风电齿轮箱磨损状态静电在线监测方法研究
2021-05-14刘舒沁刘若晨孙见忠张进武
刘舒沁,刘若晨,孙见忠,张进武
(1.江苏理工学院汽车与交通工程学院,江苏常州213001;2.南京航空航天大学民航学院,江苏南京211106)
风电齿轮箱的结构复杂,在运行过程中其不同结构之间存在较大差异,且在恶劣环境中持续工作时,其性能不断退化。在风电齿轮箱性能不断退化的过程中,传统监测手段很难有效地在故障出现的早期就及时监测到故障,而等发现故障时,风电齿轮箱的传动系统已出现严重的故障甚至失效[1‐3]。目前,国内外常用的风电齿轮箱状态监测方法有振动监测、温度监测和油液磨粒监测等[4‐5]。为解决传统监测方法不能及时发现故障这一问题,提出将静电监测技术应用于风电齿轮箱磨损状态的监测。
静电监测技术是一种新型的机械系统状态监测技术,它能够实时监测机械系统的1个或多个状态参数,这些参数能够为机械系统的性能异常提供故障预警信息。相关技术人员根据这些参数反馈的信息,及时对机械系统进行视情维护,从而避免机械系统故障[6]。静电监测技术最早应用于航空领域,最初是为了探测航空发动机气路中的碎片,以检测外来物吸入和叶片摩擦等情况[7‐13]。静电监测原理如图1所示(图中OLS表示润滑油路静电传感器,Q表示电荷量),静电传感器通过感应探极检测移动电荷量,并通过电荷放大电路及A/D(analog/digital,模拟/数字)转换器将电荷信号转换成电压信号输出。

图1 静电监测原理Fig.1 Principle of electrostatic monitoring
Harvey等[14]采用3个磨损区域静电传感器和1个润滑油路静电传感器来监测由内圈预缩和超载加速的圆锥滚子轴承的失效状态。在监测过程中发现:在轴承失效前4小时,润滑油路静电传感器检测到排气管路中磨损碎片的产生量增加,安装在测试轴承附近的磨损区域静电传感器的监测结果也显示轴承性能恶化;在故障发生前6.5小时,3个磨损区域静电传感器的输出值呈稳定上升趋势。