基于VQ- 1560i 机载扫描系统获取点云数据的质量分析
2021-05-16张广振
张广振
(新疆维吾尔自治区第一测绘院,新疆 昌吉 831100)
0.引言
传统DEM 生产方式是主要通过获取航空影像数据,立体下测制等高线,不仅作业效率低且受人眼有视差的影响精度受损。直到航空点云扫描系统的问世可以同时获取影像数据和点云数据,且影像数据仅作为点云数据的辅助数据主要用于在点云数据下识别大量地物信息辅助测绘地物,大量带有的地面点的坐标及高程的点云数据直接制作的DEM 省去了许多作业流程,不仅效率高且精度相比影像数据也有所提升,同时DEM 精细度更高。VQ-1560i 机载扫描系统主要由当前国际最先进的激光(LiDAR)系统,也是国家基础信息中心指定点云数据获取仪器之一。本次获取LiDAR 扫描点云密度为每平方米优于0.25 个点,成图比例尺1∶10000,所获取数码影像地面分辨率优于0.5m,高程精度优于0.3m,最大误差小于测区内2 倍中误差。像片旋角不超过15°。航带重叠度应达到20%,最少为13%,没有绝对漏洞。最终利用CORS 站野外实测,通过野外实测点位与点云数据点位比对分析验证点云数据,无论是平面精度和高程精度均满足精度要求。
1.数据获取
1.1 检校场布设参数
由于点云扫描系统的硬件系统的要求,为获取精确的点云数据,飞行作业前需对获取数据进行精确的检校飞行。检校飞行要求满足高度角大于15°,卫星数量大于10 颗,并选择好的观测时段,位置精度衰减因子(PDOP)值小于4。构架航线相邻的平行航线需要有一到两条构架航线进行垂直构架以用来后期数据处理中保证各条航线的连接精确。检校场航线设计主要考虑飞行的方便、特征地物明显易于判读的因素。检校场飞行设计为2 个航摄高度(如图1 所示),14 条航线,其中低航高航线为6×4,共10 条,旁向重叠度大于60%,单向飞行;高航高航线为2×2,共4 条,旁向重叠度大于50%。检校场参数(如表1 所示):

表1 检校场参数

图1 检校场航线示意总图
1.2 点云数据获取参数
数据获取主要考虑到有以下因素可能对飞行质量及经济效益产生影响:(1)地形地貌;(2)摄区附近可用机场信息;(3)最后机载LiDAR 系统对飞机的一些特殊要求等,本次数据获取将分为2 部分进行航摄设计,数据获取参数(如表2所示):

表2 数据获取参数
2.数据质量分析
与传统的影像数据不同,点云数据直接带有平面坐标和高程的属性,若点云数据的质量差是没有办法,可以通过后期其他手段补救的,只能通过现场重飞或者补分重新获取数据提高质量。所以点云数据质量分析正确性直接决定后期数据是否可用。点云做以下分析要素,主要有POS 数据质量分析、检校场检校结果分析、点云数据覆盖分析、点云重叠度分析、点云密度分析、点云间距分析、影像质量分析、LiDAR扫描数据精度验证。
2.1 POS数据质量分析
点云数据对POS 的质量严重的依赖性,POS 数据质量直接决定了点云数据质量,POS 数据的解算方式有两种:一种是PPP 解算方式;另一种是通过架设地面基站采用差分方式解算POS 数据,同时差分方式POS 数据精度更高。所以本次数据获取通过架设地面基站的方式解算POS 数据,解算数据获取使用配套的POSPac MMS 软件对数据进行POS 处理解算,经检查空中GNSS 数据和IMU 数据均连续无中断,数据质量良好。航线的平面位置偏差和高程偏差以及PDOP值满足规范要求。检校场POS 解算成果中,检校场最终使用地面基站进行解算,且GNSS 数据和IMU 数据均无连续中断,数据质量良好。POS 数据精度结果(如表3 所示):

表3 POS 数据检查结果
2.2 检校场检校结果分析
检校场飞行完毕后通过数据处理,LiDAR 航线相邻航线接边高程差平均最大为7cm,对飞航线接边高程差值平均最大7cm,垂直航线接边高程差值平均最大10cm 满足要求。经过软件处理获取检校结果(如表4 所示):

表4 LiDAR 检校结果
2.3 点云数据覆盖分析
点云覆盖是点云数据获取质量的一部分,航线间点云覆盖旁向重叠度最小为15.28%,最大为67.69%,点密度最小为0.53pts/m2。点云覆盖图(如图2 所示):

图2 点云覆盖图
2.4 点云重叠度分析
点云重叠度检查,主要检查航带与航带间的重叠度是否满足要求,本次检查使用西安煤航遥感信息有限公司自主开发的专业质检软件并生成检查报告(如表5 所示),经检查一般旁向重叠范围15.28%-67.69%。

表5 点云重叠度检查报告
2.5 点云密度分析
LiDAR 点云密度涉及数据采集和数据处理及应用的整个链条,是数据质量的重要指标。激光雷达点云密度的作用类似遥感影像的分辨率,点云密度越大,则能探测更微小目标后期生成的DEM 越精细,点云密度报告(如表6 所示):

表6 点云密度
2.6 点云间距分析
本摄区分别在平地、居民地、山地,三种不同地形类别进行点云间距的抽样调查(如表7 所示)针对不同地形类别对点云间距的检查情况截图。平地抽样数量为25,点距统计平均值0.97m,居民地抽样数量为20,点距统计平均值1.02m,山地抽样数量为20,点距统计平均值0.83m,抽样整体平均值为0.945m,点间距统计(如表8 所示):

表7 针对不同地形类别对点云间距的检查情况截图

续表7:

