用电子陀螺精密云台对准立火道测温区的方法
2021-05-18孙园露韩念琛潘国强
孙园露,韩念琛,简 熙,潘国强
(1.太原理工大学化学化工学院,山西太原 030024;2.太原理工大学机械工程学院,山西太原 030024)
0 引言
近年来,研究红外比色测温仪在焦炉测温中的应用较多[1-5]。有研究焦炉数学模型的,通过其他部分的温度推算立火道温度,优点是经济,能利用现有测点的数据无需增加硬件成本,缺点是准确性较差。也有研究多点固定式测量立火道温度的,方法是在被测炉盖上打孔安装红外测温仪,用压缩空气进行冷却,优点是实时性好,缺点是测点较少,投资成本过高[6-12]。研究炉顶轨道测温机器人的不多,更少见如何将自动测温仪对准测立火道温点的方法研究。新型轨道测温机器人测温方法是其自动运动到被测立火道并精确定位,揭开炉盖,固定在安装了电子陀螺仪的精密云台上的测温仪自动对准立火道底部测温区进行测温,测温完毕,合盖,运动到下一个被测立火道重复上述过程。
1 云台的结构及测温位置
1.1 测温云台结构
图1为机器人的3D建模的图形。测温机器人高度低,行驶在角铁铺设的轨道上,专门用来测量位于装煤车控制室底部的立火道温度。
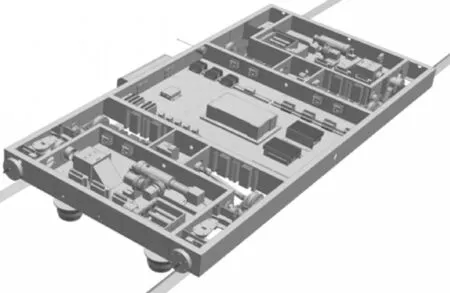
图1 测温机器人三维模型
测温机器人共分3个舱室,而测温机器人的前后2个舱室都包含了图2所示的测温云台,且2个测温云台以机器人中心为原点,呈中心对称分布,目的是可以分别测量机器人所横跨的机侧和焦侧2列火道的直行温度 。

图2 云台三维模型
云台如图2所示,其由2个带谐波减速器的42步进电机、带转角镜的红外比色测温仪、带485通讯功能的6轴陀螺仪以及摄像头组成。转角镜可以让水平放置的测温仪观测到竖直向下的立火道底部测温区间,再由2个步进电机调整测温仪物镜的焦点位置,其中谐波减速器的使用显著降低了使用普通减速器的齿轮间隙所造成误差,提高了定位精度。