结果表明,磨损区域静电传感器能够识别失效轴承的位置,而润滑油路静电传感器能够检测到排气管路中的磨损碎片,由此说明静电监测技术是一种可行且能够替代传统监测技术(如振动监测技术)的新型状态监测技术。Craig等[15‐16]通过结合其他状态监测技术,进一步研究了轴承磨损状态静电监测方法,通过磨损部位的动态电荷量、加速度和温度对轴承的摩擦磨损状态进行识别,摩擦后的良性磨损表现为磨损部位和油路的电荷量减少[17‐18]。
在上述研究的基础上,笔者根据静电监测原理搭建了风电齿轮传动系统静电监测平台,采用多个同类型的静电传感器对风电齿轮箱的磨损状态进行监测,并基于传统方法提取特征参数,然后运用移动窗局部离群因子(moving window local outlier factor,MWLOF)算法分别对负荷试验和破坏试验[19]中风电齿轮箱磨损状态的静电监测信号进行分析,旨在验证静电监测技术在风电齿轮箱状态监测应用中的可行性。
1 多监测信息融合算法
1.1 特征参数提取
静电信号特征参数的提取是判断故障诊断准确性的前提。目前,常用的特征参数提取方法为传统的时域特征参数提取方法。传统的时域特征参数分为有量纲参数和无量纲参数,包括平均值、均方根、标准差、峰‐峰值、偏度和峭度等[20]。
时域分析是一种线性分析方法,在实际应用中其对静电信号的变化不能作出及时的反应,这一缺点在一定程度上限制了时域分析的发展。为了弥补传统时域分析的不足,引入复杂度度量参数,如样本熵、模糊熵和排列熵[20]。复杂度度量法是一种非线性分析方法,该方法有效提高了静电监测技术的早期故障诊断能力。
1.2 LOF算法的原理
局部离群因子(local outlier factor,LOF)算法是一种基于密度的检测算法[21]。为了能够检测出离群点,为每个数据赋予一个指标,从而实现对每个数据离群程度的判断。其具体计算步骤如下。
