大位移传感器的设计与验证
2021-05-15姬鹏飞武亚军
姬鹏飞武亚军
(上海大学力学与工程科学学院,上海200444)
随着近年来我国道路、铁路、各类管道等基础工程建设量的大幅增加,在此类施工中边坡、基坑等结构大量出现[1];基坑和边坡不仅是各种工程建设的基础,也是影响施工地点周围一定区域内已有建筑物、构筑物稳定性的重要因素,所以对土体监测变的尤为重要[2-3]。
在土体倾斜监测领域,目前应用最广泛的是传统测斜仪[4-5]。 使用测斜仪需要提前预埋测斜管,在测量提取数据时要有作业人员到现场下放测斜仪[5-6]。 因为使用测斜仪必须定点定时监测所以会受到较多因素的影响,比如人为因素、仪器因素和环境因素等,且做一次监测的读数时间很长,所得到的结果不一定准确[7-8]。
针对传统监测方法中存在的问题,不少学者提出了以各类传感器为基础土体监测方法,此类方法很大程度上避免了监测过程中出现人为失误的可能性,同时提高了监测过程的连续性和准确性。 2012年,庞学雷[9]等人发表一篇关于无线监测系统在上海迪士尼工程软基处理中的应用,探索无线远距离监测告别传统检测手段的实施办法。 文章中介绍无线监测系统可以分作,监测模块、传输模块、后台处理模块。 2019 年,施斌[10]团队采用光纤监测马家沟滑坡深部位移。 其研究结果表明光纤既可以作为分布式监测传感器同时也是传输数据的载体。 需要与桩体一起组合使用,但施工和保护难度很大。 江锋[11]等人发表一篇关于新型沉降板在高铁施工中的应用研究,虽然避免了老式沉降板易破坏难恢复的缺点,但其设计的新型沉降板仍存在防护罩受力不均,回填土过程中可能出现偏差倾覆。 其设计的新式沉降板分辨率达到1 mm。 都悦来[12]等人利用Flex 测斜技术设计的弯曲传感器,其精度在动态条件下绝对误差为1°~3°,相对误差为2%~6%。 近些年洪成雨[13-16]针对岩土测量,采用3D 打印技术运用不同的新材料制作了很多新颖的传感器对本研究提供了新的设计思路。
如今在土体监测领域探索的新技术仍有很多需要改进的地方。 大多数研究偏向于应用新的施工工艺、改进算法。 多数设计应用在岩土施工现场的传感器施工复杂、难保护、测量精度低、数据需要定期人工采集。 因此设计一个易操作,有高精度的传感器对于土体精确监测,小变形感知有着重要的意义。
本研究提出了一种新的基于Flex 传感技术的无线位移监测系统。 利用Flex 传感器的优良性质,独特地设计一种封装结构,将Flex 植入该孔结构中。 所设计传感器结构能保证Flex 可以契合于测斜或测沉降。 在结构设计时采用分布式的串联方式,使得每个传感器点与点之间的测量结果可以拟合土体的实际变形。 另外在使用传感器时需要注意,预埋时令所有组合传感器保持铅锤或水平放置。这样可以尽可能模拟一个未免的土体初始状态。 该系统对边坡位移,基坑倾斜进行无线实时监测,并且有着良好的精确度和准确性。
1 Flex 传感器原理介绍
传感器结构如图1 所示,可以分为传感元件,封装结构,以及数据传输模块。

图1
Flex 弯曲传感器是一种主要由导电元件和底物组成的条形电阻式传感器。 可以应用于Flex 弯曲传感器上的导电元件包括基于碳元素构成的油墨、颗粒、纳米管等,以及一些特殊金属,比如铜、银等,此外也可以使用导电橡胶作为导电元件。
Flex 传感器受到弯曲作用时,其电阻会产生变化。 存在如下关系:

式中:GF 是指应变影响因素,它的数值取决于传感器制作材料以及工艺;ΔR是电阻变化值;R为初始状态的电阻值;ε为机械应变。
由式(1)可知,决定选择何种导电元件的因素主要有两个,分别是导电元件与底物的附着性能好坏以及传感器使用环境与导电元件特性是否匹配。Flex 弯曲传感器的底物材料决定了整个传感器的柔韧性,底物与导电元件之间的附着性会影响Flex 弯曲传感器整体的电阻输出及使用稳定性。 当GF 一定时,电阻的变化与机械应变成正比。 通过Flex 传感器可以将弯曲应变转化为电信号,由于有良好的线性关系,可以达到测量变形的目的。
封装结构是采用3D 打印设备应用熔融沉积(FDM)技术,在软件中设计制作。 打印成型如图1(b)所示。 传感器的蓝牙模块与电脑的蓝牙连接后,打开客户端XCOMv2.0。 在界面点击打开串口后实时显示数据。
本测斜传感器设计采用定制的Flex 自制。 其中传感元件是采用Flex Sensor 4.5″单向弯曲传感器。 此传 感 器 规 格 为: 总 长112. 24 mm, 总 宽6.35 mm,厚度不大于0.43 mm,有效测量长度95.25 mm。 笔直状态下的电阻值为10 kΩ,弯曲时电阻变化范围为60 kΩ~110 kΩ,额定功率0.5 W,峰值功率为1.0 W。 电阻公差值为±30%,工作温度范围为-35 ℃~+80 ℃。 使用寿命为超过100 万次弯曲。分辨率为0.3°~0.4°。
传感器的标定过程为:首先将Flex 测斜传感器连接好以后,水平放置,待软件显示的数据平稳后,开始进行标定试验。
标定时将量角器与Flex 测斜传感器外壳紧密贴合,避免出现间隙造成标定误差,必要时可以用胶带在端头固定。 标定需要严格按照节点弯曲0°、5°、10°、15°、20°、25°、30°、35°、40°、45°、50°、55°、60° 来控制,且每次弯曲一个角度时需要停留10 s确保采集到的数据稳定。 这样可以得到一组阶梯式的标定图,图2~图4 所示。

