起重机械安全监控系统可靠性设计
2021-05-18
江苏省特种设备安全监督检验研究院 南京 210036
0 引言
2011年,为贯彻落实《国务院关于进一步加强企业安全生产工作的通知》(国发〔2010〕23号)的精神,原国家质检总局先后发布了3个文件,拉开了安全监控管理系统在起重机械行业内的运用序幕,经过多年的试点、总结和推广运行,形成了包括国家标准、安全技术规范检验要求在内的完整体系,这对保障起重机械安全运行,及时进行维护保养以及发生事故后的调查处理起着巨大作用。然而在日常检验中,有时也会遇到起重机械安全监控管理系统(以下简称监控系统)不起作用或发生故障的情况,除了部分厂家采用低档劣质元器件的原因之外,还与设计单位忽略可靠性设计有关,本文将对GB/T 28264—2017《起重机械 安全监控管理系统》中要求的几个关键单元如何开展可靠性设计进行介绍。
1 电源电路
电源电路在监控系统中为各类芯片/器件等提供电源和内部基准电压源,其自身的可靠性关乎各类器件能否正常工作。电源部分是整个监控系统中最容易受到干扰的地方,由于电源部分一般是从供电电网变换得到,而起重机使用现场的电网往往污染严重,电动机、变频器等产生的干扰极易耦合到供电电网电路中,通过监控系统电源电路引入到系统中,从而导致整个监控系统的可靠性降低。对于电源电路的可靠性设计,除了传统的滤波、接地和屏蔽等措施外,还可以通过采用电源监控电路来提高电源电路的可靠性。
1.1 基于电源监控芯片的电源监控电路
随着技术的发展和要求的提高,现今的芯片向低电压、低功耗、高性能的方向发展,如DSP芯片等对工作电压的要求非常高,一般都要求电压偏差不超过5%。例如芯片的供电电压为3.3 V,则电压偏差不能超过0.165 V。否则一旦工作电压超出这个范围,长时间工作易缩短使用寿命甚至烧毁。电源监控芯片的作用主要是针对电路中工作电压+5 V/+3.3 V及各级内核电源+2.5 V/+1.8 V/+1.2 V进行电压的监控及失效防护。当各级电源电压因电路元器件随机失效,导致相应电源电压输出中断或跌落时,一旦实际电压值低于门限电压值,电源监控芯片将产生复位信号,对系统进行复位,保证系统进入安全状态。电路示意图如图1所示。
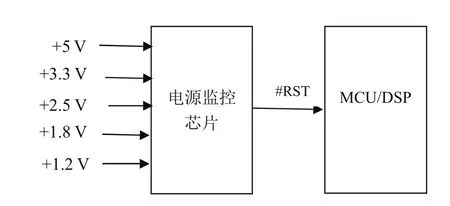
图1 基于电源监控芯片的电源监控电路示意
1.2 基于主控制器模拟量电压采集的电源监控电路