步骤1 给定一个数据集x=[x1x2…xN]T,根据式(1)找出数据xa(a =1,2,…,N )的k个近邻点,并将这些近邻点的集合记为k(xa)。

式中:d(xa,xb)为xa与xb间的距离。
步骤2 将xa按从小到大的顺序进行排列,β(xa)为xa与排列后第k个近邻点间的距离,该值也是d(xa,xb)的第k个最小的值,即为xa的邻域最大展开半径。定义xa与其任一近邻点xb的可达距离R(xa,xb)为:

由式(2)可以看出,xa与xb的可达距离是xa与xb间的实际距离和xa邻域最大展开半径中的较大值。值得注意的是,R(xa,xb)≠R(xb,xa),即可达距离不可逆。
步骤3 计算xa的局部可达密度l(xa):

步骤4 根据式(3)计算xa及其所有近邻点的局部可达密度,并根据所得结果计算xa的LOF值f(xa):
由LOF值的定义可知,f(xa)表示xa的偏离程度,通过f(xa)可判断xa是否分布在较为集中的区域。当f(xa)<1时,xa是正常点的概率较大;当f(xa)=1时,xa的局部可达密度等于其邻域内各点的平均局部可达密度,无法判断xa是否为离群点;当f(xa)>1时,xa为离群点。
2 多静电传感器信息融合
2.1 多静电传感器信号初始转化
考虑到实际数据集是由多个静电传感器采集的数据组成的,因此在运用LOF算法融合信息时,须先对数据集进行标准化处理。若不对数据集进行标准化处理,则在计算时无法准确判断故障的发生。数据集标准化处理步骤如下。
首 先 ,假 设 An={an1,an2,…,ant}( )n=1,2,…,d为对应的时间序列为t时某路(共d路)静电传感器探极的输出信号,对各路静电信号进行特征参数提取,得到各路静电信号在同一时间序列上的m个特征参数,由此形成初始数据集B=[b1b2…bm],其中
