浅谈激光点云数据在机器人定位上的应用
2021-05-18刘松徐梁周永荣孙军陈昊邓凯
刘松,徐梁,周永荣,孙军,陈昊,邓凯
(1.国网电力科学研究院有限公司;2.国网江苏省电力有限公司检修分公司,江苏 南京 211106)
科技的进步与电网系统的日渐发展,使得电力系统自动化程度不断提高,而国家对电力系统重视度,特别是智能化战略不断推进。在智能电网战略的部署中,变电站的大量日常巡检工作都逐步交由电力巡检机器人来完成,不仅提高了巡检效率,同时能降低人工运维成本,保证工作人员的人身安全。
本文提出了一种基于激光点云数据的定位精度测量方法,获取电力巡检机器人的空间点云数据,并根据点云重心得出相对定位标志物的偏差,以此来衡量机器人定位导航精度指标,该方法经验证对形状不规则的物体的定位有很高的精度。根据实验测试结果分析,该测量方法的重复扫描误差被控制在2mm以内,具备在实际验证测试中的有效性。
1 定位导航精度测量方法技术原理
通过在检测区域的x和y两个方向上安装检测设备来获取机器人在两个方向上的激光点云数据。检测设备以一个高精度二维激光雷达为基础,通过一个俯仰装置转动激光雷达的扫描平面,从而实现对前方区域的扫描。采用旋转电机来实现扫描平面的驱动,同时对速度和角度进行严格的控制。由此可以使用两个方向的激光点云数据分割出机器人的点云。
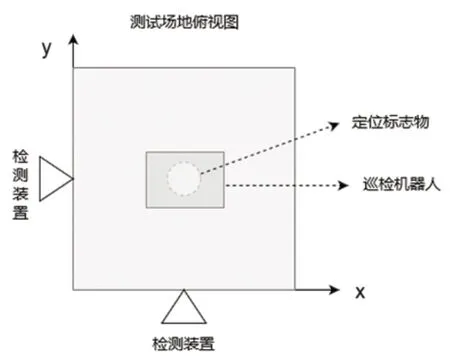
图1 定位精度测量方法原理示意图
由于机器人形状的不规则,采取对点云数据进行重心提取的方法以代表机器人的位置,继而分别计算机器人相对定位标志物在x、y两个方向上的偏差。
2 基于点云数据的定位算法
2.1 点云数据的生成
我们在x和y方向上分别对前方区域进行扫描,从而得到两个方向的点云数据。对于每个方向,激光扫描示意图如图2所示,激光扫描平面显示为平面S,激光平面S绕着x轴旋转,OA为激光扫描平面的激光束,由图可得,可查看到A这个点的三维立体坐标:
