改进直觉模糊TOPSIS和三支决策的威胁评估
2021-05-18吴文海郭晓峰周思羽高丽
吴文海, 郭晓峰, 周思羽, 高丽
(海军航空大学(青岛校区) 航空仪电控制系, 山东 青岛 266041)
现代化多机协同空战模式下,威胁评估需根据敌方目标属性、状态等态势信息,分析目标作战能力,量化威胁程度,评判目标威胁,为作战决策提供理论依据,以提高空战成功率及自身生存率,具有重要的军事意义[1]。
典型的威胁评估方法包括云模型[2]、贝叶斯网络[3]、神经网络[4]、多属性决策[5]等。然而现代空战中,战场环境复杂,作战形式多样化,所获得目标属性、状态等态势信息具有模糊、可变、不可靠等特性,需动态、高效地处理威胁评估过程中的不确定性信息[6]。基于直觉模糊集(intuitionistic fuzzy set,IFS)[7]的评估方法能够有效地解决态势信息中的不确定性问题,吸引众多学者进行大量研究。Zhang等[8]提出基于直觉模糊熵和动态VIKOR相结合的威胁评估方法,实现对目标威胁排序;张浩为等[9]同时考虑主、客观因素对目标属性权重的影响,在直觉模糊数排序模型基础上,实现对目标威胁排序。然而,上述部分方法仅针对当前态势进行威胁评估,忽略了先前时刻的关联信息,无法获得全面、充分的评估结果;其次,部分方法未充分考虑未知信息对威胁评估的影响,基于距离测度的逼近理想解排序(technique for order preference by similarity to ideal solution,TOPSIS)方法考虑不充分;最后,上述方法仅对目标威胁排序,决策者需要主观判断目标优先级,但在复杂多变的战场环境下,决策者难以在短时间内确定攻击目标的优先级以及威胁等级,因此有必要为决策者提供科学合理的决策支持。三支决策[10]是基于人类认知的决策模式,将传统“非此即彼”的决策模式拓展到“接受-拒绝-延迟”模式。Liang等[11]提出一种基于毕达哥拉斯模糊集的三支决策模型;Hu等[12]将结构化粗糙集引入完整信息和不完整信息中,构建结构化三支逼近,与三支决策建立直接而明确的联系。但上述方法并未考虑多属性环境下不同目标损失函数的差异,无法给出多属性环境下合理的决策分类。