该电路主要利用主控制器(MCU/DSP等)自带的A/D转换功能,对电路中系统工作电压如+5 V/+3.3 V电压进行采集并监控。当系统工作电压因电路硬件随机失效导致电源中断或低于相关门限阈值时,主控制器根据采集的异常电压值,启动相应故障-安全防护措施确保系统进入安全状态。这种电路适用于因电路布局布线空间受限,无法采用外部电源监控芯片但又需要对系统电压进行监控的硬件电路模块中。采用此电路有限制条件,首先执行电源电压采集任务的主控制器(MCU/DSP等)内部须带有A/D采集功能。其次是执行电源电压采集任务的主控制器(MCU/DSP等)须采用和被监控电压不同回路的电源供电,以确保其供电电源的独立性。电路示意图如图2。
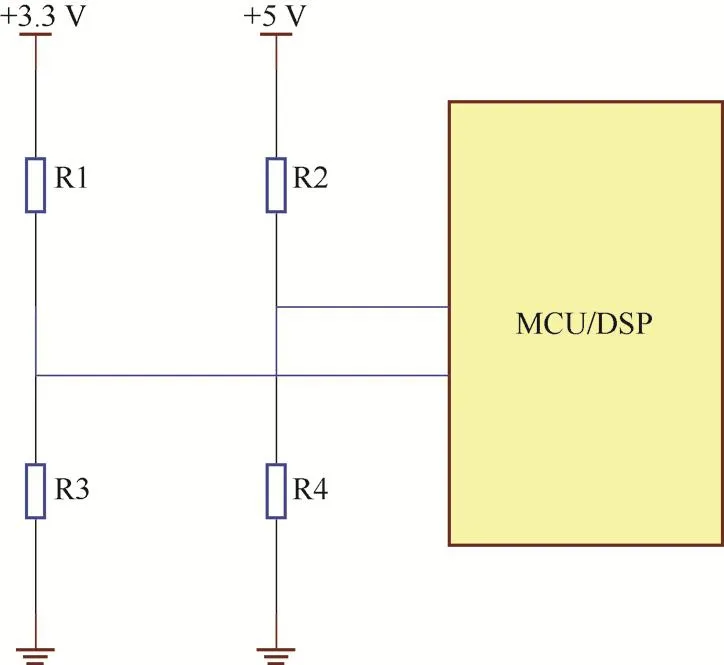
图2 基于模拟量电压采集的电源监控电路
2 输入采集电路
监控系统中的信息采集单元需要将各传感器和其他待测设备的模拟或数字量自动采集信息进入信息处理单元。一般而言,数字量可直接进入信息处理单元,而对于模拟量,还需先进行A/D转换,将模拟量变为数字量以便于系统处理。在模拟量进入A/D转换器前增加一个采样保持电路,以抑制由放大器干扰带来的转换噪声,降低模数转换器的孔径时间,提高模数转换器的精确度、消除转换时间的不准确性。其电路设计是基于动态采集的采集电路,对现场环境中的数字量(如开关量)/模拟量进行采集。动态采集的安全设计思想是系统对外生成动态脉冲门控信号,该门控信号对外部输入信号进行调制,一旦输入采集通道发生硬件随机失效,或因为外部强干扰,出现粘连或冻结情况时,系统均采集不到动态脉冲,此时会将系统输入置成安全状态值,从而保证系统安全。
如图3所示动态采集电路示意图,当外部输入为0 V时,系统采集到0;当外部输入为24 V时,系统采集到动态脉冲。从而对外部通道的各类失效、尤其是冻结故障进行有效识别和监控。
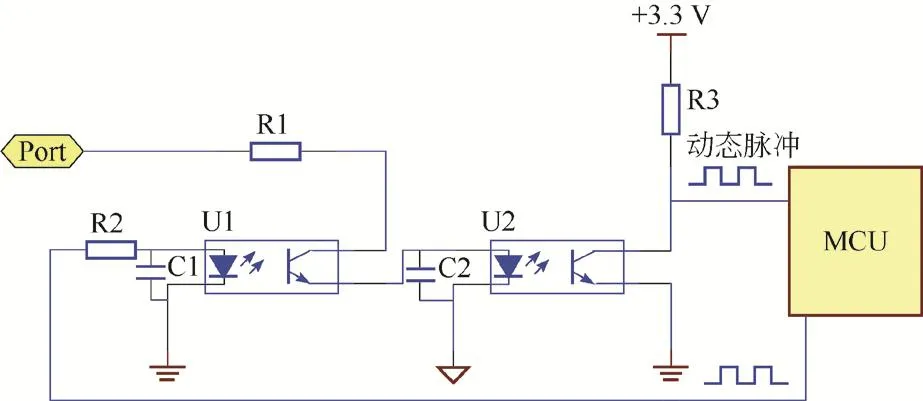
图3 动态采集电路示意图
3 输出控制电路
安全监控系统控制输出单元是输出控制信号的装置,通常包括晶体管型和继电器型两种输出模式,用于对外部设备提供驱动电压或开关控制。由于控制输出单元对应系统的止停控制功能,其不响应或误动作都会影响到起重机整机的安全运行,故除了传统使用光隔器件外,本文介绍一种控制输出电路中增加安全与门的方法,如图4所示,采用安全与门这一固有式故障安全器件,对输出通道上各类硬件随机失效进行有效防护,一旦输出通道上发生任何失效,DO通道输出值都将导向故障-安全状态,从而保证系统安全。