由图2可以看到2个步进电机的轴互相垂直,调整两电机使经转角镜折射的测温光路沿着图中的坐标系运动,即可将测温范围覆盖到位于转角镜正下方的立火道底部的任一位置。
1.2 测量位置的选择
如图3所示,图中上部较亮环形区间为烧嘴,这一区间的温度过高,不适合作为测量区间,图中左右两侧的高亮区亦不适合。最暗的2个矩形区间为斜道口,温度最低。

图3 焦炉燃烧室底部俯视图
对于复热式炼焦炉,最佳的测温区间是图中亮度介于烧嘴和斜道口两者之间的空旷区间[13],从图中可见的工字型区间均可以作为测量点,故统一将测温区间选在图中下虚线圆所标识出来的位置。
2 测温算法
图4为云台的实物图,此时的转角镜是朝上的,转角镜中部有可以透过光线的小块玻璃片,测温时转角镜是朝下的,接收从正下方车体嵌入的防尘玻璃盖板透过的红外光线和立火道底部图像信号。测温分为2个步骤,即先标定,再测温。
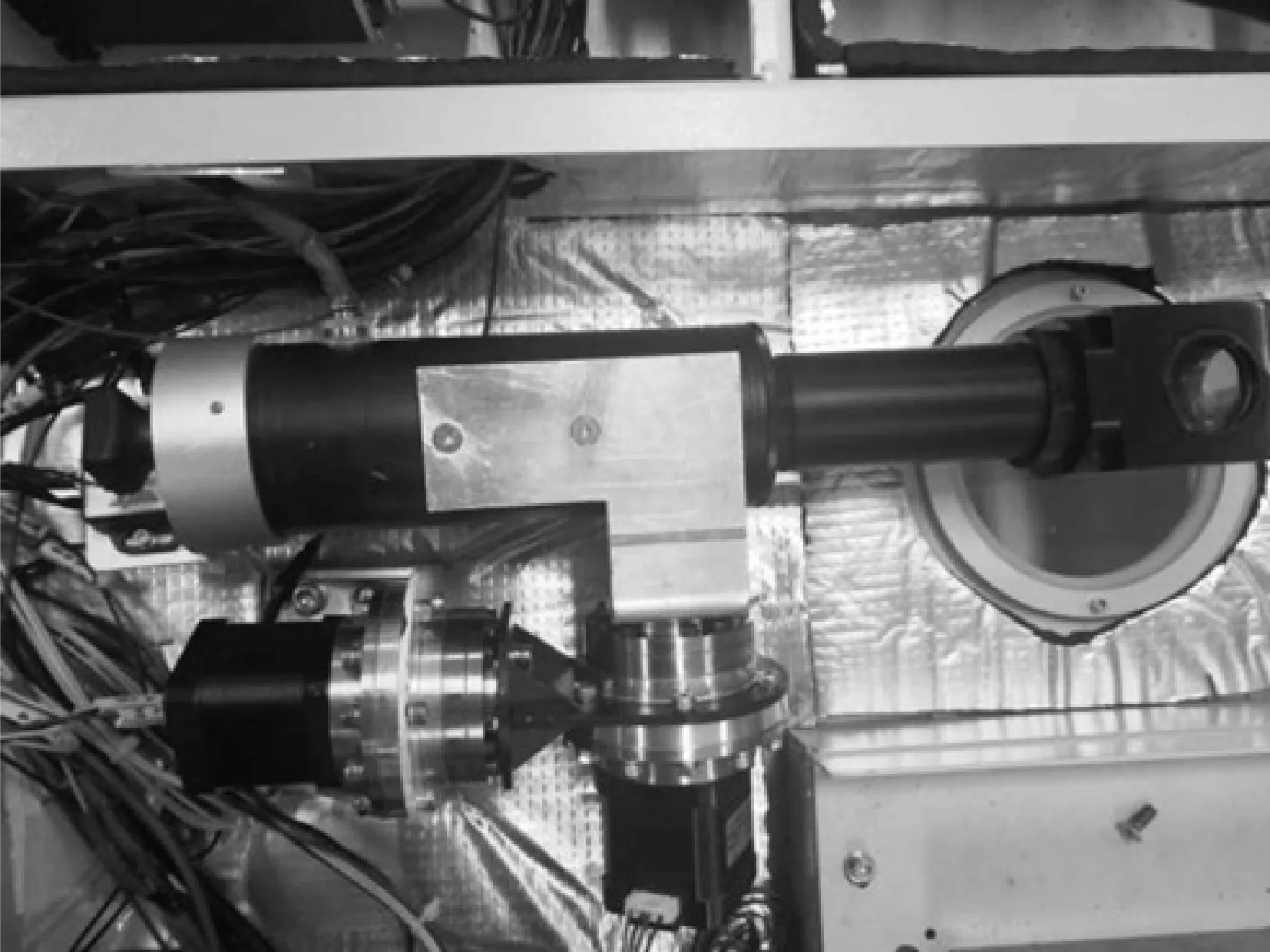
图4 云台实物
2.1 标定算法
图5为标定算法流程图。在正式进入自动温度采集前,需要进入标定模式,在这一模式下,会按照标定算法将所有的待测看火孔的测温点的坐标以陀螺仪姿态角的形式依次存储下来。首先是测温轨道机器人依次到达各个看火孔上方,在揭盖完成后,操作人员手持图像接收设备一边观察,一边通过操纵键盘调整云台两轴的转动,使测温光路中心对准最佳的测温点,再令PLC将从陀螺仪读取的云台的姿态角数值记录,作为该看火孔的最佳测温点的坐标。用这种方式将所有待测看火孔的测温点坐标全部标定完成后可供之后的自动测温调用。
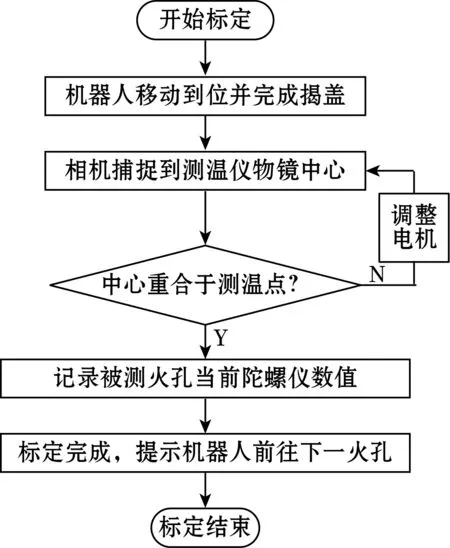
图5 标定流程图
2.2 自动测温算法