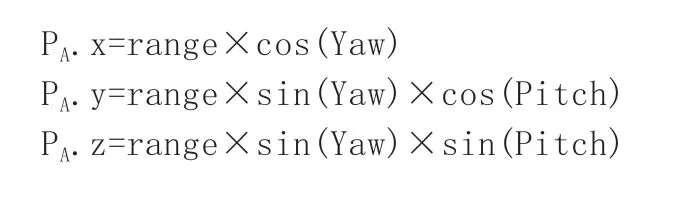
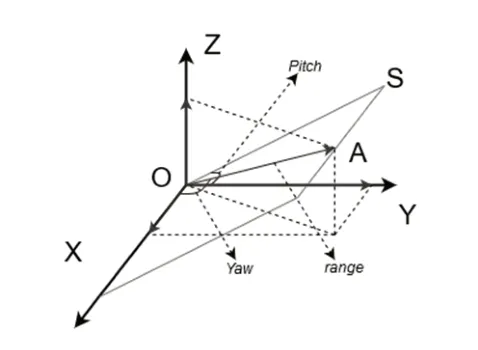
图2 激光扫描示意图
其中,该束激光的距离长度在图中显示为range,激光平面S与平面xoy的夹角为Pitch,在激光平面S上,OA与x轴正方向的夹角为Yaw。
2.2 定位标志物的位置提取
在机器人进入测试场地之前,在单个方向使用检测装置检测地面的定位标志物的位置。由于地面的定位标志物会反光,所以在获取的点云数据中会有一部分缺失,因此,定位标志物的位置提取十分简单,只需要计算缺失部分的中心作为标志物定位。
2.3 数据误差去除
采用窗口滑动滤波对点云数据进行处理,去除一些外界的干扰、噪声等外部因素引起的误差。窗口滑动滤波的步骤如下所示:
(1)对于原始点云数据P中的每个点pi,取它两侧宽度为k的点云数据作为点pi的窗口。
(2)计算pi窗口内数据的平均值:

(3)计算pi窗口内数据的方差并存入数组:

(4)得到每个点云数据的方差后,将方差与设定好的阈值vth比较。若vi<vth,便将点pi加入输出的点云集合O。
(5)集合O即为窗口滑动滤波后得到的点云集合。
2.4 点云重心的提取
由于获得的机器人点云数据比较稠密,并且机器人是不规则物体,需要多次计算机器人到达该定位标志点的点云数据的重心,通过比较该数据的方差,可获得机器人的定位导航精度的偏差。
因为只需要对比点云重心与二维定位标志物的关系,所以我们忽略z方向的坐标,而只在x和y方向上分别求取机器人点云数据的重心坐标并组合在一起。
在x方向上提取点云重心的x坐标:

在y方向只需提取点云重心的y坐标:

最终计算得到点云重心数据(x_g, y_g)后,可以通过此重心数据来衡量机器人的定位精度。