图2 1 号传感元件标定结果

图3 2 号传感元件标定结果

图4 3 号传感元件标定结果
1 号Flex 弯曲传感器的标定试验结果显示,在传感器弯曲角度为0°时,其稳定的输出信号量为569,在弯曲角度为60°时,其稳定的输出信号量为442,整个标定试验过程中信号量的变化为127。 从图2 可以看出,当弯曲角度变大时,Flex 弯曲传感器的输出信号量变小。 可得出结论:1 号Flex 弯曲传感器的输出信号量与其弯曲角度的关系可以看作是线性的,且符合式(1)所分析的结果。
2 号Flex 弯曲传感器的标定试验结果显示,在传感器弯曲角度为0°时,其稳定的输出信号量为618,在弯曲角度为60°时,其稳定的输出信号量为495,整个标定试验过程中信号量的变化为123。 从图3 可以看出,当弯曲角度变大时,Flex 弯曲传感器的输出信号量变小。 可得出结论:2 号Flex 弯曲传感器的输出信号量与其弯曲角度的关系可近似认为是线性的,且符合式(1)分析的结果。
3 号Flex 弯曲传感器的标定试验结果显示,在传感器弯曲角度为0°时,其稳定的输出信号量为496,在弯曲角度为60°时,其稳定的输出信号量为366,整个标定试验过程中信号量的变化为130。 从图4 可以看出,当弯曲角度变大时,Flex弯曲传感器的输出信号量变小。 可得出结论:3号Flex 弯曲传感器的输出信号量与其弯曲角度的关系可近似认为是线性的,且符合式(1)分析的结果。
由标定得到的数据具有良好的线性关系。 在标定的范围内,角度变化统一在0°至60°,组合使用足以反映模型箱试验土体的变形。 为基坑模型箱加载过程中反应土体倾斜变化做了试验基础。
2 基于Flex 弯曲传感器的基坑模型加载试验
基坑加载设计思路为:该设计传感器主要用于岩土工程中土体的倾斜监测,在基坑模型箱试验中,基坑边纵向加载时土体侧向会发生大变形,其产生的侧移可以检测该新型Flex 测斜传感器是否能发挥作用。
在模型箱中,利用模型箱和试验所用砂土,堆砌与实际施工条件相似的基坑结构。 将标定好的三个flex 传感器预埋至基坑内设计位置。 模型箱为长方体,尺寸为700 mm×300 mm×400 mm。 模型箱四壁贴合底部有垫板贴合确保试验所用的沙土深度从刻度尺标识深度计算。 正面可视玻璃用可贴的刻度尺条做标记。
将制作好的Flex 测斜传感器连接好,测试可以成功接收信号后将其竖直埋置于土体如图5 中所示位置。 用挡板模拟基坑工程中的挡土墙,在加压过程中防止出现突然的大变形破坏。
试验过程为:如图5 所示的加载位置处逐渐加载砝码盘,加载以每100 s 加一个砝码盘的速度增加荷载。 砝码盘规格为5.1 kg。 当加载至数据出现瞬时下降趋势时停止增加砝码盘,此状态说明已经失稳。此时保存终端回传好的数据,并记录加载重量。

图5 Flex 无线传感器测斜布置图
2.1 试验结果分析

图6 Flex 回传数据整理
从图6 中数据可以看出,1,2,3 号传感器信号均呈现递减的趋势,在最终失稳时1 号与2 号出现了瞬时减小的趋势。 在0~400 s 的时间内整体变化波动很小,说明最初加载时对基坑的影响很小,基坑自身的塑形可以承受此时的荷载。 随着第400 s 时的继续加载造成基坑接近失稳,开始了出现较之前更大的变形。 3 号传感器的整体变形较小,这说明了距离基坑底部的侧向变形较小。 由上述设计试验后采得的数据整理分析得出角度数据与时间变化的关系图,如图7 所示。 图7 所示的三个传感器,随着加载过程,每个的Flex 传感器的弯曲角度均在0°~40°之间,其转化公式是将所得的信号数值图6 的数据,分别代入到各个传感器标定时的拟函数Y 值中,反算X 角度值。