针对上述问题,本文提出一种改进直觉模糊TOPSIS和三支决策的威胁评估方法。首先,改进TOPSIS的距离测度和属性权重因子,引入可靠度信息计算距离测度以提高目标区分能力,采用最大偏差法计算属性权重因子以突出各属性重要程度,根据各目标的相对贴进度获得最终威胁排序;其次,策构建融合多时刻、多属性的聚合损失函数矩阵,设定风险规避系数,采用三支决策计算目标决策阈值,获得决策分类结果。最后,通过算例仿真及比较分析,验证了本文所提方法有效性和合理性。
1 基础知识
1.1 直觉模糊集
定义1[13]设X为给定论域,则X上的一个直觉模糊集A为
A={〈x,μA(x),vA(x)〉|x∈X}
(1)
式中,函数μA(x),vA(x)为
分别表示A的隶属度和非隶属度,满足
0≤μA(x)+vA(x)≤1
(4)
此外,称πA(x)=1-μA(x)-vA(x)为A的犹豫度。
1.2 三支决策
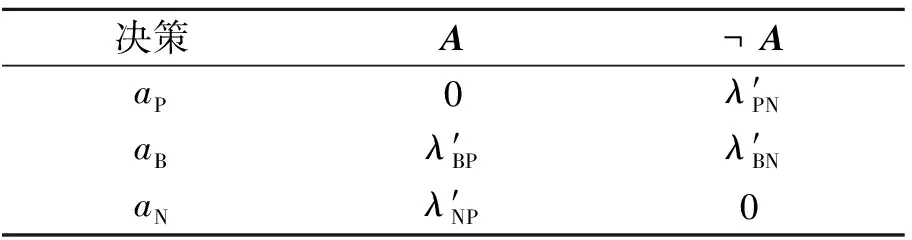
定义2[14]设x状态集合Ω={A,A},分别表示x属于或不属于A。决策集AC={aP,aB,aN},分别表示x∈POS(A),x∈BND(A)和x∈NEG(A),即正域规则、边界规则和负域规则,对应接受决策、延迟决策和拒绝决策。λPP,λBP,λNP分别表示x属于A时,决策aP,aB,aN的损失函数,λPN,λBN,λNN分别表示x不属于A时,决策aP,aB,aN的损失函数,如表1所示。
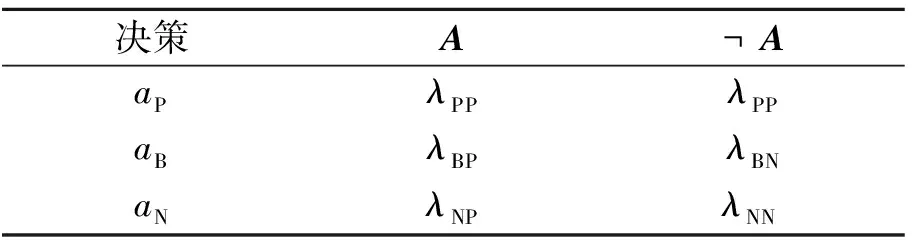
表1 3种决策损失函数
则三支决策的决策阈值α,β,γ为
进一步考虑,若β<α三支决策规则可表示为:
(P1) 若Pr(A|[x])≥α,则x∈POS(A);
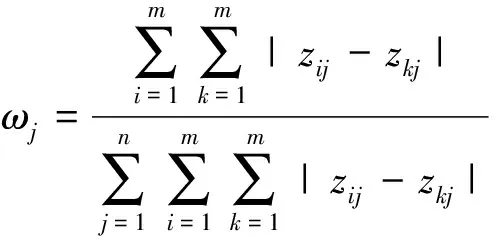
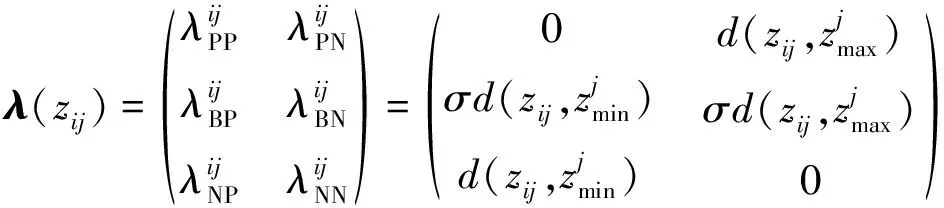
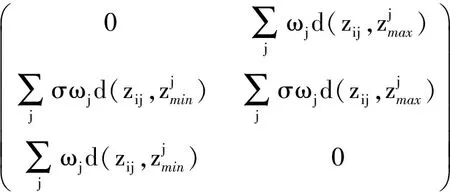
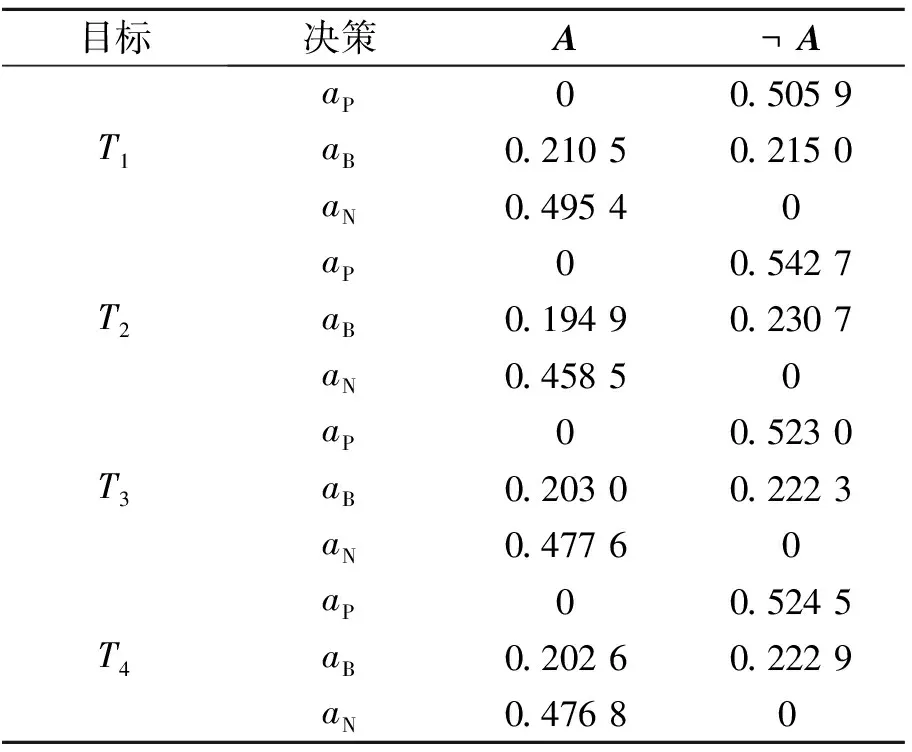
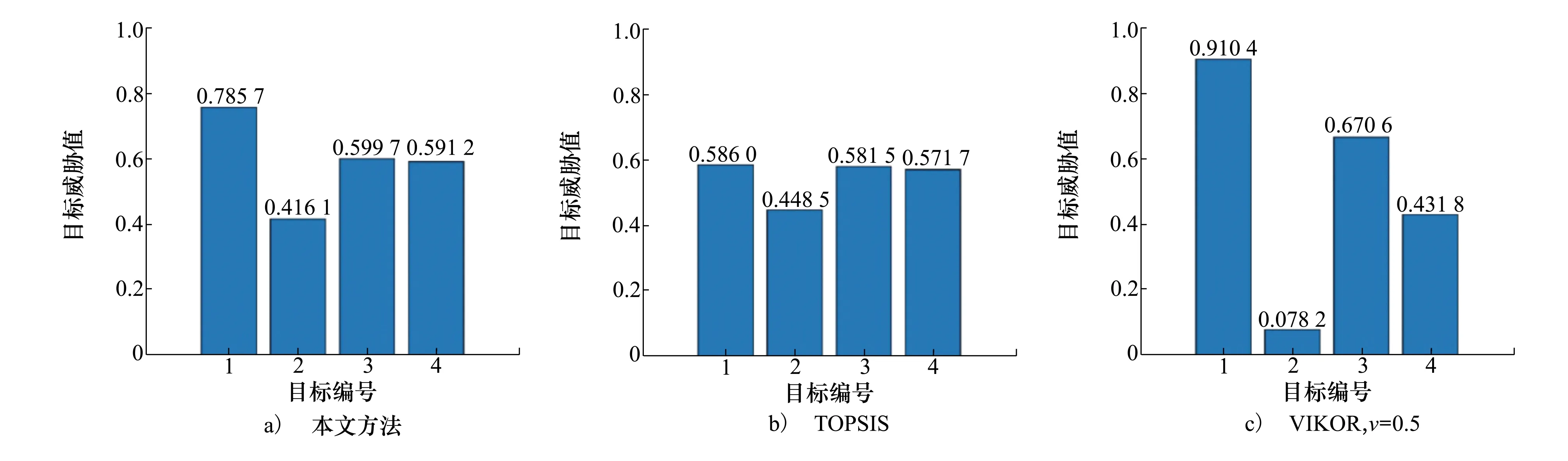
