turbine denote as the inputs of the CCS. Except the control difficulties mentioned above such as the strong decoupling, strong nonlinearity, large time delay and multisource disturbances, the contradiction between fast loop(steam turbine) and slow loop (boiler) is the biggest challenge for the CCS. How to relieve these control difficulties and improve the control performance of the CCS becomes a prior task for the application of ADRC in coal-fired power plants. The ADRC design for the CCS has studied for a long time [87-93]. To extend the operation ranges of coal-fired power plants, a gain scheduling design based on ADRC is proposed under full operating conditions [63]. Based on a linear switching method and stability analysis, the proposed ADRC is able to obtain better control performance under different load tracking rates and disturbances. Huang et al. [94,95] focused on the implementation of a nonlinear ADRC on STAR-90 simulator and the experimental results illustrate the effectiveness and realizability of ADRC for the CCS.Besides, to relieve the boiler-side delay, the load feedforward signal is introduced into the liner ADRC design [96,97]. The proposed control structure is tested in a full-scope simulator with a stronger disturbance rejection ability.

Fig. 7 Feeding air disturbance rejection performance in [83]

Fig. 8 Coal mill B starting disturbance rejection performance in [83]
A modified ADRC proposed in [21] has been applied to the main steam pressure system of the CCS in TONGDA power plant, Shanxi Province, China [98]. With a quantitative tuning rule considering the influence of feedforward, the main steam pressure system with ADRC can track the set point of pressure (also named as optimal pressure) quickly with a small overshoot and has a much smaller fluctuation range than that with PID controller.Besides, the total number of overpressure is significantly reduced for the main steam pressure system with ADRC which can reduce the working pressure of filed operators. Since the main steam pressure can track the optimal pressure well, the main steam pressure system with ADRC can reduce the coal consumption and improve the economic efficiency of power plants. Due to the satisfactory control performance, ADRC has been working for more than 2 years and 10 mouths since November, 2017. Note that the field application of ADRC is still in operation.Figures 9 and 10 are the running data in 2017 and 2018 where the time span is ten hours, respectively. More running data and the comparative analyses between ADRC and PID controller can be seen in [98].
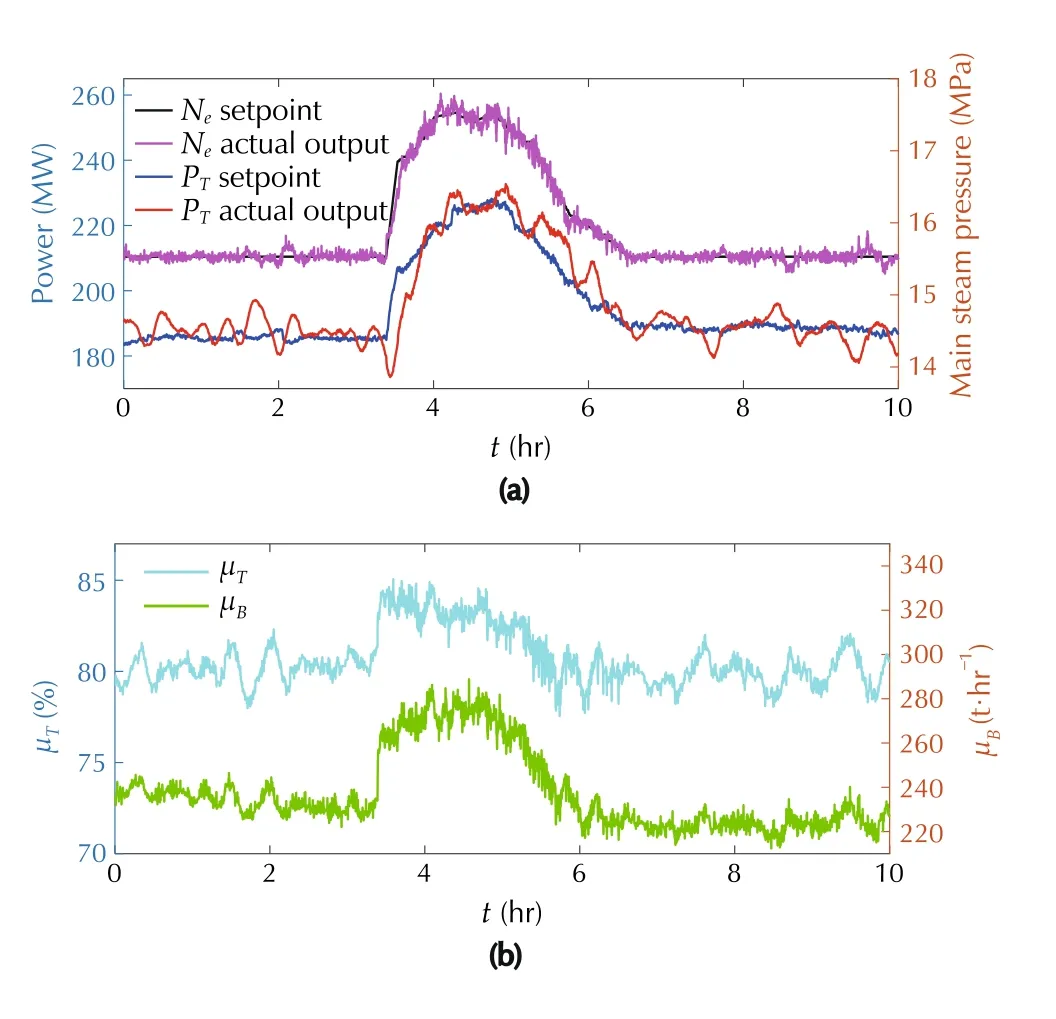
Fig. 9 Field application results of ADRC for coordinated control system. a The power and main steam pressure outputs. b The valves open of steam turbine and coal feeder. The time span of the field application is from 03:57 to 13:57 in November 28, 2017

Fig. 10 Field application results of ADRC for coordinated control system. a The power and main steam pressure outputs. b The valves open of steam turbine and coal feeder. The time span of the field application is from 02:00 to 12:00 in July 30, 2018
4.1.4 Coal‑pulverizing system