表8 点间距统计表 单位:m
2.7 影像质量分析
RIEGL 公司生产的航摄仪为激光三维点云航摄仪,该仪器以获取激光三维点云数据为主,故所搭载的辅助框幅式相机未配备陀螺修正座架,影像数据俯仰角、旋偏角较大。经分析,数据获取的LiDAR 点云数据满足合同和规范要求,由于地面扬沙影响,原始影像质量不佳,调色后的影像无裂缝、不偏色、无色斑等情况,地物清晰可辨,该影像作为辅助影像,能够满足制作DEM 的要求,影像检查数据(如表9 所示):

表9 航摄影像检查
2.8 LiDAR扫描数据精度验证
为了检验点云精度,根据摄区面积,选取约占1 幅1∶10000比例尺地形图范围,面积约25km2。测区地形主要为居民区,平坦地形。测区地形主要为居民区,平坦地形。根据范围大小和分布情况布设2 个精度验证区,精度验证区位置(如图3所示),精度验证方式采用野外实测的方式。其中,项目之所以选取如此的两个精度验证区和野外实测主要基于以下几个方面:
(1)野外实地打特征检测点云数据,检测数据精度的可信度高,同时利用新疆CORS 系统,新疆CORS 系统是新疆自然资源厅经过多年的建设,国家质检部门验收,同时也经过多个项目的实践。实地采集地面点坐标,精度统计(如表10 所示):
(2)整个项目测区范围大小适中、地形较为复杂,根据实际情况选取了两个精度验证区;
(3)项目的精度检校区位于测区的中部及东南部,中部的精度验证区距离布设的地面基站较近,东南部的精度验证区是项目的较弱区,因此选取项目中部与东南部为精度验证区以充分保证项目成果精度验证的可用性及对比性。

图3 精度验证区卫星影像图位置
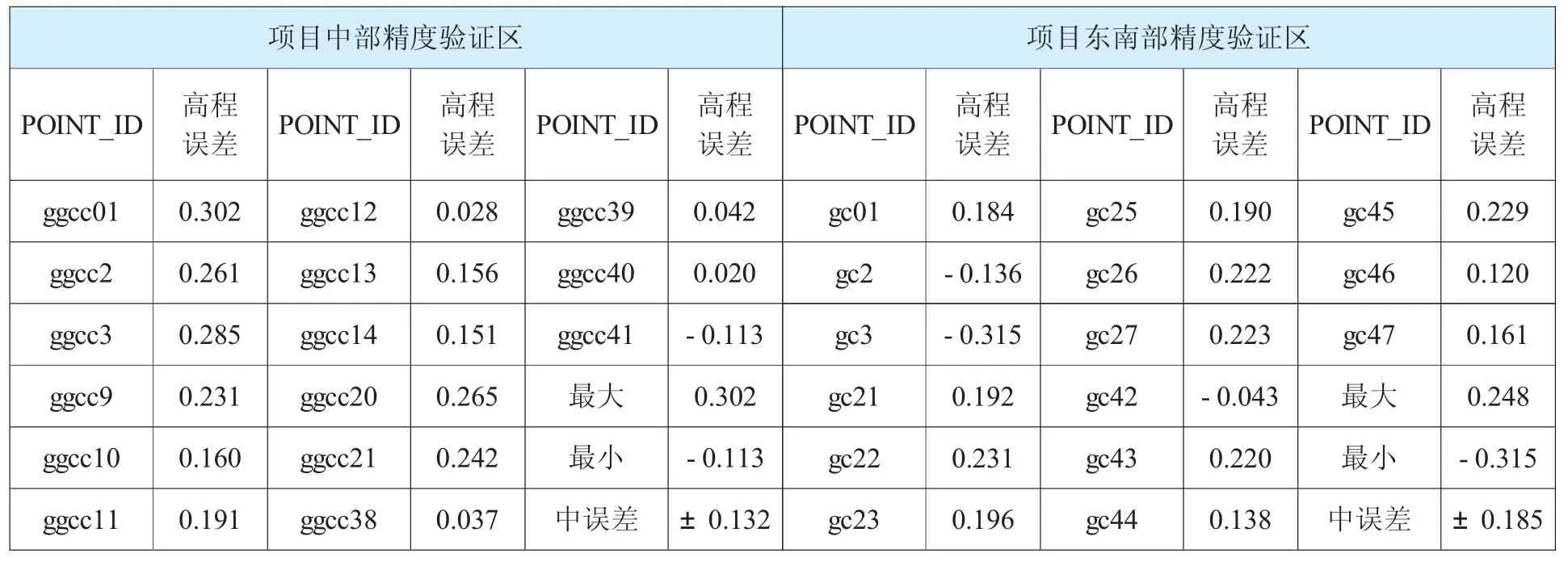
表10 高程精度检测统计表
2.9 数据质量质量综合评测
经对POS 数据分析、点云数据分析、影像数据分析、精度验证区分析中部精度验证区LiDAR 点云数据高程精度中误差为±0.132m,东南部精度验证区LiDAR 点云数据高程精度中误差为±0.185m。POS 数据质量、点云覆盖、点云间隔、重叠度、高程精度、影像质量等均满足要求。
3.结束语
通过本项目的质量检查结果验证了VQ-1560i 机载扫描系统获取点云数据精度可靠性且为后期DEM 制作提供可靠的数据。随着高精度数字高程模型(DEM)在国家发展建设中的作用日趋突显。点云数据获取将替代传统的航空影像获取,与此同时点云数据获取效率高、精度更高、数据处理方便等优势使DEM 制作流程简单化,为未来获取优质的地理信息数据提供了有力保证。