然后,利用式(5)对初始数据集B进行标准化处理,得到一个新的数据集X。

式中:xnr为标准处理后的数据;μ(br)为初始数据集B中某特征参数的均值;σ(br)为初始数据集B中某特征参数的均方差。
最后,基于计算得到的新数据集X,采用LOF算法对多静电传感器信息进行融合。
2.2 基于MWLOF的模型在线更新
为了避免监测系统将静电监测信号的正常变化当作故障,将移动窗引入LOF算法,形成MWLOF算法。其计算步骤如下。
假设初始窗口为W1,长度为L,根据标准化处理结果,从大到小排列移动窗内的数据xj(j=1,2,…,L),并将所得近邻点的集合记作k1(xj)。然后,利用式(2)和式(3)计算xj与其任一近邻点xq的可达距离d(xj,xq),以及xj的局部可达密度l1(xj)。最后,计算得到移动窗口内每个数据的LOF值。
移动窗口的模型在线更新过程如图2所示。图中:3个矩阵分别表示原始窗口Wi、移除起始数据xi后的过渡窗口͂以及添加新样本xi+L后的新窗口Wi+L,图中μ表示均值,σ表示均方差。
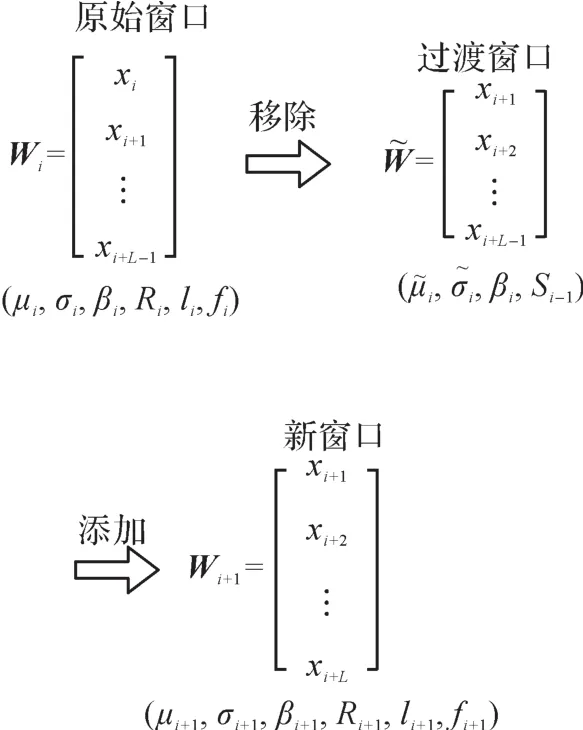
图2 移动窗口的模型在线更新Fig.2 Online update of model of moving window
模型在线更新的具体步骤主要有2步:移除和添加。
1)移除。将原始窗口内数据集中的起始数据xi移除后,剩余数据(即过渡窗口内数据)的均值、方差和均方差均发生变化。
从原始窗口Wi更新到过渡窗口͂后,数据xi的所有信息被移除,将更新前原始窗口Wi中以数据xi为邻域关系的数据存储到集合Si-1中。
2)添加。在将原始窗口内起始数据xi移除以及新数据xi+L被判定为正常点后,将它添加进过渡窗口中,然后进行在线更新,得到新窗口Wi+1。此时,新窗口内数据的均值、方差和均方差发生变化。