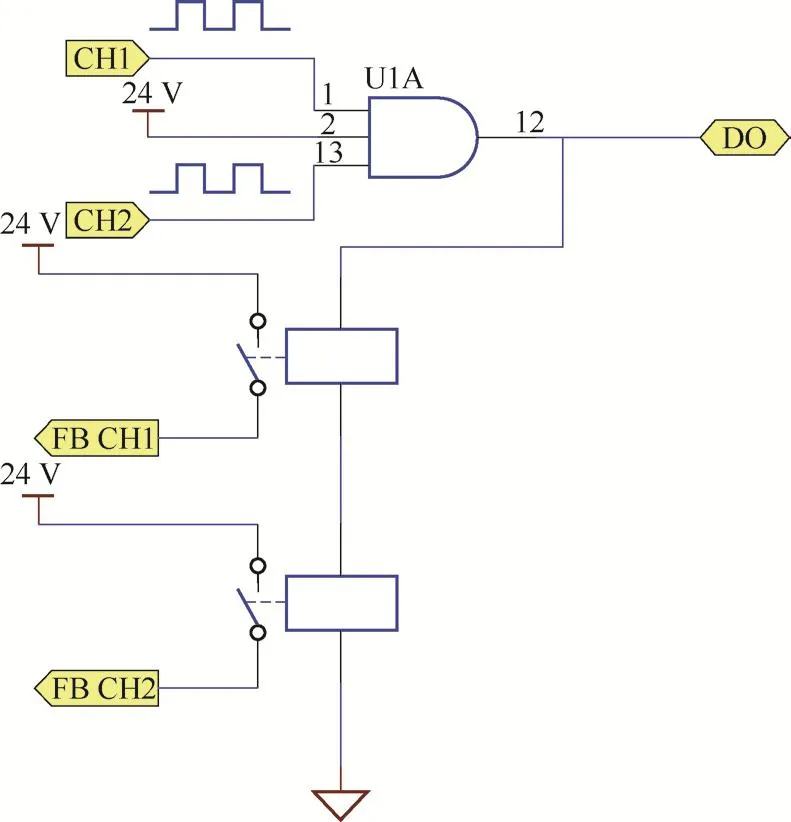
图4 安全与门输出控制电路
4 软件系统的可靠性
由于起重机使用现场复杂,无论监控系统的信息处理单元采用单片机(含ARM)、PLC或工控机,通常都存在各种大量的干扰源,容易产生软件时序错误或寄存器中内容突变等问题,导致程序跑飞或进入死循环。因此在保证硬件可靠性的基础上也需要提高软件的可靠性。
软件可靠性设计首先得提升软件自身的本质可靠,设置合理的时序,减少程序自身错误和缺陷。其次是采用软件抗干扰措施,例如采用冗余指令、软件陷阱和程序监视定时器等。
程序监视定时器又称看门狗(WDT,Watch Dog Timer),实质上是一个需要定时清零(喂狗)的计时器,否则会触发复位信号。看门狗功能的实现可分为硬件和软件两种方式,或是两种方式结合。如图5所示,硬件看门狗是采用专用外部芯片,在主控制器(MCU/DSP等)外部,选择独立的硬件看门狗芯片(如MAX813L、MAX708等),对主控制器内部程序运行情况进行监控。一旦主控制器内部程序软件出现异常,主控制器将无法继续给看门狗芯片发送喂狗指令,当超过设定的时间限值,看门狗芯片将输出复位信号并对主控制器进行复位,确保系统进入安全状态。软件看门狗是利用主控器件(MCU/DSP/PLC等)内部定时器进行计数,一般使用定时器中断(PLC有专门的指令,如S7系列采用的WRD指令),软件看门狗的优点是无需外加芯片,动作时仅是程序重新运行,而硬件看门狗需要对主控芯片进行上电重新复位。但软件看门狗毕竟是程序,如果外部干扰过大会受到影响,导致功能失效,最好还是采用软硬结合的方式。
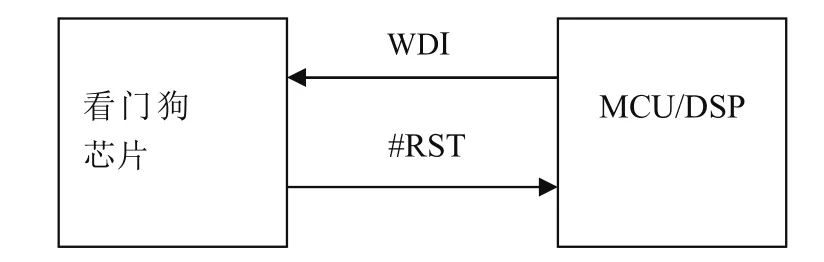
图5 基于外部独立看门狗芯片的硬件看门狗监控电路示意
5 结语
随着起重机械电控系统向智能化方向发展,其与安全监控管理系统的结合越来越紧密,对电控系统的可靠性要求也越来越高。监控系统的可靠性关系到起重机械是否能够安全运行,而目前国内起重机械电控系统设计规范还不够完善,特别是针对安全监控系统的可靠性设计尚无明确的要求,需要结合行业特点进一步的研究。