Coal-pulverizing system can pulverize the raw coal transported by coal conveyor belt into the pulverized coal and mix them with the primary air. It is a multiple-input multiple-output system with strong coupling and large time delay.ADRC has been proposed to relieve its control challenges in the last twenty years. A nonlinear ADRC with static decoupling has been designed for the ball mill coal-pulverizing(BMCP) system in [99], where a nonlinear ADRC with static decoupling has been compared with reserved-frame normalization method and Smith predictive compensation method in different control loops. Ma et al. [100] presented the nonlinear ADRC design with dynamic decoupling for the BMCP system. Due to the implementation difficulty of the nonlinear ADRC, a decentralized linear ADRC is designed for the BMCP system [101], where ADRC shows good tracking performance with a small overshoot, strong disturbance rejection ability and strong robustness. The outlet temperature of the coal mill, as a significant parameter for the safety of the coal-pulverizing system, is also concerned.L. Sun [102] reported a successful field application of the modified ADRC in [55] for the outlet temperature control,where the ADRC tuned by the proposed quantitative tuning rule can obtain better disturbance rejection performance than the field PI controller and the maximum temperature deviation of ADRC is much smaller than that of the field PI controller.
4.1.5 Drum water level system and other systems
Drum is a pivotal device for a subcritical power plant where steam is heated, evaporated and superheated. High drum water level would cause irreversible damages to steam turbine blades. The water circulation in furnace can be interrupted if the drum water level is too low and this can lead to the furnace tube cracking. Therefore, how to guarantee the drum water level in a reasonable range is of critical importance. ADRC is also designed to improve the control performance of the drum water level system. C. Xu et al. [103, 104] propose a cascade control structure where the outer-loop controller and the inner-loop controller are ADRC and PI/PID controller, respectively. To overcome the phenomenon of “false water level” caused by the disturbance of steam flow signal, ADRC with the steam flow denoting as the feed-forward of the inner-loop is proposed for drum water level system [105]. Besides, an ADRC with anti-actuator saturation, a high-order ADRC, an improved ADRC and the sliding mode control based on ESO are designed for drum water level systems in [106-109], respectively.
Regenerative heater is used to heat the working fluid (tube side) by the high-temperature steam (shell side) extracted from the turbine. The operation level has an obvious influence on the heat exchange efficiency and the safety of the regenerating heater system. ADRC has been reported to apply in regenerative heater system [45, 110]. Figures 11 and 12 present the field application results of PI controller and ADRC, respectively. It can be learnt that ADRC obtains a stable tracking curve with a small overshoot and weak oscillation while the PI controller produces a much more sluggish regulatory. Moreover, the maximum deviation of the PI control is 24 mm, while that of ADRC is only 10 mm.ADRC has obvious advantages in both tracking and disturbance rejection performance.