当添加新数据xi+L后,若新数据xi+L距离目标数据更近,则新窗口内数据xj的近邻点集合ki+1(xj)中的值将更新为:

根据可达距离的定义,数据xj的β(xj)发生了变化,但xj与其近邻点xq的可达距离不一定发生变化。为了避免出现这种不确定性,当移动窗口中数据的任意近邻点属于集合Si-1时,须对该数据的可达距离重新进行计算:
根据重新计算的可达距离,得到新窗口内各数据的局部可达密度和LOF值分别为:

根据上文分析可知,如果fi(xi+L)≤1,那么其周围分布着大量的数据。但须要注意的是,由于fi(xi+L)≤1,控制限不再更新,而新数据xi+L的引入会使数据的邻域关系更新。
3 试验验证
以风电齿轮箱作为研究对象,在2组风电齿轮传动系统的不同位置安装润滑油路静电传感器,并分别进行负荷试验和破坏试验。由于润滑油路静电监测信号不受工况的影响,采用不考虑工况变化的MW‐LOF算法对风电齿轮传动系统稳定运行后的前1 000个静电监测信号进行融合计算。
3.1 负荷试验
风电齿轮传动系统负荷试验静电监测平台如图3所示。该平台采用的是新型3.5 MW风电齿轮传动系统,包括主、陪试齿轮箱,其中陪试齿轮箱的速比大于主试齿轮箱的速比。由于2个风电齿轮箱的结构复杂,而试验条件有限,仅分别在2个齿轮箱的出油口处安装静电传感器。2个静电传感器通过探极与监测系统连接,以进行数据传输与处理。
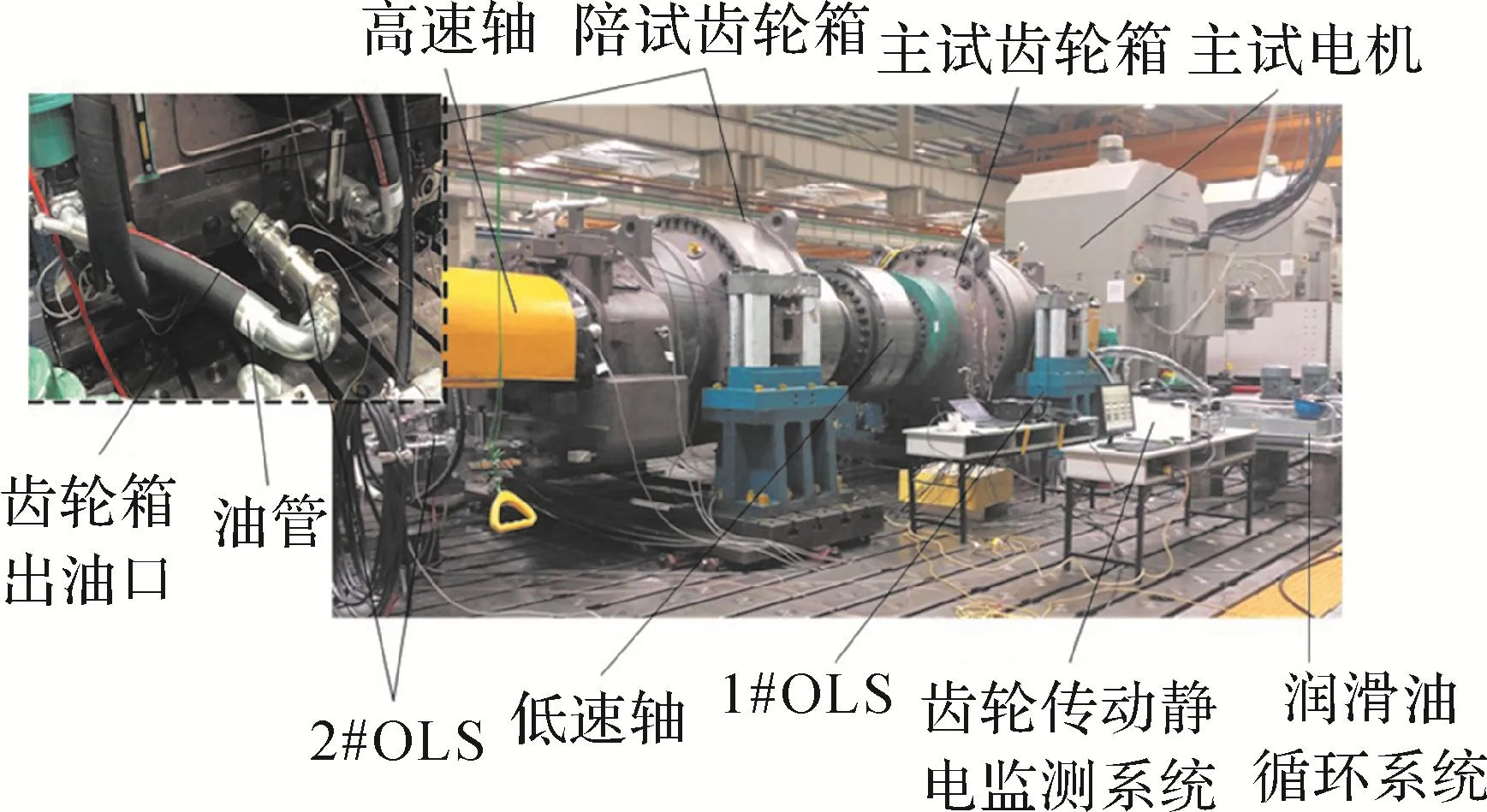
图3 风电齿轮传动系统负荷试验静电监测平台Fig.3 Electrostatic monitoring platform for load test of wind power gear transmission system