图7 Flex 信号经标定转化为角度
3 基于Flex 弯曲传感器的边坡模型加载试验
边坡加载设计思路是,基于设计的Flex 传感可以监测土体层的变形,传感器水平设置时可以用作沉降监测,在边坡模型箱试验里可以测试设计传感器在其他情况下的应用。 且在试验时放置位移计,对试验结果辅助分析。
同样在模型箱中堆砌与实际施工条件相似的边坡结构,如图8 所示。 将标定好的三个Flex 传感器预埋至边坡设计位置,且一端需要与模型箱壁固定以确保初始埋置状态是水平。 模型箱为长方体,尺寸为700 mm×300 mm×400 mm。 模型箱所堆沙土要与四壁贴合,确保深度从刻度尺标识深度计算。正面可视玻璃用可贴的刻度尺条做标记。

图8 边坡模型Flex 传感器测沉降布置
3.1 试验结果分析
在边坡加载试验中Flex 回传的数据经标定转化后得到角度变形图如图9 所示。 2 号传感器整体趋近于0 且其变化幅度很小,说明在此点位的几乎没有发生弯折,此处传感器监测的土层是接近线性的。 符合加载时平面均布荷载的加载预期。 1 号传感器整体成线性正向递增,说明一号传感器变形角度向下,且变化比较均匀。 在停止加载时角度变化了3.3°。3 号传感器负向增加,且出现了瞬变趋势,说明其角度变化向上。 在停止加载时角度变化了9.8°
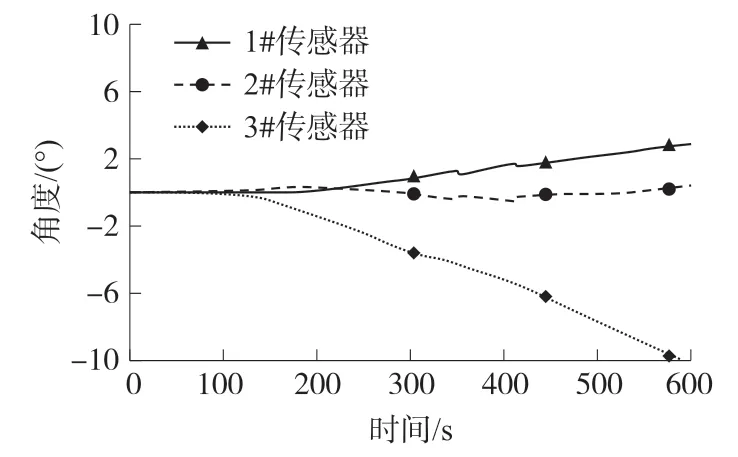
图9 Flex 测得角度变化
位移计的编号依次是2#、4#、3#位移计,接入动态采集仪的2#、4#、3#通道。 得到图10 所示数据。 3 号位移计先增加后减少,说明在3 号点位处土体先上升后下降,且在停止加载后土体下降量相较于其他点位变化量最少。 2 号点位整体呈现下降趋势,且较为均匀,在停止加载时其点位低于3 号点高于4 号点。 4号点位整体呈下降趋势且出现了瞬变,在停止加载时下降量最大。 所呈现的变形趋势符合Flex 测得的结果。 分析300 s~350 s 内的数据,Flex 测得其中的变化结果与传统位移计分析的变形趋势接近。

图10 位移计检测结果
经过对实验结果的处理,在整个实验过程中共计产生了9 000 多组有效数据。 在保证误差分析的准确性的同时要提高数据的分析效率,需要选取具有代表性的样本经行分析。 因此取500 s~600 s 这一区间的四号位移计和Flex1#与2#的测量数据做对比分析。从图11 中可以看出两者的沉降变化趋势基本保持一致,然后以传统位移计为参考标准进行相对误差计算,得到Flex 传感器的检测结果的偏差率为1.73%。引起这样的偏差主要来自两个方面。 一是在标定过程中,难以保证Flex 传感元件与封装结构内部不发生相对位移。 二是分布式传感器固有的累计误差问题,在结果分析时需要根据标定结果对传感器设置修正系数,来降低累计误差的影响。

图11 位移计与Flex 传感器检测结果对比
4 结论
本研究旨在研发一种基于Flex 无线传感技术与3D 打印技术,可应用于岩土工程领域的土体变形监测传感器。 通过室内试验以及相应的分析得出如下结论:
①较高自由度的3D 打印技术可以高效灵活的设计Flex 传感器的封装保护装置,并且通过该封装装置构成了位移传感结构。
②在标定过程中发现Flex 的线性关系可以在0~60°时保持良好的线性,由此可以通过集到数据反推被测土体倾斜角度及位移。 从标定试验发现所设计的Flex 传感器分辨率可以达到0.3°~0.4°
③该Flex 在单向变形时可以检测到角度变化,适合用在基坑这类可预知变形趋势的检测中,相比于传统测斜传感器其无线传输更有优势。
④所设计传感器和土体位移计之间会有误差,整体偏差率为1.73%,在使用过程中可以保证测得土体变形的变化趋势。 并提出了可以通过两个角度来进一步提高传感器检测精度。