As mentioned above, the successful field applications of ADRC in thermal power plants can be summarized as follows: ADRC has been applied to superheated steam temperature system [21, 50, 75], secondary air system [51, 84],furnace pressure system [85, 86], coordinated control system[98], coal-pulverizing system [102], drum water level system [45, 110]. Note that these systems belong to different power plants such as TONGDA power plant, GUODIAN TAIZHOU power plant, HAIFENG power plant and HENGYUN power plant.
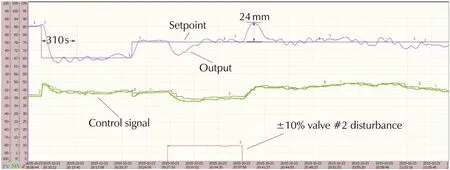
Fig. 11 Field application results of PI controller for regenerative heater system in [45]. The time span is 60 min

Fig. 12 Field application results of ADRC for regenerative heater system in [45]. The time span is 33 min
4.2 ADRC applications in gas turbine
Gas turbines and heavy-duty gas turbines, as an important supplement for electricity supply, have been widely used to deep peak-regulating operation. Besides, the control of micro gas turbine, which plays an indispensable role in distributed power generation system, is also becoming more and more important. Totally, gas turbines system has to work in a large-scale load-varying condition to meet the electricity demand of consumers. However, gas turbine systems also face many control challenges such as strong decoupling,nonlinearity and fuel fluctuations.
To speed up the load response and improve the control performance of the closed-loop system for gas turbines systems, ADRC has been designed for gas turbines systems. J.Jiang et al. [111, 112] presented an application of ADRC in turbine engine Titan 130 where the proposed approach is superior to the classical PID controller in maintaining the stability. Shi et al. [113, 114] focused on the operation of the heavy-duty gas turbine where ADRC was designed and the ability of ADRC to handle with system uncertainties is tested by Monte Carlo trials. Unstable combustion, characterized by essential nonlinearity, and shifting operating conditions, is a practical problem in gas turbines. ADRC,as an effective tool of active suppression of combustion oscillation, has been proposed to suppress the unstable combustion [115]. The experiments illustrate that ADRC can effectively suppress the pressure fluctuation caused by the unstable combustion. More experimental data can be seen in [115]. The main operating models of the full operation envelope, containing the start-up mode, loading mode and unloading mode, is built for micro gas turbine in [116].A nonlinear ADRC is designed and hardware-in-the-loop tests show that the proposed control strategy not only realize the speed tracking from the idle speed to the nominal speed but also achieve the load tracking at the nominal speed well.
4.3 ADRC applications in nuclear power plant
Nuclear power plants do not produce air pollutants such as sulfur dioxide, nitrogen oxides and soot, and the emission of carbon dioxide is far lower than that of coal-fired power plants. Nuclear power plant is playing an increasingly critical role in global power supply and its control strategy is becoming more and more important for nuclear power plant’s safety.
Gu et al. [117, 118] focused on the water level control of steam generation. The multi model-based ADRC is designed for each model under different operating conditions to handle with the strong nonlinearity caused by wide working conditions. Pressurizer is a highly complex, nonlinear, and time-varying system, and Y. Xue et al. [119] introduced ADRC to the water level control of pressurizer which suffers large overshoots and low stability. The feasibility and effectiveness of ADRC is illustrated by the significant improvement of control performance. Moreover, a novel compound control scheme that combines partial feedback linearization and the linear ADRC is proposed for the pressurized water reactor power [120]. The accelerator driven subcritical reactor system is recognized as an effective facility for the transmutation of minor actinides in high level radioactive waste. Y. Liu et al. [121-123] designed ADRC for the reactor power and the core coolant outlet temperature. ADRC optimized by the genetic algorithm at the beginning of the life still obtains the good control effect at the middle and the end of the life cycle as discussed in [121]. F. Liu et al. [123]proposed ADRC with the model information of the secondorder nonlinear models for the reactor power and the core coolant outlet temperature, respectively.
4.4 ADRC applications in other thermal processes
ADRC has been applied to not only these thermal processes as discussed above but only many other thermal processes.In this subsection, the applications of ADRC to some typical thermal processes are introduced in detail.
Gasifier boiler, as a component of integrated gasification combined cycle power plants, is a highly coupled multi-variable system. To compare the control performance of different controllers, the ALSTOM gasifier benchmark problem is proposed by Dixon as a black box model [124]. ADRC has been designed for the ALSTOM gasifier benchmark problem recently [125, 126]. A first-order ADRC scheme for the ALSTOM gasifier is designed and simulation results show that ADRC is superior to the PI solution.