图6为自动测温的算法流程图。在标定算法的基础之上,自动测温时,会比较算出当前陀螺仪的姿态角数值和标定值的差值,若某一角度方向上两者之间存在偏差,就会使该方向上的步进电机转动一个角度,从而消除该方向上的角度偏差,不同方向上的调整都是基于此原理实现的。这样就完成了云台对当前看火孔测温点的自动定位。之后,再令测温仪扫描测温区域并读取温度,确保可以读到多组温度数值,保证在测温仪与最佳测温点即使有一定偏差的情况下依然能读到准确的温度值,最后加权平均值作为当前看火孔所采集到的温度,上传给上位机。
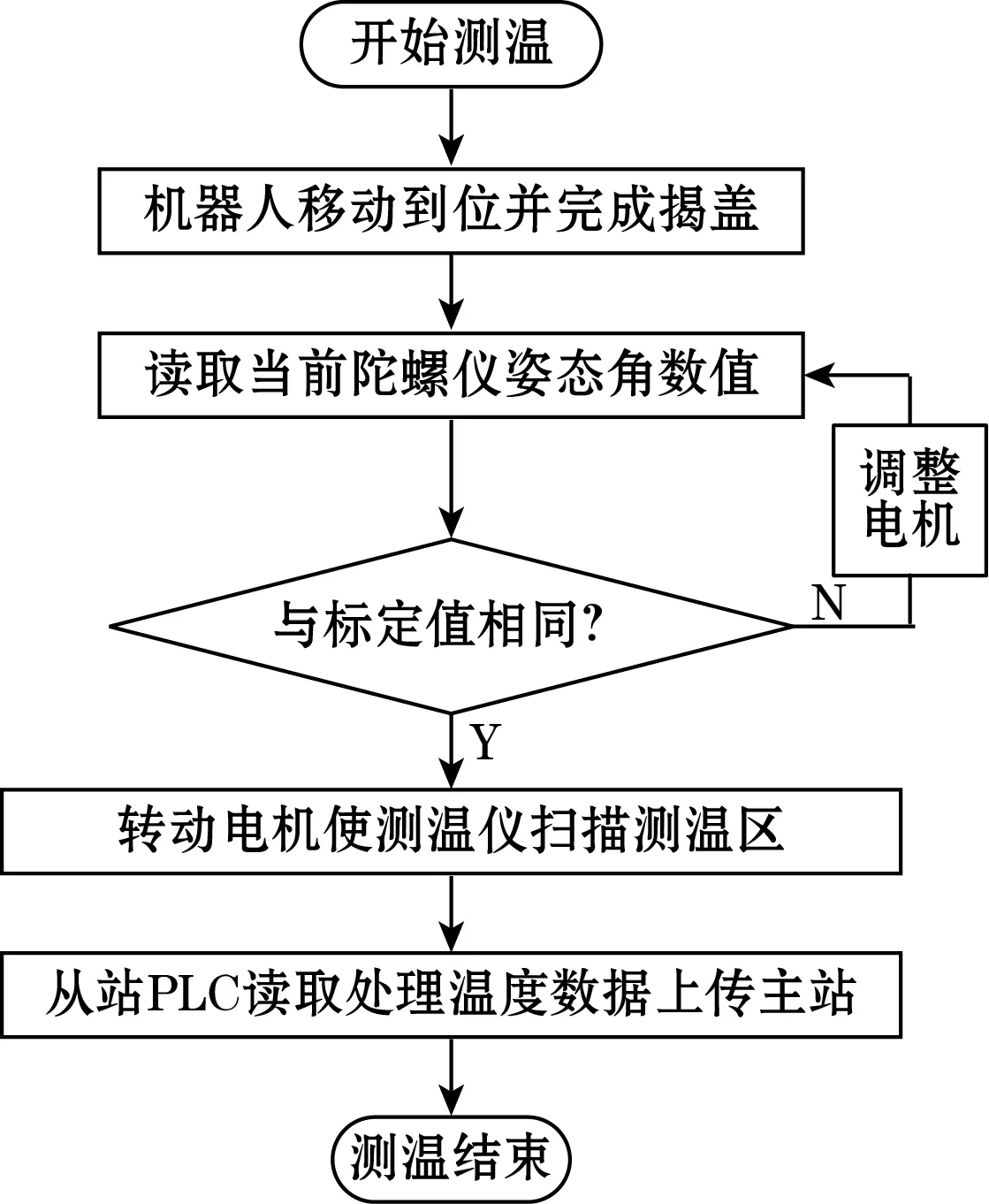
图6 自动测温流程图
3 程序实现
3.1 陀螺仪和测温仪的通讯
PLC与陀螺仪和测温仪是通过RS485的串口通讯方式进行数据传输的。由于陀螺仪与红外比色测温仪的通讯波特率不同,数据、命令格式也不同,同一串口进行通讯时需不断切换波特率,通讯数据略有延迟。解决方法是先读陀螺仪数据,比对标定值,计算输出脉冲,实时读取运动数据,到测量区域后,不再读陀螺仪数据,只读红外比色测温仪数据。区域扫描测温时,不读陀螺仪数据,只读测温仪数据,这样处理一次定位测量只需切换一次通讯波特率,提高了不同设备的使用效率。
3.2 步进电机的控制
根据太钢7.63 m焦炉的结构,从焦炉顶面到立火道底部的距离约为9.29 m,燃烧室内部宽度约为0.55 m,根据测算,使物镜中心对准立火道底部的边缘时,云台电机的摆幅最大不超过3.39°,如图7所示。

图7 测温示意图
这要求步进电机的控制应十分精确,因此为步进电机配装了减速比为50∶1的减速器,同时步进电机驱动器采用最大的32细分、6 400 Pulse/rev,即PLC每输出6 400个脉冲,步进电机转1圈,再考虑减速器的作用,每脉冲的对应的偏转角度可达到0.01°。
步进电机的运转可以由操作人员在标定时手持按键键盘来调整测温仪对准立火道测温区。自动测温时,为保证测温仪物镜中心即使遇到外部干扰依然能保持在最佳的测温区间,要求根据陀螺仪当前回传的姿态角数值与标定值的偏差及时调整步进电机。主站传来移动到看火孔正上方的信号后,根据当前传送来的看火孔序号调用对应的标定坐标值,计算绕X和Y两电机轴转动的角度,各自当前值与标定值的差值分别按照式(1)计算,就可以得到各电机需要调整的脉冲数,结果的正负符号表示调整方向。