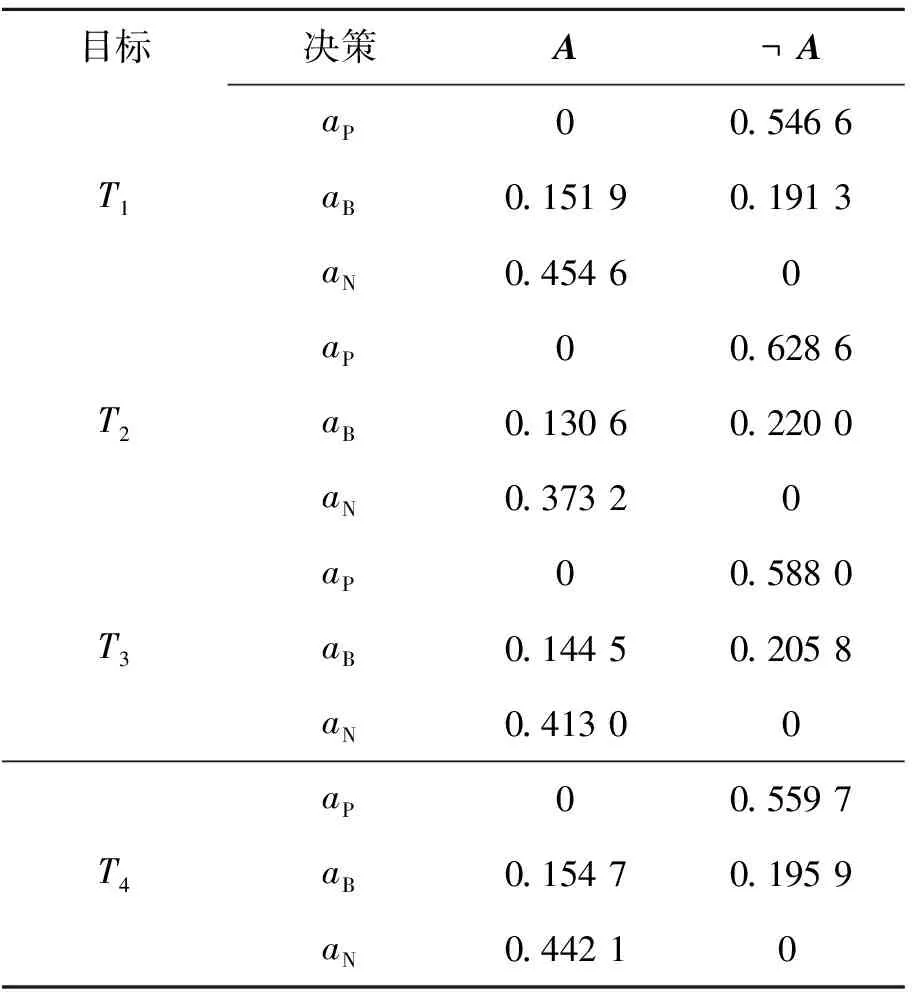
(B1) 若β (N1) 若Pr(A|[x])≤β,则x∈NEG(A)。 其中,Pr(A|[x])为条件概率。 本文所提方法改变传统“非此即彼”的评估决策模式,采用改进直觉模糊TOPSIS评估目标威胁,根据三支决策实现基于“接受-拒绝-延迟”模式的决策分类,核心包括计算各目标条件概率(威胁值)和决策阈值,其计算流程如图1所示。 图1 计算流程图 步骤1 构建综合直觉模糊评价信息矩阵。 随着空战进程的推移,目标威胁程度发生动态变化,各时刻态势信息均会对威胁评估产生影响,越接近当前时刻,其影响越为重要。为了兼顾各时刻的态势信息,获得全面而客观的威胁评估结果,对时间序列赋权重η=(η1,η2,…,ηK),tk时刻权重值为 (8) 设空战目标集为T={T1,T2,…,Tm},目标属性集为N={N1,N2,…,Nn},Z(tk)=(zij(tk))m×n为评价信息矩阵,其中zij(tk)=〈μij(tk),vij(tk)〉为tk时刻目标Ti属性Aj的直觉模糊数。则融合多时刻、多属性的综合直觉模糊评价信息矩阵为 Z=(zij)m×n=(〈μij,vij〉)m×n (9) 式中,μij,vij为 (10) 步骤2 计算综合直觉模糊评价信息矩阵正、负理想解[15]。 正理想解为各目标属性中威胁程度最大的解。效益型属性,正理想解取最大值;成本型属性,正理想解取最小值。则正理想解为 (11) (12) 负理想解为各目标属性中威胁程度最小的解。效益型属性,负理想解取最小值;成本型属性,负理想解取最大值。则负理想解为 (13) (14) 步骤3 计算目标Ti的相对贴进度。 设2个直觉模糊数A=〈μA,vA〉和B=〈μB,vB〉,则两者之间的距离测度为[16] (15) (16) (17) 式中,π2可表示为不确定度,1-π2即可表示为可靠度。 目标Ti的属性Aj与正、负理想解的距离测度为 (18) (19) 式中,属性权重因子ωj为 (20) 则目标Ti的相对贴进度为 (21) TOPSIS中,某一解与正理想解的距离测度越小、与负理想解距离测度越大,则该解越佳,因此可以通过计算与正负理想解间的距离测度来衡量直觉模糊集信息量的大小。 