Proton exchange membrane fuel cell (PEMFC) system has been seen as a brand-new power generation technology which can convert the chemical energy directly into electrical energy. Zhao et al. [127] presented a disturbance decoupling control based on ADRC for a centrifugal compression system, which is used to supply the compressed air to the fuel cell. The experimental results based on a 10 kW fuel cell show that ADRC performs better in both the transient and steady states. Sun et al. [128] presented a practical test of ADRC on a 300W PEMFC experimental bench which shows that ADRC has the obvious advantage over the conventional PI controller in both tracking and regulation performance. In addition, an ADRC with a switching law is proposed for the stack temperature regulation problem in PEMFC [129]. Experimental results show that ADRC can make the PEMFC temperature reach the target value with small fluctuation and short response time.
Absorption chiller is widely used in the distributed energy system and solar-assisted cooling system. The reasonable control strategy can ensure the fast response and high effi-ciency of the absorption chiller. He et al. [130] introduced ADRC design with the robustness constant for absorption chiller. Simulation results illustrate ADRC can provides better control performance when it is applied to control the chilled outlet temperature and demonstrates stronger disturbance rejection ability.
Organic rankine cycle (ORC) is an advanced power generation technology with low-grade energy. R. Shi et al. [131]proposed an ADRC approach for the ORC, which is composed of an outer sub-loop controller for the evaporating pressure. A controller allocator for mass flow rate allocation of the exhaust gas, and an inner sub-loop controller for the valve openings are designed. Simulation results show that the cycle and the overall energy efficiencies are increased significantly.
5 Conclusions and outlooks
This paper presents recent major progresses of active disturbance rejection control (ADRC) in thermal processes especially in coal-fired power plants. The profound interpretation of the paradigm shift nature of ADRC with backward compatibility is discussed in detail. Implementation techniques, tuning methods and modified design structures are also reviewed, which provide the theoretical fundamentals and application supports. The recent progresses of ADRC in thermal processes such as coal-fired power plants, gas turbines and nuclear power plants are reviewed.Some field application results in coal-fired power plants such as the applications in superheated steam temperature system, secondary air system, furnace pressure system,coordinated control system and regenerative heater system are presented in detail.
Even though great progresses of the applications in thermal processes for ADRC have been made, the following future work about the industrial applications not only in thermal processes but also in other industrial processes should be developed:
1. More theoretical studies to improve the control performance of thermal processes should be carried out.The necessary structural design of ADRC should be emphasized based on different dynamic characteristics of thermal processes. How to obtain ADRC parameters quickly is another important aspect. Auto-tuning toolbox or quantitative tuning rule will be very useful for largescale industrial applications of ADRC.
2. Even though there are many filed applications in thermal processes and ADRC in the CCS has been put into operation for a long time, more applications in different processes such as gas turbine, distributed energy system and more loops in coal-fired power plant should be promoted. Correspondingly, the commercialization of ADRC for thermal processes should be carried out to bring the advantages of ADRC into full play in industry.
3. Due to the complexity of thermal processes, the combinations between ADRC and other advanced scientific research achievements such as edge computing, artificial intelligence, big data, data-driven even fractional calculus cannot be ignored, thus “smart ADRC” even “smart control engineering” [132] can be realized. Besides,ADRC design with actuator saturation constraints [133]also is a research topic worthy of study.
AcknowledgementsThis work was supported by the Science &Technology Research Project in Henan Province of China (No.212102311052), the National Key Research and Development Program of China (No. 2016YFB0901405) and the National Natural Science Foundation of China (No. 61473265). Special thanks go to Elsevier,MDPI and American Chemical Society Publications for their permissions of the reproduction and reuse Figs. 1, 4, 7 and 8, Figs. 5 and 6,and Figs. 11 and 12, respectively. Special thanks also go to Dr. Yuqiong Zhang at China Electric Power Research Institute, Dr. Li Sun at Southeast University and Dr. Ting He at Jinan University for their support in figure data of the field application results.
杂志排行

Control Theory and Technology的其它文章
- Simplifying ADRC design with error‑based framework: case study of a DC-DC buck power converter
- A phase‑locked loop using ESO‑based loop filter for grid‑connected converter: performance analysis
- Tuning of active disturbance rejection control for differentially flat systems under an ultimate boundedness analysis: a unified integer‑fractional approach
- Data‑driven disturbance observer‑based control: an active disturbance rejection approach
- Extended state observer‑based pressure control for pneumatic actuator servo systems
- Recent advances on distributed online optimization