风电齿轮传动系统负荷试验的动力源和加载装置为2台功率为8 MW的电机。负荷试验共连续循环进行50次,每次均持续570 min。为了便于观察,将这50次循环分成5个组,每10次循环为一组。具体试验步骤如下:开始试验时,启动静电监测系统,监测系统的运行始终与风电齿轮传动系统的运行保持一致;在试验过程中,连续采集5次数据后停机检查,然后继续采集。若风电齿轮传动系统出现异常或报警,监测系统依旧记录数据,作为判断该传动系统状态的依据。当试验结束后,对监测到的静电信号进行分析。
风电齿轮传动系统负荷试验静电监测结果如图4所示。为了使分析更加准确,对监测结果进行阶段化处理,如图5所示。图中LOF值表示风电齿轮箱磨损状态静电监测信号的LOF值,下文同。
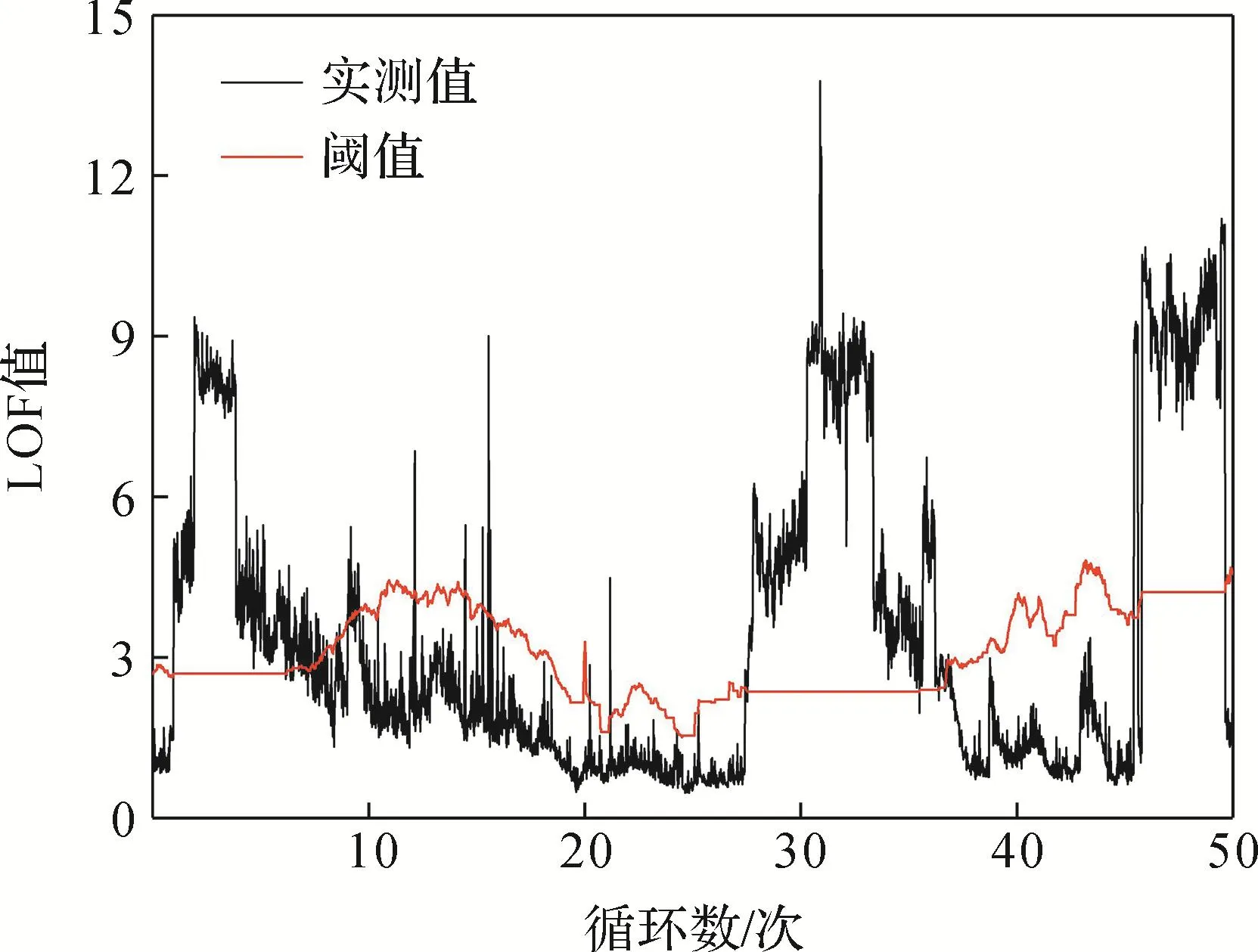
图4 风电齿轮传动系统负荷试验静电监测结果Fig.4 Electrostatic monitoring results of load test of wind power gear transmission system
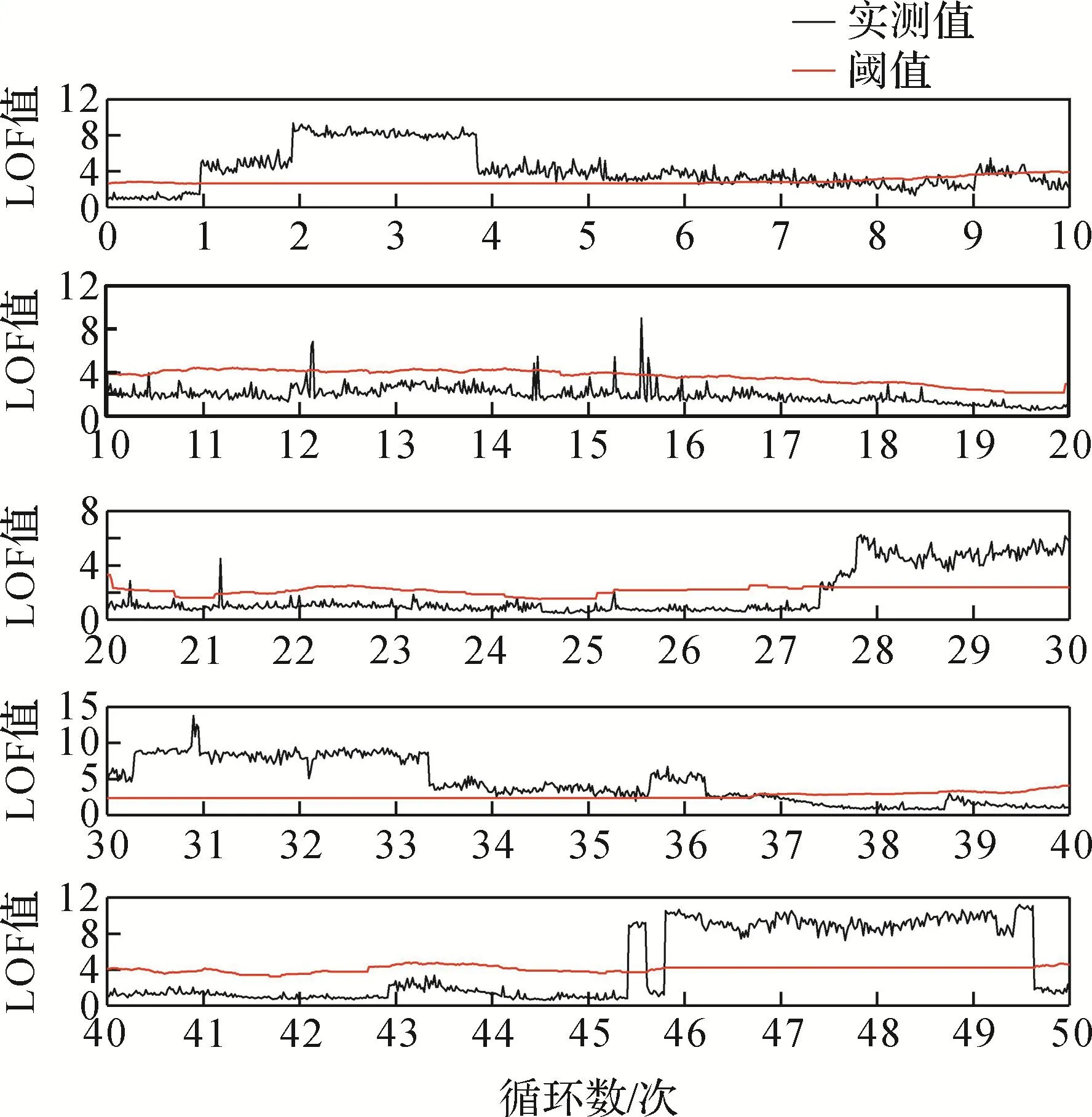
图5 风电齿轮传动系统负荷试验各阶段静电监测结果Fig.5 Electrostatic monitoring results of each stage of load test of wind power gear transmission system
通过观察图4和图5可知,在整个风电齿轮传动系统负荷试验中,静电监测信号的变化幅度较大;共26次循环的静电监测信号的LOF值基本稳定在阈值以下,其他循环的静电监测信号的LOF值基本在阈值以上。在整个负荷试验过程中,风电齿轮箱磨损状态静电监测信号的变化规律为:第1次循环中静电监测信号的LOF值始终小于阈值;第2次循环中静电监测信号的LOF值超过阈值,LOF值变化平稳;第3次循环中静电监测信号的LOF值开始增大;第4次循环中静电监测信号的LOF值先持续增大