显然RC(Ti)代表目标Ti属于状态A的概率,因此目标Ti的条件概率为 Pr(A|Ti)=RC(Ti) (22) 步骤1 构建各目标各属性的损失矩阵。 根据(5)~(7)式可知,α,β,γ仅关注λPP,λBP,λNP或λPN,λBN,λNN之间的差异,而并非实际λ值。因此,可考虑一种特殊的转换损失函数,即λPP,λBP,λNP同时减去λPP,λPN,λBN,λNN同时减去λNN,则转换损失函数如表2所示。 表2 转换损失函数 则各目标各属性的损失矩阵为 (23) 步骤2 构建多属性聚合损失矩阵。 进一步结合属性权重因子,可获得目标Ti的多属性聚合损失矩阵为 (24) 步骤3 计算各目标决策阈值。 基于目标Ti的多属性聚合损失矩阵可获得三支决策阈值为 (25) (26) 则基于三支决策的目标决策规则可表示为: (P2) 若Pr(A|Ti)≥αi,则Ti∈POS(A),即目标Ti需优先攻击; (B2) 若βi (N2) 若Pr(A|Ti)≤βi,则Ti∈NEG(A),即 目标Ti无需优先攻击。 假设空战中,我方遭遇4架敌机T={T1,T2,T3,T4},选取3个连续时刻t={t1,t2,t3}的4种目标属性信息A={A1,A2,A3,A4},包括空战能力、角度威胁、距离威胁和速度威胁,具体数据如表3所示。 表3 t1~t3时刻目标属性信息 其中空战能力、速度威胁为效益型属性,数值越大威胁程度越高;距离威胁、角度威胁为成本型属性,数值越小威胁程度越高。 根据(8)式确定时间序列权重为 η=[0.200 0 0.266 7 0.533 3] 根据(9)式和(10)式构建融合多时刻综合直觉模糊评价信息矩阵为 根据(11)式和(13)式获得正、负理想解为 根据(20)式计算得属性权重因子为 ω=[0.303 8 0.158 7 0.209 2 0.328 3] 根据(18)式和(19)式分别得到目标Ti与正、负理想解的距离测度为 D+=[0.025 0 0.061 6 0.042 6 0.043 1] D-=[0.081 0 0.043 9 0.063 9 0.062 3] 根据(21)式和(22)式可获得目标Ti在属性A下条件概率为[0.758 7 0.416 1 0.599 7 0.591 2]。 