3 实验及结果分析
3.1 实验设置与数据采集
为了验证本文所提方法的合理性与正确性,实验环境以国内某电力实验室为基础,测试设备有x、y方向的高精度定位设备、无线路由设备、数据库服务器、应用服务器和实验管理分析系统。定位导航精度测量方法程序流程图如图3所示。
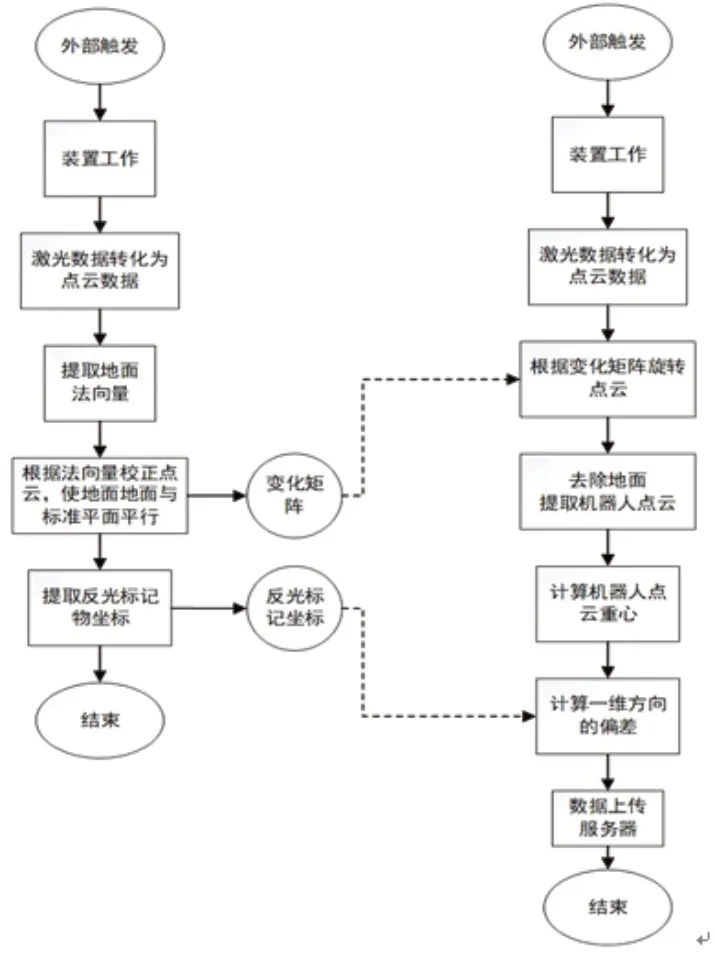
图3 实验流程图
实验的检测区域为2m×2m的空地,在检测区域中设有定位标志物,并将此标志物点设为导航点。在检测区域的x轴和y轴方向分别放置两个定位导航精度检测装置,用于检测x轴和y轴这两个方向上的定位误差。将装置上电工作,等待机器人进入检测区域,待机器人停止后,系统开始扫描检测。上位机的界面上会显示出机器人点云重心相对定位标志物的偏移量结果。
3.2 实验结果分析
为了衡量定位精度测量方法的测量精度,对于同一固定的定位标志物,使巡检机器人行驶到该位置,系统多次重复测量,得到其x轴与y轴方向的误差。测试结果如表1所示。
画在二维平面上如图4所示,每张图片代表巡检机器人定位到同一视觉标志物时,定位装置多次检测到的机器人点云重心的位置。
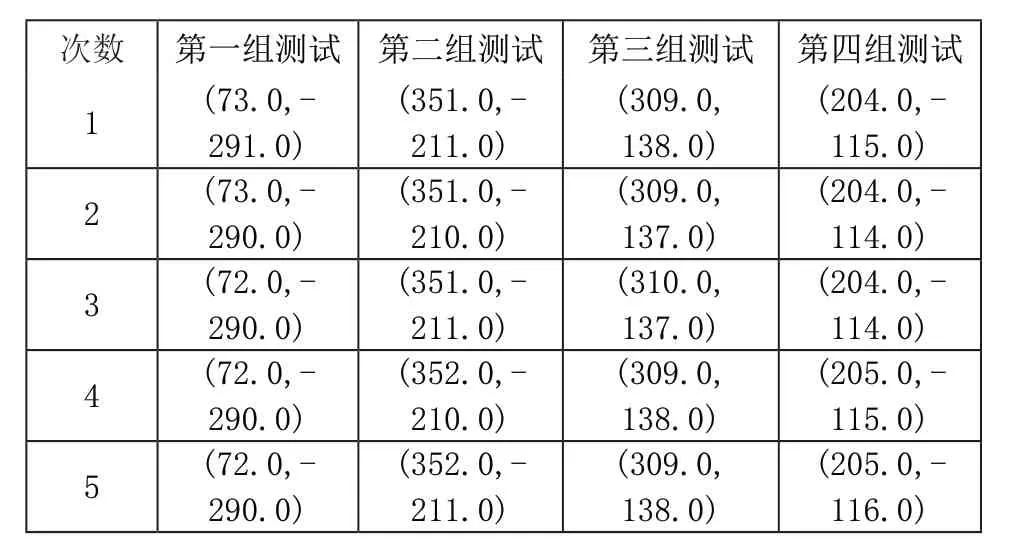
表1 测试结果表格
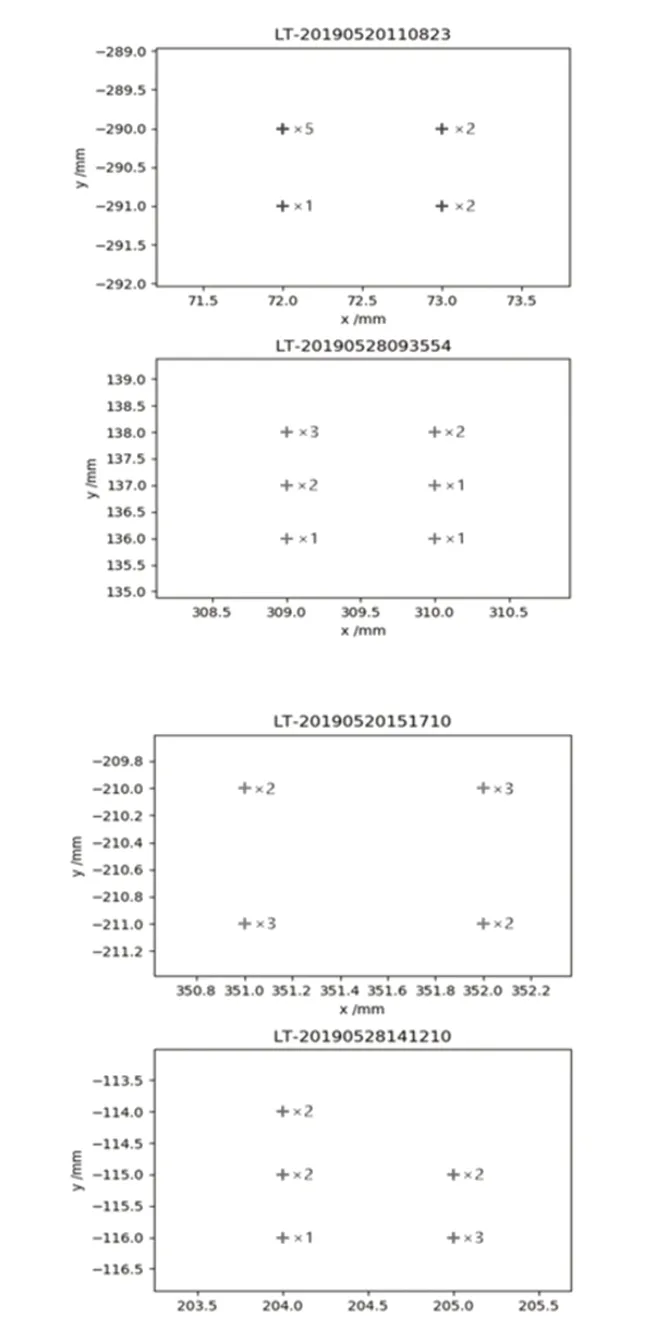
图4 多次测试结果
4 结语
本系统整合了巡检机器人的所有点云信息,最终体现为提取点云重心,解决了被测物体形状不规则的问题。经实验测量,其在一维方向上的偏差在2mm以内,完全可以满足测量精度的需求。且激光测量的精度高,性能稳定,原理简单,在电力巡检机器人中获取的数据进行精度检测这方面有很好的作用效果。同时,此种检测机器人定位精度的方法也可以很好地应用到相似场景中,具有广阔的检测技术应用前景。