后逐渐减小;第5次循环中静电监测信号的LOF值逐渐减小,一直到第10次循环中静电监测信号的LOF值减小至阈值之下;第11循环至第27次循环中静电监测信号的LOF值基本保持稳定;第28次循环中静电监测信号的LOF值出现突变,LOF值急剧增大并且大于阈值;第31次循环中静电监测信号的LOF值进一步增大;当运行至第34次循环时,静电监测信号的LOF值开始呈减小趋势;第36次循环中静电监测信号的LOF值先增大后减小;第37次循环中静电监测信号的LOF值减小并且小于阈值;第38次循环至第45次循环中静电监测信号的LOF值变化平稳;第46次循环中静电监测信号的LOF值先增大后减小,一段时间之后再次增大;第47次循环至第49次循环中静电监测信号的LOF值较为稳定;第50次循环中静电监测信号的LOF值再次减小,一直减小至阈值以下。
由图4和图5可知,上述风电齿轮传动系统在第2和第3次循环中产生了故障,通过采取一定的措施后重新运行;在第28次循环后该传动系统的性能出现退化;在第31次循环和第46次循环中该传动系统出现了早期故障。由此可推断,该风电齿轮传动系统未出现较严重的故障,能正常运行。
上述结果表明:静电监测技术具有高灵敏度、高分辨率的特征,它可以监测到系统轻微故障引起的变化,提供早期预警。
3.2 破坏试验
风电齿轮传动系统破坏试验静电监测平台如图6所示。该平台采用的是某新型2.5 MW风电齿轮传动系统。与负荷试验静电监测平台不同的是,该平台中的静电传感器是经改装设计后再安装在风电齿轮传动系统的回油管路上的。破坏试验的动力源和加载装置为2台功率为3.6 MW的电机。具体试验过程如下:开始试验时,启动静电监测系统,设置风电齿轮传动系统的转速和扭矩,其中转速始终是额定转速,扭矩为2倍额定扭矩;在试验过程中,保持风电齿轮传动系统持续运行。破坏试验只须对主试齿轮箱的磨损状态静电信号进行在线监测,监测结果如图7(a)所示。为使分析更加准确,对第4 000个至第4 400个静电监测信号的LOF值的变化进行放大分析,如图7(b)所示。