根据(24)式可获得各目标的多属性聚合损失矩阵,如表4所示,其中σ=0.425。 表4 聚合损失矩阵 根据表4及(25)式和(26)式可以进一步计算各目标的三支决策阈值,结合各目标条件概率,结果如表5所示。 表5 决策阈值及条件概率 根据表5各目标条件概率可以得到最终目标威胁排序结果为:T1≻T3≻T4≻T2。基于决策规则(P2)至(N2),综合直觉模糊信息的三支决策结果为:POS(A)={T1,T3},BND(A)={T4},NEG(A)={T2}。根据三支决策结果可知,我方需要优先对目标T1和目标T3实施攻击或干预,无需对目标T2展开攻击,目标T4则需要根据对战场态势进一步分析后作出决策。 为了验证本文所提方法的正确性,将本文方法与TOPSIS[18]和VIKOR[8]的方法进行对比,结果如图2所示,其中VIKOR的决策机制系数取v=0.5。 由图2可知,基于TOPSIS方法算得各目标威胁值为:[0.586 0 0.448 5 0.581 5 0.571 7],目标最终威胁排序结果为:T1≻T3≻T4≻T2;当v=0.5时,基于VIKOR方法算得各目标威胁值为:[0.910 4 0.078 2 0.670 6 0.431 8],目标最终威胁排序结果为:T1≻T3≻T4≻T2。 VIKOR决策机制系数取v=0.1到v=1的结果如表6所示。 图2 威胁评估结果对比 表6 VIKOR结果 由表6可知,取v=0.2~0.7范围时,基于VIKOR方法的最终威胁排序结果均为T1≻T3≻T4≻T2。 2种方法的实验结果与本文结果一致,从而验证了本方法的正确性。 同时,从图2中可以看出,相较于TOPSIS方法,本文所提方法对目标威胁的区分度更高,能更显著地向决策人员反映空战过程中各目标威胁的差异程度,提高决策效率。其次,与TOPSIS和VIKOR方法相比,本文方法在对目标威胁排序的基础上,能够进一步对目标威胁进行分类,确定目标威胁的优先级,有效地为决策者提供基于理论计算的科学决策支持。 进一步实验分析,将融合多时刻的威胁评估结果与仅选取时刻t=t3威胁评估结果进行对比。由于仅选取t=t3时刻进行评估,态势信息不够充分,因此σ=0.35。 单时刻威胁评估的聚合损失矩阵如表7所示,三支决策阈值和各目标条件概率如表8所示。 