(1)
式中:θ标为姿态角标定存储的值;θ现为姿态角当前读取的值;j为步进驱动器分辨率,Pulse/rev;i为谐波减速器减速比。
调整完成后测温仪物镜中心已落在了上文提及的测温点,再让测温仪扫描一个约1°的轨迹后即可完成测温。
4 实验测试
前期由于模拟焦炉顶部的情况非常困难,在实验室阶段验证了云台对测温点定位的精度符合要求后,随即前往太钢9号焦炉现场对测温机器人设备进行了安装和实地测试。如下图8所示。由于炉面灰尘较大,此时的机器人是有防尘盖的,并且在上面临时放着按键键盘,方便调试。

图8 机器人调试图
最终的调试阶段完成之后,按照焦炉的测温工艺对测温的准确度进行了测试,以验证测温云台所测得温度的准确性和可靠性,并得到了焦侧的曲线图,如图9所示。

图9 焦侧直行温度曲线图
从图9可以看出,所测温度大致在上限1 390 ℃和下限1 260 ℃之间波动,计算该时段的温度平均值约为1 318 ℃,根据9号炉当月标准温度为1 309 ℃,焦侧温度理论上也应偏高,所测焦侧温度的平均值符合标准温度±10 ℃范围内,可以判断所测焦侧温度合理。
实验证明,测温云台定位精确可靠,测得的直行温度数据基本符合标准温度,测温云台可以作为人工测量方式的替代,但仍需改进。
5 结论
测温机器人通过搭载安装了电子陀螺仪的精密云台,结合陀螺仪标定数据与当前数据的比较,计算出精密云台的控制脉冲的方法,实现了测温仪自动对准立火道测温区,较好地解决了由于焦炉炉顶在高温下的变形,使在不同的立火道上方测温机器人的倾角不同,并且不同立火道的变形量也不同,导致固定在测温机器人的测温仪很难对准测温点的难题。验证了利用陀螺仪定位的新型测温云台系统的可行性,推动了用轨道测温机器人替代人工测量立火道温度的技术发展。