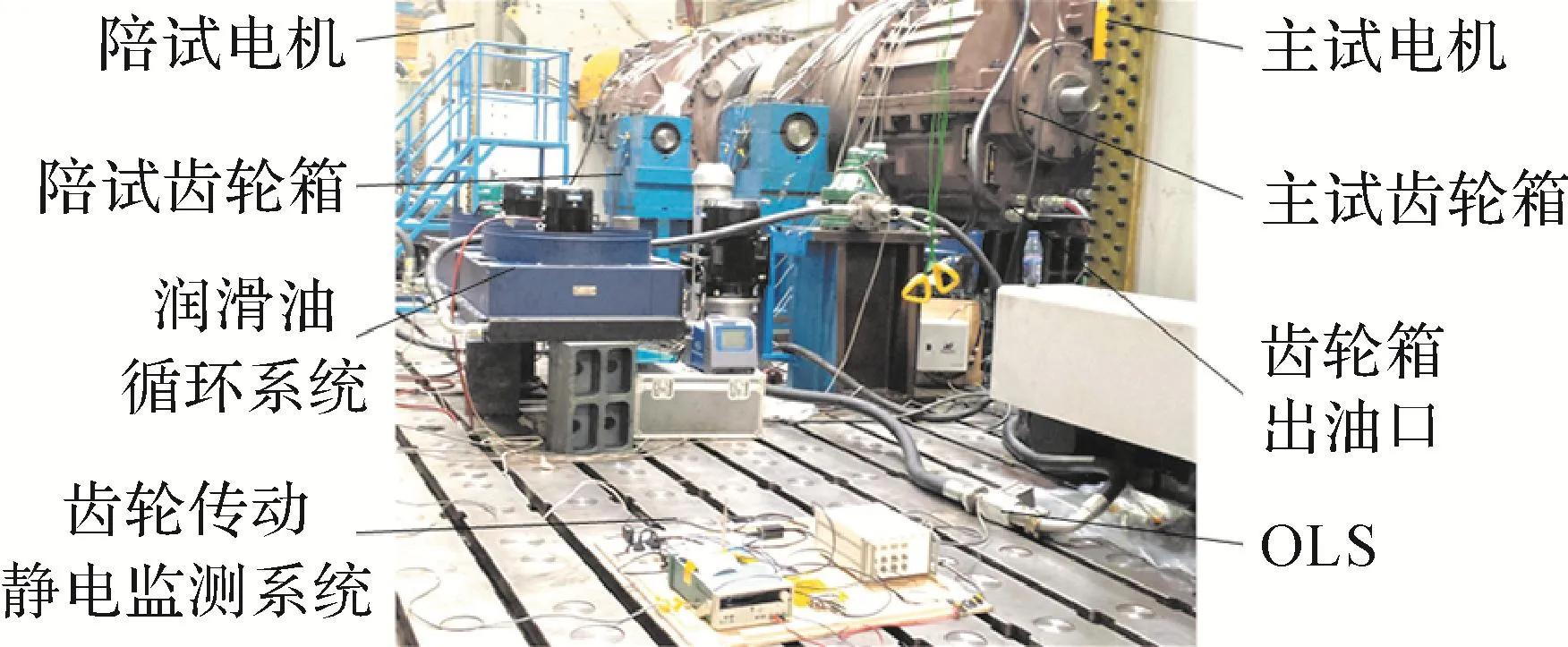
图6 风电齿轮传动系统破坏试验静电监测平台Fig.6 Electrostatic monitoring platform for damage test of wind power gear transmission system
由图7可知,在整个风电齿轮传动系统破坏试验中,采集的静电监测信号的数量为4 891个,前4 320个静电监测信号的LOF值小于阈值;第3 223,4 068和4 188个静电监测信号的LOF值远远大于阈值。
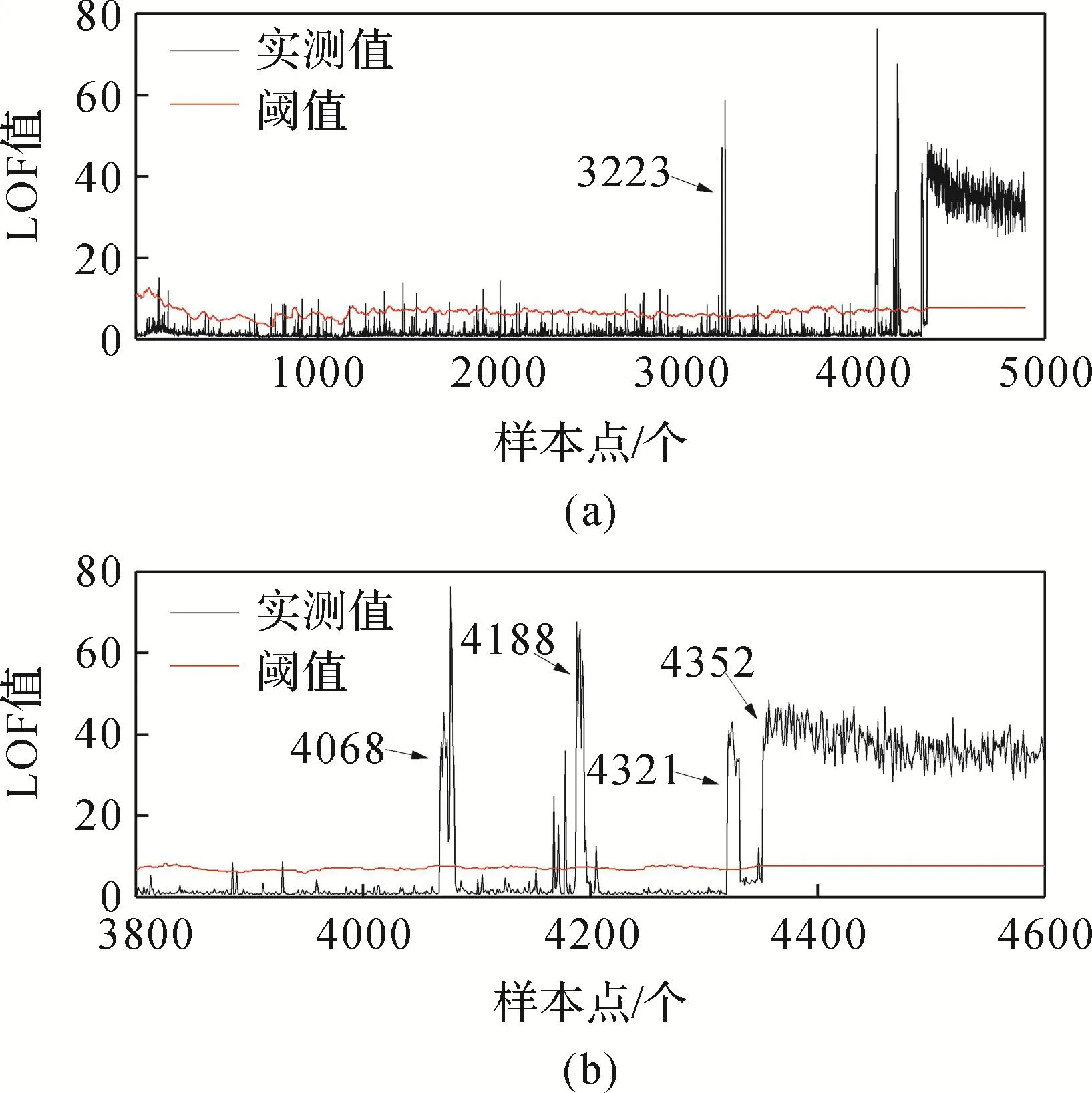
图7 风电齿轮传动系统破坏试验静电监测结果Fig.7 Electrostatic monitoring results of damage test of wind power gear transmission system
通过观察可知,第3 223个静电监测信号的LOF值突变,说明此时风电齿轮传动系统开始出现故障,但仍然能够正常运行;第4 321个静电监测信号之后,LOF值的异常值增多,说明此时风电齿轮传动系统接近失效;第4 352个静电监测信号之后,其LOF值均大于阈值,说明此时风电齿轮传动系统已完全失效。
上述结果表明:相比于传统监测技术,静电监测技术具有更高的灵敏度,能够更准确且更早地监测到故障的发生。
4 结 论
运用MWLOF算法分析了风电齿轮传动系统负荷试验和破坏试验中风电齿轮箱磨损状态静电监测信号的变化趋势。研究结果表明,静电监测相比于振动监测等传统监测技术能够更早地监测到风电齿轮箱的故障并作出较准确的预警,这可为针对大型设备关键部件的状态监测提供参考。