表7 单时刻聚合损失矩阵 表8 单时刻决策阈值及条件概率 由表7可知,与融合多时刻聚合损失矩阵相比,仅选取t=t3时刻态势信息情况下,A中aN均减小,A的aP均增大,从而使得表9中α增加β减小,导致决策的选择需要依靠更多态势信息支撑。基于决策规则(P2)至(N2)的分类结果为:POS(A)={T1},BND(A)={T3,T4},NEG(A)={T2},表明目标T3和T4都需要进一步分析后作出决策,与上述分析一致。根据表8得到目标最终威胁排序结果为:T1≻T4≻T3≻T2,与融合多时刻的评估结果存在差异。综上说明,仅选取单时刻态势信息进行威胁评估不够全面,评估结果有失偏颇。 为了更进一步评估本文方法的动态性,将t2时刻目标T2速度威胁取值由〈0.65,0.20〉改为〈0.88,0.05〉,即目标T2速度威胁增加,其三支决策阈值和各目标条件概率如表9所示。 表9 决策阈值及条件概率 由表9可知,目标最终威胁排序结果为:T1≻T3≻T2≻T4,三支决策分类结果为:POS(A)={T1,T3},BND(A)={T2,T4},然而采用单时刻评估的结果并未有所变化。因此,本文所提方法能够将空战过程中态势信息的动态变化引入评估中,使所得结果更加合理。 针对现代空战威胁评估问题,提出了一种融合多目标、多时刻、多属性的改进直觉模糊TOPSIS和三支决策的威胁评估方法,不同于其他威胁评估方法仅对目标威胁程度进行排序,本文利用三支决策理论进一步对目标威胁分类,在激烈的空战环境下,提高飞行员决策效率,赢得战场主动权。 1) 改进TOPSIS距离测度,引入可靠度信息计算距离测度,提高目标区分能力; 2) 改进属性权重因子,采用最大偏差法评估各属性信息量大小,确定各属性重要程度; 3) 构建聚合损失函数矩阵,计算目标决策阈值,获得三支决策分类结果,有效地为决策者提供基于理论计算的科学决策支持,改变传统“非此即彼”的决策模式; 4) 仿真结果验证了本文方法的正确性,对比分析表明本文方法具有更好的显著性,评估结果科学合理。2 改进直觉模糊TOPSIS和三支决策的威胁评估
2.1 算法流程

2.2 改进直觉模糊TOPSIS条件概率计算












2.3 三支决策阈值计算
3 算例仿真






4 结 论
